


资料
1 python调用g2o版本
https://github.com/uoip/g2opy
2 pybind11 调用c++
3 如何添加gnss边和节点 边
https://www.cnblogs.com/gooutlook/p/18349180
根据pyslam中的调用方式解析一下调用过程和编译过程,有利于后期添加修改
0编译库
首先进入环境
conda activate pyslam
其中g2o编译部分指令
print_blue "=================================================================="
print_blue "Configuring and building thirdparty/g2o ..."
cd thirdparty
# if [ ! -d g2opy ]; then
# if [[ "$OSTYPE" == "linux-gnu"* ]]; then
# sudo apt-get install -y libsuitesparse-dev libeigen3-dev
# fi
# git clone https://github.com/uoip/g2opy.git
# cd g2opy
# G2OPY_REVISION=5587024
# git checkout $G2OPY_REVISION
# git apply ../g2opy.patch
# cd ..
# fi
cd g2opy
if [ ! -f lib/g2o.cpython*.so ]; then
if [[ "$OSTYPE" == "linux-gnu"* ]]; then
sudo apt-get install -y libsuitesparse-dev libeigen3-dev
fi
make_buid_dir
cd build
cmake .. -DPython3_EXECUTABLE=$(which python3) $EXTERNAL_OPTIONS
make -j8
cd ..
#python3 setup.py install --user
fi
cd $ROOT_DIR
print_blue "=================================================================="
print_blue "Configuring and building thirdparty/pydbow3 ..."
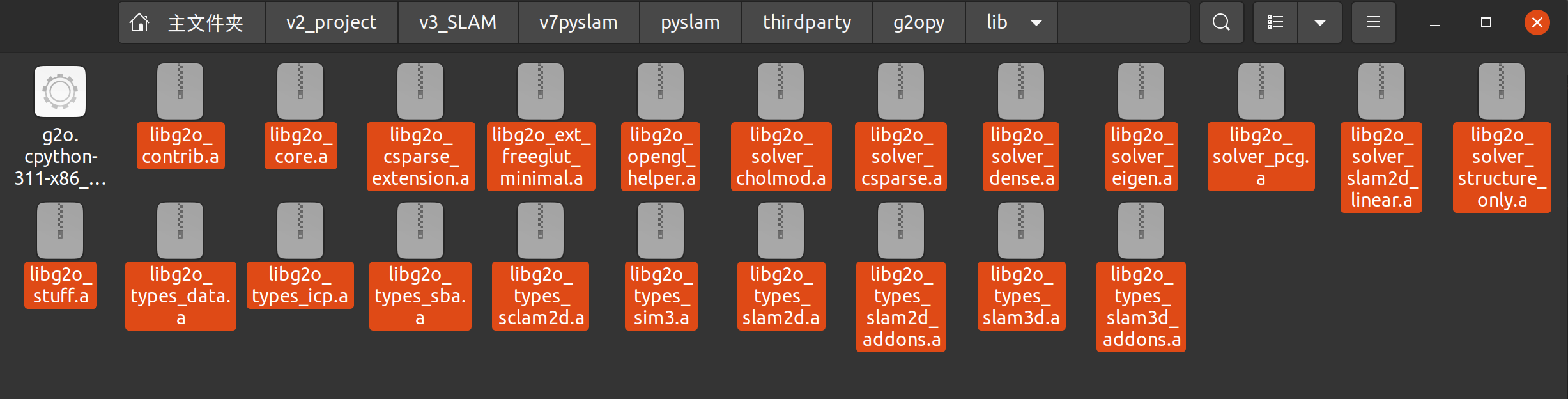
其中执行编译c++库位置
最后编译python调用库
安装python库到环境 方便后期python调用
python3 setup.py install --user
1 找到c++ 节点和边的定义
重投影边
输入:
节点1 3D地图点
节点2 相机位姿SE3
重投影边
// Projection using focal_length in x and y directions
class EdgeSE3ProjectXYZ : public BaseBinaryEdge<2, Vector2D, VertexSBAPointXYZ, VertexSE3Expmap> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
EdgeSE3ProjectXYZ();
bool read(std::istream &is);
bool write(std::ostream &os) const;
void computeError() {
const VertexSE3Expmap *v1 = static_cast<const VertexSE3Expmap *>(_vertices[1]);
const VertexSBAPointXYZ *v2 = static_cast<const VertexSBAPointXYZ *>(_vertices[0]);
Vector2D obs(_measurement);
_error = obs - cam_project(v1->estimate().map(v2->estimate()));
}
bool isDepthPositive() {
const VertexSE3Expmap *v1 = static_cast<const VertexSE3Expmap *>(_vertices[1]);
const VertexSBAPointXYZ *v2 = static_cast<const VertexSBAPointXYZ *>(_vertices[0]);
return (v1->estimate().map(v2->estimate()))(2) > 0.0;
}
virtual void linearizeOplus();
Vector2D cam_project(const Vector3D &trans_xyz) const;
double fx, fy, cx, cy;
};
地图点节点
/**
* \brief Point vertex, XYZ
*/
class G2O_TYPES_SBA_API VertexSBAPointXYZ : public BaseVertex<3, Vector3D>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexSBAPointXYZ();
virtual bool read(std::istream& is);
virtual bool write(std::ostream& os) const;
virtual void setToOriginImpl() {
_estimate.fill(0.);
}
virtual void oplusImpl(const double* update)
{
Eigen::Map<const Vector3D> v(update);
_estimate += v;
}
};
相机位姿节点
/**
* \brief SE3 Vertex parameterized internally with a transformation matrix
and externally with its exponential map
*/
class G2O_TYPES_SBA_API VertexSE3Expmap : public BaseVertex<6, SE3Quat>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexSE3Expmap();
bool read(std::istream& is);
bool write(std::ostream& os) const;
virtual void setToOriginImpl() {
_estimate = SE3Quat();
}
virtual void oplusImpl(const double* update_) {
Eigen::Map<const Vector6d> update(update_);
setEstimate(SE3Quat::exp(update)*estimate());
}
};
最后编译成c++库
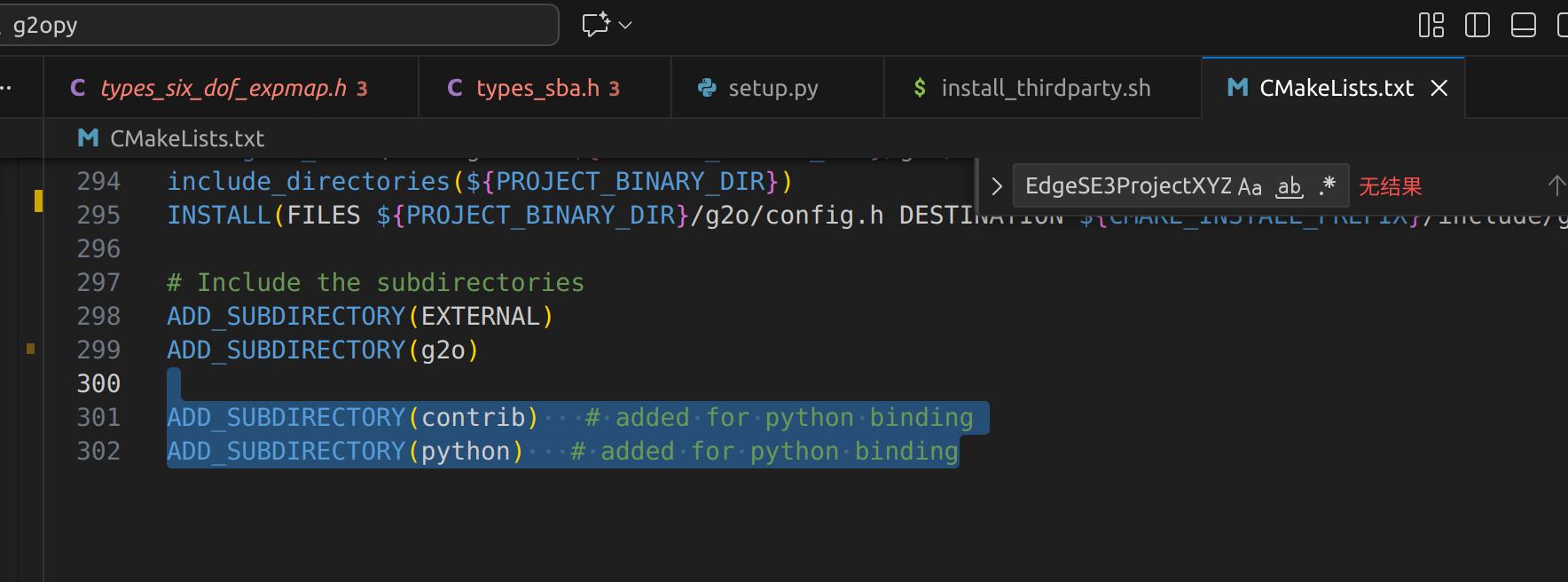
2 python绑定位置
重投影边
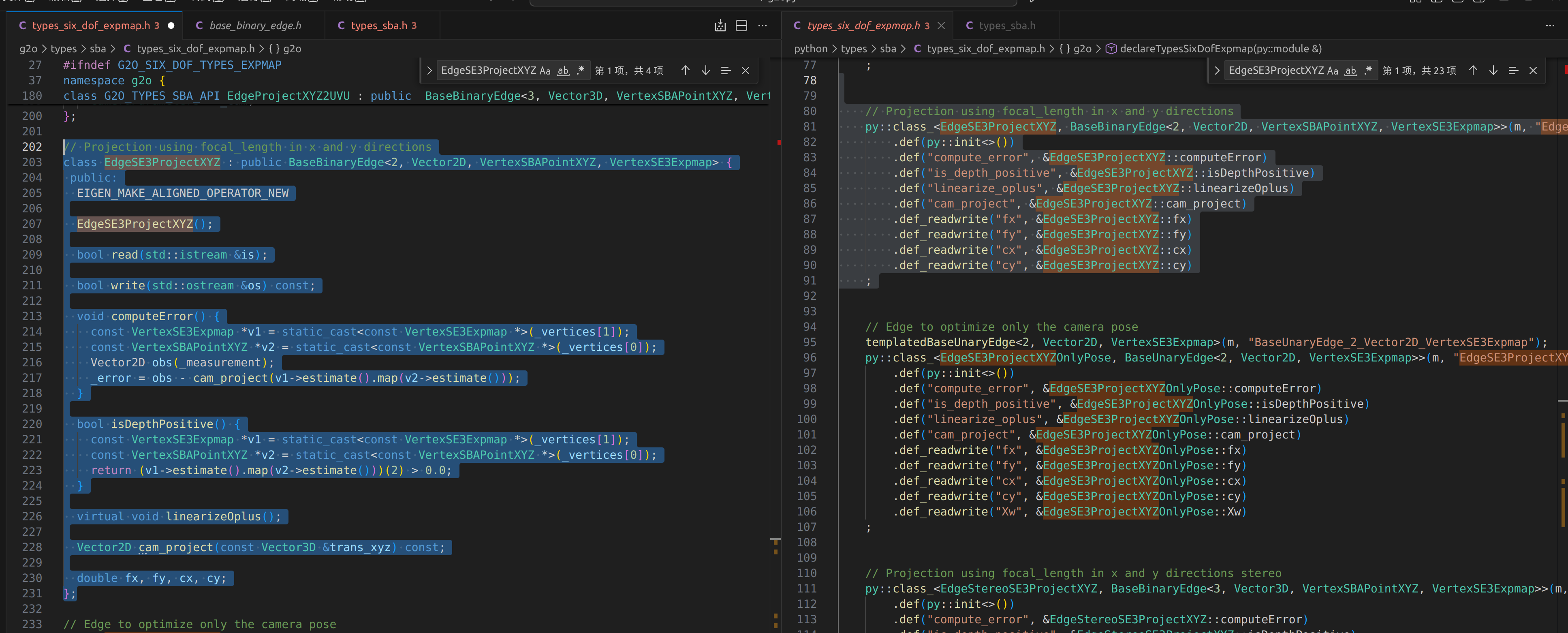
// Projection using focal_length in x and y directions
py::class_<EdgeSE3ProjectXYZ, BaseBinaryEdge<2, Vector2D, VertexSBAPointXYZ, VertexSE3Expmap>>(m, "EdgeSE3ProjectXYZ")
.def(py::init<>())
.def("compute_error", &EdgeSE3ProjectXYZ::computeError)
.def("is_depth_positive", &EdgeSE3ProjectXYZ::isDepthPositive)
.def("linearize_oplus", &EdgeSE3ProjectXYZ::linearizeOplus)
.def("cam_project", &EdgeSE3ProjectXYZ::cam_project)
.def_readwrite("fx", &EdgeSE3ProjectXYZ::fx)
.def_readwrite("fy", &EdgeSE3ProjectXYZ::fy)
.def_readwrite("cx", &EdgeSE3ProjectXYZ::cx)
.def_readwrite("cy", &EdgeSE3ProjectXYZ::cy)
;
相机位姿节点绑定
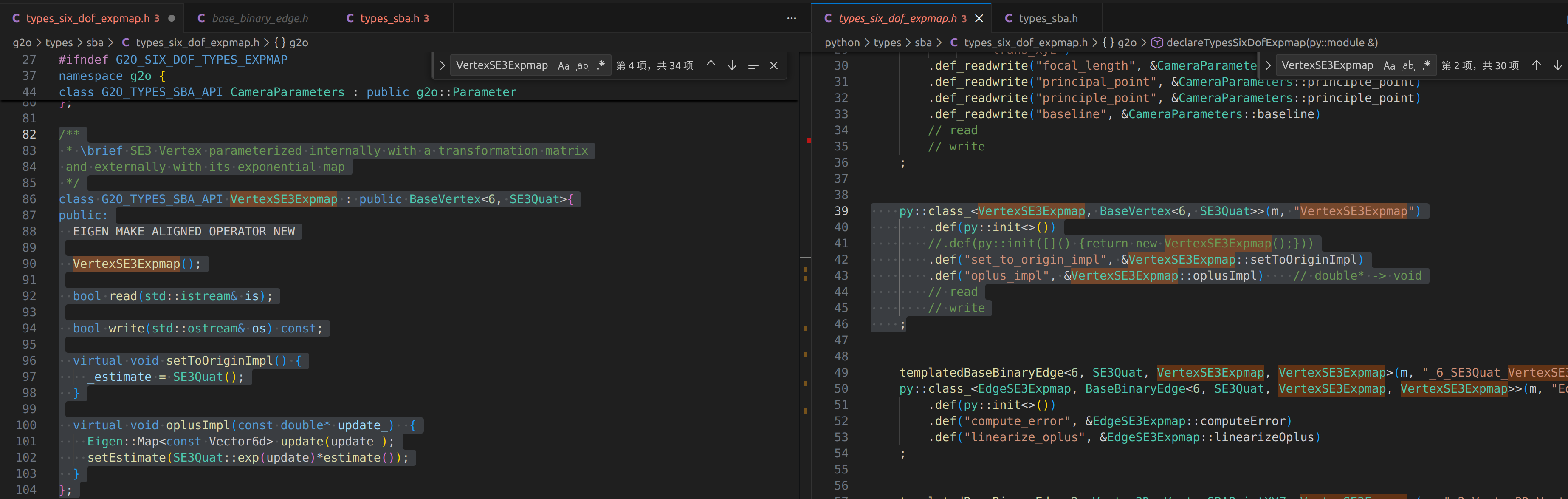
py::class_<VertexSE3Expmap, BaseVertex<6, SE3Quat>>(m, "VertexSE3Expmap")
.def(py::init<>())
//.def(py::init([]() {return new VertexSE3Expmap();}))
.def("set_to_origin_impl", &VertexSE3Expmap::setToOriginImpl)
.def("oplus_impl", &VertexSE3Expmap::oplusImpl) // double* -> void
// read
// write
;
地图节点
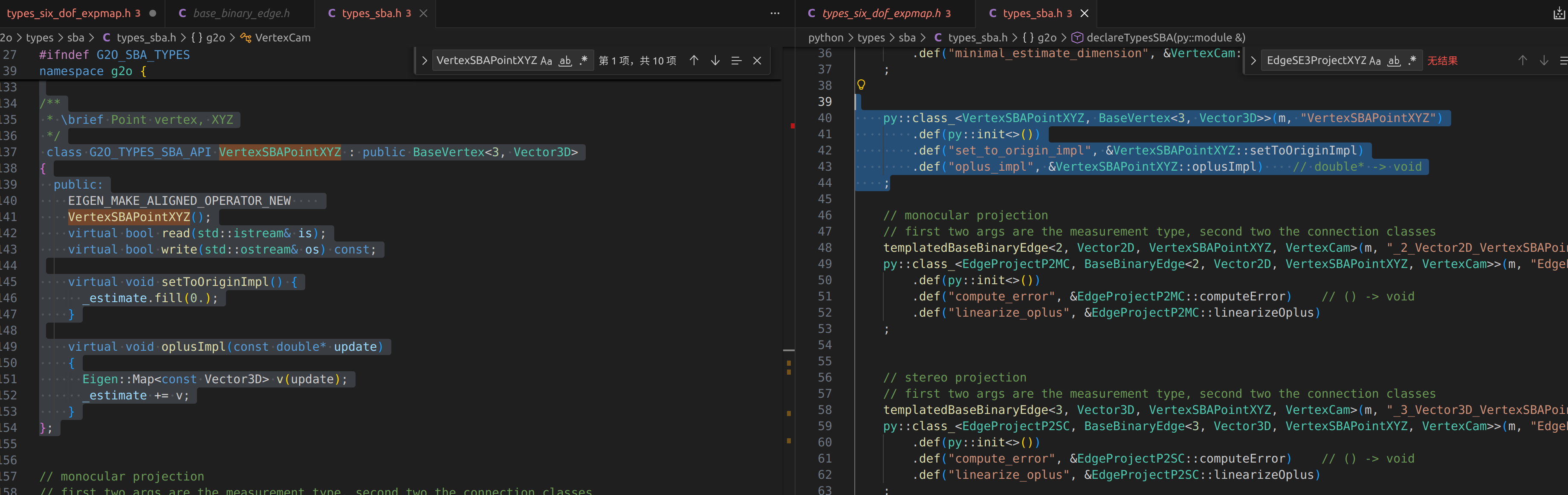
py::class_<VertexSBAPointXYZ, BaseVertex<3, Vector3D>>(m, "VertexSBAPointXYZ")
.def(py::init<>())
.def("set_to_origin_impl", &VertexSBAPointXYZ::setToOriginImpl)
.def("oplus_impl", &VertexSBAPointXYZ::oplusImpl) // double* -> void
;
最后编译成一个python调用库
这个库 执行python安装时候,脚本被拷贝到python系统环境库目录,方便调用时候找到(conda 是对应的python库目录)
python install setup.py
__library_file__ = './lib/g2o*.so'
__version__ = '0.0.1'
'''
g2o.cpython-311-x86_64-linux-gnu.so
├───┼─────────┼─────────┼────────┼──
↑ ↑ ↑ ↑ ↑
│ │ │ │ 扩展名
│ │ │ │
│ │ │ 平台架构
│ │ │
│ │ Python版本
│ │
│ CPython实现标识
│
库名
'''
class CopyLibFile(install):
""""
Directly copy library file to python's site-packages directory.
"""
def run(self):
#get_python_lib(): 获取 Python 的包安装目录
install_dir = get_python_lib()
#使用通配符查找 ./lib/g2o*.so文件
lib_file = glob.glob(__library_file__)
assert len(lib_file) == 1
print('copying {} -> {}'.format(lib_file[0], install_dir))
#shutil.copy(): 将库文件复制到 site-packages
shutil.copy(lib_file[0], install_dir)
3 python调用g2o库
导入库
import g2o
初始化求解器
# create g2o optimizer
opt = g2o.SparseOptimizer()
# block_solver = g2o.BlockSolverSE3(g2o.LinearSolverCSparseSE3())
block_solver = g2o.BlockSolverSE3(g2o.LinearSolverEigenSE3())
# block_solver = g2o.BlockSolverSE3(g2o.LinearSolverCholmodSE3())
solver = g2o.OptimizationAlgorithmLevenberg(block_solver)
opt.set_algorithm(solver)
opt.set_force_stop_flag(abort_flag)
thHuberMono = math.sqrt(5.991) # chi-square 2 DOFS
thHuberStereo = math.sqrt(7.815) # chi-square 3 DOFS
定义相机位姿加入优化器
graph_keyframes, graph_points, graph_edges = {}, {}, {}
# add frame vertices to graph
for kf in (
local_frames if fixed_points else keyframes
): # if points are fixed then consider just the local frames, otherwise we need all frames or at least two frames for each point
if kf.is_bad:
continue
# print('adding vertex frame ', f.id, ' to graph')
se3 = g2o.SE3Quat(kf.Rcw.copy(), kf.tcw.copy())
v_se3 = g2o.VertexSE3Expmap()
v_se3.set_estimate(se3)
v_se3.set_id(kf.kid * 2) # even ids (use f.kid here!)
v_se3.set_fixed(kf.kid == 0 or kf not in local_frames) # (use f.kid here!)
opt.add_vertex(v_se3)
graph_keyframes[kf] = v_se3
定义地图点加入优化器
inv_level_sigmas2 = FeatureTrackerShared.feature_manager.inv_level_sigmas2
eye2 = np.eye(2)
eye3 = np.eye(3)
# add point vertices to graph
for p in points:
if p is None or p.is_bad: # do not consider bad points
continue
# if __debug__:
# if not any([f in keyframes for f in p.keyframes()]):
# Printer.red('point without a viewing frame!!')
# continue
# print('adding vertex point ', p.id,' to graph')
v_p = g2o.VertexSBAPointXYZ()
v_p.set_id(p.id * 2 + 1) # odd ids
v_p.set_estimate(p.pt[0:3].copy())
v_p.set_marginalized(True)
v_p.set_fixed(fixed_points)
opt.add_vertex(v_p)
graph_points[p] = v_p
定义重投影边
else:
edge = g2o.EdgeSE3ProjectXYZ()
edge.set_vertex(0, v_p)
edge.set_vertex(1, graph_keyframes[kf])
edge.set_measurement(kf_kpsu_idx)
edge.set_information(eye2 * invSigma2)
if use_robust_kernel:
edge.set_robust_kernel(g2o.RobustKernelHuber(thHuberMono))
edge.fx = camera.fx
edge.fy = camera.fy
edge.cx = camera.cx
edge.cy = camera.cy
opt.add_edge(edge)
graph_edges[edge] = is_stereo_obs
num_edges += 1
设置鲁邦核函数
if abort_flag.value:
return -1, result_dict
if verbose:
opt.set_verbose(True)
chi2Mono = 5.991 # chi-square 2 DOFs
chi2Stereo = 7.815 # chi-square 3 DOFs
opt.initialize_optimization()
opt.compute_active_errors()
initial_mean_squared_error = opt.active_chi2() / max(num_edges, 1)
if robust_rounds > 0:
opt.optimize(robust_rounds)
# check inliers observation
for edge, edge_data in graph_edges.items():
is_stereo = edge_data
edge_chi2 = edge.chi2()
chi2_check_failure = (edge_chi2 > chi2Stereo) if is_stereo else (edge_chi2 > chi2Mono)
if chi2_check_failure or not edge.is_depth_positive():
edge.set_level(1)
num_bad_edges += 1
edge.set_robust_kernel(None)
if abort_flag.value:
return -1, result_dict
开始优化
opt.initialize_optimization()
opt.optimize(final_rounds)
取出优化结果
相机位姿
地图点位置
# put frames back
if keyframe_updates is not None:
# store the updates in a dictionary
for kf in graph_keyframes:
est = graph_keyframes[kf].estimate()
R, t = est.rotation().matrix(), est.translation()
T = poseRt(R, t)
keyframe_updates[kf.id] = T
else:
for kf in graph_keyframes:
est = graph_keyframes[kf].estimate()
R, t = est.rotation().matrix(), est.translation()
T = poseRt(R, t)
if loop_kf_id == 0:
# direct update on map
kf.update_pose(T)
else:
# update for loop closure
kf.Tcw_GBA = T
kf.GBA_kf_id = loop_kf_id
# put points back
if not fixed_points:
if point_updates is not None:
# store the updates in a dictionary
for p in graph_points:
point_updates[p.id] = np.array(graph_points[p].estimate())
else:
if loop_kf_id == 0:
for p in graph_points:
# direct update on map
p.update_position(np.array(graph_points[p].estimate()))
p.update_normal_and_depth(force=True)
else:
for p in graph_points:
# update for loop closure
p.pt_GBA = np.array(graph_points[p].estimate())
p.GBA_kf_id = loop_kf_id
num_active_edges = num_edges - num_bad_edges
mean_squared_error = opt.active_chi2() / max(num_active_edges, 1)
print(
f"bundle_adjustment: mean_squared_error: {mean_squared_error}, initial_mean_squared_error: {initial_mean_squared_error}, num_edges: {num_edges}, num_bad_edges: {num_bad_edges} (perc: {num_bad_edges/num_edges*100:.2f}%)"
)
if result_dict is not None:
result_dict["keyframe_updates"] = keyframe_updates
result_dict["point_updates"] = point_updates
如果有其节点和边调用,根据这个思路和位置找到他们的位置。
完整参考代码
"""
* This file is part of PYSLAM
*
* Copyright (C) 2016-present Luigi Freda <luigi dot freda at gmail dot com>
*
* PYSLAM is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* PYSLAM is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with PYSLAM. If not, see <http://www.gnu.org/licenses/>.
"""
import math
import numpy as np
import sys
import time
import cv2
import threading
import multiprocessing as mp
import traceback
from pyslam.config_parameters import (
Parameters,
) # TODO(dvdmc): do we want parameters to be used in this file?
import g2o
from pyslam.semantics.semantic_mapping_shared import (
SemanticMappingShared,
) # TODO(dvdmc): do we want semnatics to be used in this file?
from pyslam.utilities.utils_geom import poseRt, Sim3Pose
from pyslam.utilities.utils_sys import Printer
from pyslam.utilities.utils_mp import MultiprocessingManager
from pyslam.utilities.utils_draw import draw_histogram
from .frame import FeatureTrackerShared
from .map_point import MapPoint
from .keyframe import KeyFrame
# ------------------------------------------------------------------------------------------
# Continuously syncs the g2o.Flag with the shared boolean variable.
def sync_flag_fun(abort_flag, mp_abort_flag, print=print):
print("sync_flag_fun: starting...")
try:
while not abort_flag.value:
# If the flag's value doesn't match the shared_bool, update it
if mp_abort_flag.value != abort_flag.value:
abort_flag.value = mp_abort_flag.value
print(f"sync_flag_fun: Flag updated to: {abort_flag.value}")
time.sleep(0.003)
print("sync_flag_fun: done...")
except Exception as e:
print(f"sync_flag_fun: EXCEPTION: {e}")
traceback_details = traceback.format_exc()
print(f"\t traceback details: {traceback_details}")
# ------------------------------------------------------------------------------------------
# optimize pixel reprojection error, bundle adjustment
def bundle_adjustment(
keyframes,
points,
local_window,
fixed_points=False,
rounds=10,
loop_kf_id=0,
use_robust_kernel=False,
abort_flag=None,
mp_abort_flag=None,
result_dict=None,
verbose=False,
print=print,
):
if local_window is None:
local_frames = keyframes
else:
local_frames = keyframes[-local_window:]
robust_rounds = rounds // 2 if use_robust_kernel else 0
final_rounds = rounds - robust_rounds
print(
f"bundle_adjustment: rounds: {rounds}, robust_rounds: {robust_rounds}, final_rounds: {final_rounds}"
)
if abort_flag is None:
abort_flag = g2o.Flag()
sync_flag_thread = None
if mp_abort_flag is not None:
# Create a thread for keeping abort_flag in sync with mp_abort_flag.
# Why? The g2o-abort-flag passed (via pickling) to a launched parallel process (via multiprocessing module) is just a different instance that is not kept in sync
# with its source instance in the parent process. This means we don't succeed to abort the BA when set the source instance.
sync_flag_thread = threading.Thread(
target=sync_flag_fun, args=(abort_flag, mp_abort_flag, print)
)
sync_flag_thread.daemon = True # Daemonize thread so it exits when the main thread does
sync_flag_thread.start()
# create g2o optimizer
opt = g2o.SparseOptimizer()
# block_solver = g2o.BlockSolverSE3(g2o.LinearSolverCSparseSE3())
block_solver = g2o.BlockSolverSE3(g2o.LinearSolverEigenSE3())
# block_solver = g2o.BlockSolverSE3(g2o.LinearSolverCholmodSE3())
solver = g2o.OptimizationAlgorithmLevenberg(block_solver)
opt.set_algorithm(solver)
opt.set_force_stop_flag(abort_flag)
thHuberMono = math.sqrt(5.991) # chi-square 2 DOFS
thHuberStereo = math.sqrt(7.815) # chi-square 3 DOFS
graph_keyframes, graph_points, graph_edges = {}, {}, {}
# add frame vertices to graph
for kf in (
local_frames if fixed_points else keyframes
): # if points are fixed then consider just the local frames, otherwise we need all frames or at least two frames for each point
if kf.is_bad:
continue
# print('adding vertex frame ', f.id, ' to graph')
se3 = g2o.SE3Quat(kf.Rcw.copy(), kf.tcw.copy())
v_se3 = g2o.VertexSE3Expmap()
v_se3.set_estimate(se3)
v_se3.set_id(kf.kid * 2) # even ids (use f.kid here!)
v_se3.set_fixed(kf.kid == 0 or kf not in local_frames) # (use f.kid here!)
opt.add_vertex(v_se3)
graph_keyframes[kf] = v_se3
num_edges = 0
num_bad_edges = 0
inv_level_sigmas2 = FeatureTrackerShared.feature_manager.inv_level_sigmas2
eye2 = np.eye(2)
eye3 = np.eye(3)
# add point vertices to graph
for p in points:
if p is None or p.is_bad: # do not consider bad points
continue
# if __debug__:
# if not any([f in keyframes for f in p.keyframes()]):
# Printer.red('point without a viewing frame!!')
# continue
# print('adding vertex point ', p.id,' to graph')
v_p = g2o.VertexSBAPointXYZ()
v_p.set_id(p.id * 2 + 1) # odd ids
v_p.set_estimate(p.pt[0:3].copy())
v_p.set_marginalized(True)
v_p.set_fixed(fixed_points)
opt.add_vertex(v_p)
graph_points[p] = v_p
# add edges
for kf, idx in p.observations():
# if kf.is_bad: # redundant since we check kf is in graph_keyframes (selected as non-bad)
# continue
if kf not in graph_keyframes:
continue
kf_kpsu_idx = kf.kpsu[idx]
kf_kps_ur_idx = kf.kps_ur[idx] if kf.kps_ur is not None else -1
# print('adding edge between point ', p.id,' and frame ', f.id)
is_stereo_obs = kf_kps_ur_idx >= 0
invSigma2 = inv_level_sigmas2[kf.octaves[idx]]
if Parameters.kUseSemanticsInOptimization and kf.kps_sem is not None:
invSigma2 *= SemanticMappingShared.get_semantic_weight(kf.kps_sem[idx])
camera = kf.camera
if is_stereo_obs:
edge = g2o.EdgeStereoSE3ProjectXYZ()
edge.set_vertex(0, v_p)
edge.set_vertex(1, graph_keyframes[kf])
obs = [kf_kpsu_idx[0], kf_kpsu_idx[1], kf_kps_ur_idx]
edge.set_measurement(obs)
edge.set_information(eye3 * invSigma2)
if use_robust_kernel:
edge.set_robust_kernel(g2o.RobustKernelHuber(thHuberStereo))
edge.fx = camera.fx
edge.fy = camera.fy
edge.cx = camera.cx
edge.cy = camera.cy
edge.bf = camera.bf
else:
edge = g2o.EdgeSE3ProjectXYZ()
edge.set_vertex(0, v_p)
edge.set_vertex(1, graph_keyframes[kf])
edge.set_measurement(kf_kpsu_idx)
edge.set_information(eye2 * invSigma2)
if use_robust_kernel:
edge.set_robust_kernel(g2o.RobustKernelHuber(thHuberMono))
edge.fx = camera.fx
edge.fy = camera.fy
edge.cx = camera.cx
edge.cy = camera.cy
opt.add_edge(edge)
graph_edges[edge] = is_stereo_obs
num_edges += 1
if abort_flag.value:
return -1, result_dict
if verbose:
opt.set_verbose(True)
chi2Mono = 5.991 # chi-square 2 DOFs
chi2Stereo = 7.815 # chi-square 3 DOFs
opt.initialize_optimization()
opt.compute_active_errors()
initial_mean_squared_error = opt.active_chi2() / max(num_edges, 1)
if robust_rounds > 0:
opt.optimize(robust_rounds)
# check inliers observation
for edge, edge_data in graph_edges.items():
is_stereo = edge_data
edge_chi2 = edge.chi2()
chi2_check_failure = (edge_chi2 > chi2Stereo) if is_stereo else (edge_chi2 > chi2Mono)
if chi2_check_failure or not edge.is_depth_positive():
edge.set_level(1)
num_bad_edges += 1
edge.set_robust_kernel(None)
if abort_flag.value:
return -1, result_dict
opt.initialize_optimization()
opt.optimize(final_rounds)
# shut down the sync thread if used and still running
if sync_flag_thread is not None and sync_flag_thread.is_alive():
abort_flag.value = True # force the sync thread to exit
sync_flag_thread.join() # timeout=0.005)
# if result_dict is not None then fill in the result dictionary
# instead of changing the keyframes and points
keyframe_updates = None
point_updates = None
if result_dict is not None:
keyframe_updates, point_updates = {}, {}
# put frames back
if keyframe_updates is not None:
# store the updates in a dictionary
for kf in graph_keyframes:
est = graph_keyframes[kf].estimate()
R, t = est.rotation().matrix(), est.translation()
T = poseRt(R, t)
keyframe_updates[kf.id] = T
else:
for kf in graph_keyframes:
est = graph_keyframes[kf].estimate()
R, t = est.rotation().matrix(), est.translation()
T = poseRt(R, t)
if loop_kf_id == 0:
# direct update on map
kf.update_pose(T)
else:
# update for loop closure
kf.Tcw_GBA = T
kf.GBA_kf_id = loop_kf_id
# put points back
if not fixed_points:
if point_updates is not None:
# store the updates in a dictionary
for p in graph_points:
point_updates[p.id] = np.array(graph_points[p].estimate())
else:
if loop_kf_id == 0:
for p in graph_points:
# direct update on map
p.update_position(np.array(graph_points[p].estimate()))
p.update_normal_and_depth(force=True)
else:
for p in graph_points:
# update for loop closure
p.pt_GBA = np.array(graph_points[p].estimate())
p.GBA_kf_id = loop_kf_id
num_active_edges = num_edges - num_bad_edges
mean_squared_error = opt.active_chi2() / max(num_active_edges, 1)
print(
f"bundle_adjustment: mean_squared_error: {mean_squared_error}, initial_mean_squared_error: {initial_mean_squared_error}, num_edges: {num_edges}, num_bad_edges: {num_bad_edges} (perc: {num_bad_edges/num_edges*100:.2f}%)"
)
if result_dict is not None:
result_dict["keyframe_updates"] = keyframe_updates
result_dict["point_updates"] = point_updates
return mean_squared_error, result_dict
# ------------------------------------------------------------------------------------------
def global_bundle_adjustment(
keyframes,
points,
rounds=10,
loop_kf_id=0,
use_robust_kernel=False,
abort_flag=None,
mp_abort_flag=None,
result_dict=None,
verbose=False,
print=print,
):
fixed_points = False
mean_squared_error, result_dict = bundle_adjustment(
keyframes,
points,
local_window=None,
fixed_points=fixed_points,
rounds=rounds,
loop_kf_id=loop_kf_id,
use_robust_kernel=use_robust_kernel,
abort_flag=abort_flag,
mp_abort_flag=mp_abort_flag,
result_dict=result_dict,
verbose=verbose,
print=print,
)
return mean_squared_error, result_dict
def global_bundle_adjustment_map(
map,
rounds=10,
loop_kf_id=0,
use_robust_kernel=False,
abort_flag=None,
mp_abort_flag=None,
result_dict=None,
verbose=False,
print=print,
):
# fixed_points=False
keyframes = map.get_keyframes()
points = map.get_points()
return global_bundle_adjustment(
keyframes=keyframes,
points=points,
rounds=rounds,
loop_kf_id=loop_kf_id,
use_robust_kernel=use_robust_kernel,
abort_flag=abort_flag,
mp_abort_flag=mp_abort_flag,
result_dict=result_dict,
verbose=verbose,
print=print,
)
# ------------------------------------------------------------------------------------------
# optimize points reprojection error:
# - frame pose is optimized
# - 3D points observed in frame are considered fixed
# output:
# - mean_squared_error
# - is_ok: is the pose optimization successful?
# - num_valid_points: number of inliers detected by the optimization
# N.B.: access frames from tracking thread, no need to lock frame fields
def pose_optimization(frame, verbose=False, rounds=10):
is_ok = True
# create g2o optimizer
opt = g2o.SparseOptimizer()
# block_solver = g2o.BlockSolverSE3(g2o.LinearSolverCSparseSE3())
# block_solver = g2o.BlockSolverSE3(g2o.LinearSolverDenseSE3())
block_solver = g2o.BlockSolverSE3(g2o.LinearSolverEigenSE3())
solver = g2o.OptimizationAlgorithmLevenberg(block_solver)
opt.set_algorithm(solver)
thHuberMono = math.sqrt(5.991) # chi-squared 2 DOFS
thHuberStereo = math.sqrt(7.815) # chi-squared 3 DOFS
point_edge_pairs = {}
num_point_edges = 0
Rcw = frame.Rcw
tcw = frame.tcw
v_se3 = g2o.VertexSE3Expmap()
v_se3.set_estimate(g2o.SE3Quat(Rcw.copy(), tcw.copy()))
v_se3.set_id(0)
v_se3.set_fixed(False)
opt.add_vertex(v_se3)
inv_level_sigmas2 = FeatureTrackerShared.feature_manager.inv_level_sigmas2
eye2 = np.eye(2)
eye3 = np.eye(3)
fx = frame.camera.fx
fy = frame.camera.fy
cx = frame.camera.cx
cy = frame.camera.cy
bf = frame.camera.bf
with MapPoint.global_lock:
# add point vertices to graph
for idx, p in enumerate(frame.points):
if p is None:
continue
frame_kpsu_idx = frame.kpsu[idx]
frame_kps_ur_idx = frame.kps_ur[idx] if frame.kps_ur is not None else -1
# reset outlier flag
frame.outliers[idx] = False
is_stereo_obs = frame_kps_ur_idx >= 0
# add edge
edge = None
invSigma2 = inv_level_sigmas2[frame.octaves[idx]]
if Parameters.kUseSemanticsInOptimization and frame.kps_sem is not None:
invSigma2 *= SemanticMappingShared.get_semantic_weight(frame.kps_sem[idx])
if is_stereo_obs:
# print('adding stereo edge between point ', p.id,' and frame ', frame.id)
edge = g2o.EdgeStereoSE3ProjectXYZOnlyPose()
obs = [frame_kpsu_idx[0], frame_kpsu_idx[1], frame_kps_ur_idx] # u,v,ur
edge.set_vertex(0, v_se3) # opt.vertex(0))
edge.set_measurement(obs)
edge.set_information(eye3 * invSigma2)
edge.set_robust_kernel(g2o.RobustKernelHuber(thHuberStereo))
edge.fx = fx
edge.fy = fy
edge.cx = cx
edge.cy = cy
edge.bf = bf
edge.Xw = p.pt[0:3]
else:
# print('adding mono edge between point ', p.id,' and frame ', frame.id)
edge = g2o.EdgeSE3ProjectXYZOnlyPose()
edge.set_vertex(0, v_se3) # opt.vertex(0))
edge.set_measurement(frame_kpsu_idx)
edge.set_information(eye2 * invSigma2)
edge.set_robust_kernel(g2o.RobustKernelHuber(thHuberMono))
edge.fx = fx
edge.fy = fy
edge.cx = cx
edge.cy = cy
edge.Xw = p.pt[0:3]
opt.add_edge(edge)
point_edge_pairs[p] = (edge, idx, is_stereo_obs) # one edge per point
num_point_edges += 1
if num_point_edges < 3:
Printer.red("pose_optimization: not enough correspondences!")
is_ok = False
return 0, is_ok, 0
if verbose:
opt.set_verbose(True)
# perform 4 optimizations:
# after each optimization we classify observation as inlier/outlier;
# at the next optimization, outliers are not included, but at the end they can be classified as inliers again
chi2Mono = 5.991 # chi-squared 2 DOFs
chi2Stereo = 7.815 # chi-squared 3 DOFs
num_bad_point_edges = 0
for it in range(4):
v_se3.set_estimate(g2o.SE3Quat(Rcw.copy(), tcw.copy()))
opt.initialize_optimization()
opt.optimize(rounds)
num_bad_point_edges = 0
for p, (edge, idx, is_stereo_obs) in point_edge_pairs.items():
if frame.outliers[idx]:
edge.compute_error()
chi2 = edge.chi2()
# is_stereo_obs = frame.kps_ur is not None and frame.kps_ur[idx]>=0
chi2_check_failure = (chi2 > chi2Stereo) if is_stereo_obs else (chi2 > chi2Mono)
if chi2_check_failure:
frame.outliers[idx] = True
edge.set_level(1)
num_bad_point_edges += 1
else:
frame.outliers[idx] = False
edge.set_level(0)
if it == 2:
edge.set_robust_kernel(None)
if len(opt.edges()) < 10:
Printer.red("pose_optimization: stopped - not enough edges!")
# is_ok = False
break
print(
f"pose optimization: available {num_point_edges} points, found {num_bad_point_edges} bad points"
)
num_valid_points = (
num_point_edges - num_bad_point_edges
) # len([e for e in opt.edges() if e.level() == 0])
if num_valid_points < 10:
Printer.red("pose_optimization: not enough edges!")
is_ok = False
ratio_bad_points = num_bad_point_edges / max(num_point_edges, 1)
if num_valid_points > 15 and ratio_bad_points > Parameters.kMaxOutliersRatioInPoseOptimization:
Printer.red(
f"pose_optimization: percentage of bad points is too high: {ratio_bad_points*100:.2f}%"
)
is_ok = False
# update pose estimation
if is_ok:
est = v_se3.estimate()
R = est.rotation().matrix()
t = est.translation()
frame.update_pose(poseRt(R, t))
draw_chi2_histograms = False # debug and visualization of chi2 values
if draw_chi2_histograms:
chi2_mono_vals = []
chi2_stereo_vals = []
for p, (edge, idx, is_stereo_obs) in point_edge_pairs.items():
chi2 = edge.chi2()
if is_stereo_obs:
chi2_stereo_vals.append(chi2)
else:
chi2_mono_vals.append(chi2)
# Draw and show histograms
if chi2_mono_vals:
hist_img_mono = draw_histogram(
chi2_mono_vals,
bins=10,
delta=chi2Mono,
min_value=0,
max_value=chi2Mono * 10,
color=(255, 0, 0),
)
cv2.imshow("Monocular chi2 errors", hist_img_mono)
if chi2_stereo_vals:
hist_img_stereo = draw_histogram(
chi2_stereo_vals,
bins=10,
delta=chi2Stereo,
min_value=0,
max_value=chi2Stereo * 10,
color=(0, 255, 0),
)
cv2.imshow("Stereo chi2 errors", hist_img_stereo)
cv2.waitKey(1)
# since we have only one frame here, each edge corresponds to a single distinct point
# num_valid_points = num_point_edges - num_bad_point_edges
mean_squared_error = opt.active_chi2() / max(num_valid_points, 1)
return mean_squared_error, is_ok, num_valid_points
# ------------------------------------------------------------------------------------------
# local bundle adjustment (optimize points reprojection error)
# - frames and points are optimized
# - frames_ref are fixed
def local_bundle_adjustment(
keyframes: list[KeyFrame],
points: list[MapPoint],
keyframes_ref: list[KeyFrame] = [],
fixed_points: bool = False,
verbose: bool = False,
rounds: int = 10,
abort_flag: g2o.Flag = g2o.Flag(),
mp_abort_flag=None,
map_lock=None,
):
from .local_mapping import LocalMapping
print = LocalMapping.print
# create g2o optimizer
opt = g2o.SparseOptimizer()
# block_solver = g2o.BlockSolverSE3(g2o.LinearSolverCSparseSE3())
block_solver = g2o.BlockSolverSE3(g2o.LinearSolverEigenSE3())
# block_solver = g2o.BlockSolverSE3(g2o.LinearSolverCholmodSE3())
solver = g2o.OptimizationAlgorithmLevenberg(block_solver)
opt.set_algorithm(solver)
opt.set_force_stop_flag(abort_flag)
good_keyframes = [kf for kf in keyframes if not kf.is_bad] + [
kf for kf in keyframes_ref if not kf.is_bad
]
good_points = [
p for p in points if p is not None and not p.is_bad
] # and any(f in keyframes for f in p.keyframes())]
thHuberMono = math.sqrt(5.991) # chi-square 2 DOFS
thHuberStereo = math.sqrt(7.815) # chi-square 3 DOFS
graph_keyframes, graph_points, graph_edges = {}, {}, {}
# add frame vertices to graph
for kf in good_keyframes:
# print('adding vertex frame ', f.id, ' to graph')
se3 = g2o.SE3Quat(kf.Rcw.copy(), kf.tcw.copy())
v_se3 = g2o.VertexSE3Expmap()
v_se3.set_estimate(se3)
v_se3.set_id(kf.kid * 2) # even ids (use f.kid here!)
v_se3.set_fixed(kf.kid == 0 or kf in keyframes_ref) # (use f.kid here!)
opt.add_vertex(v_se3)
graph_keyframes[kf] = v_se3
num_edges = 0
num_bad_edges = 0
eye2 = np.eye(2)
eye3 = np.eye(3)
inv_level_sigmas2 = FeatureTrackerShared.feature_manager.inv_level_sigmas2
# add point vertices to graph
# for p in points:
for p in good_points:
# assert(p is not None)
# if p.is_bad: # do not consider bad points
# continue
# if not any([f in keyframes for f in p.keyframes()]):
# Printer.orange('point %d without a viewing keyframe in input keyframes!!' %(p.id))
# #Printer.orange(' keyframes: ',p.observations_string())
# continue
# print('adding vertex point ', p.id,' to graph')
v_p = g2o.VertexSBAPointXYZ()
v_p.set_id(p.id * 2 + 1) # odd ids
v_p.set_estimate(p.pt[0:3].copy())
v_p.set_marginalized(True)
v_p.set_fixed(fixed_points)
opt.add_vertex(v_p)
graph_points[p] = v_p
# add edges
good_observations = [
(kf, p_idx) for kf, p_idx in p.observations() if not kf.is_bad and kf in graph_keyframes
]
# for kf, p_idx in p.observations():
for kf, p_idx in good_observations:
# if kf.is_bad:
# continue
# if kf not in graph_keyframes:
# continue
if __debug__:
p_f = kf.get_point_match(p_idx)
if p_f != p:
print("frame: ", kf.id, " missing point ", p.id, " at index p_idx: ", p_idx)
if p_f is not None:
print("p_f:", p_f)
print("p:", p)
assert kf.get_point_match(p_idx) is p
# print('adding edge between point ', p.id,' and frame ', f.id)
kf_kpsu_p_idx = kf.kpsu[p_idx]
kf_kps_ur_p_idx = kf.kps_ur[p_idx] if kf.kps_ur is not None else -1
is_stereo_obs = kf_kps_ur_p_idx >= 0
invSigma2 = inv_level_sigmas2[kf.octaves[p_idx]]
if Parameters.kUseSemanticsInOptimization and kf.kps_sem is not None:
invSigma2 *= SemanticMappingShared.get_semantic_weight(kf.kps_sem[p_idx])
camera = kf.camera
if is_stereo_obs:
edge = g2o.EdgeStereoSE3ProjectXYZ()
obs = [kf_kpsu_p_idx[0], kf_kpsu_p_idx[1], kf_kps_ur_p_idx]
edge.set_measurement(obs)
edge.set_information(eye3 * invSigma2)
edge.set_robust_kernel(g2o.RobustKernelHuber(thHuberStereo))
edge.bf = camera.bf
else:
edge = g2o.EdgeSE3ProjectXYZ()
edge.set_measurement(kf_kpsu_p_idx)
edge.set_information(eye2 * invSigma2)
edge.set_robust_kernel(g2o.RobustKernelHuber(thHuberMono))
edge.fx, edge.fy, edge.cx, edge.cy = camera.fx, camera.fy, camera.cx, camera.cy
edge.set_vertex(0, v_p)
edge.set_vertex(1, graph_keyframes[kf])
opt.add_edge(edge)
graph_edges[edge] = (p, kf, p_idx, is_stereo_obs) # one has kf.points[p_idx] == p
num_edges += 1
if verbose:
opt.set_verbose(True)
if abort_flag.value:
return -1, 0
print(
f"local_bundle_adjustment: starting optimization with {len(graph_keyframes)} keyframes, {len(graph_points)} points, {num_edges} edges"
)
# initial optimization
opt.initialize_optimization()
opt.optimize(5)
chi2Mono = 5.991 # chi-square 2 DOFs
chi2Stereo = 7.815 # chi-square 3 DOFs
if not abort_flag.value:
# check inliers observation
for edge, edge_data in graph_edges.items():
p, kf, p_idx, is_stereo = edge_data
# if p.is_bad: # redundant check since the considered points come from good_points
# continue
edge_chi2 = edge.chi2()
chi2_check_failure = (edge_chi2 > chi2Stereo) if is_stereo else (edge_chi2 > chi2Mono)
if chi2_check_failure or not edge.is_depth_positive():
edge.set_level(1)
num_bad_edges += 1
edge.set_robust_kernel(None)
# optimize again without outliers
opt.initialize_optimization()
opt.optimize(rounds)
# search for final outlier observations and clean map
num_bad_observations = 0 # final bad observations
outliers_edge_data = []
chi2_limits = {True: chi2Stereo, False: chi2Mono}
for edge, edge_data in graph_edges.items():
p, kf, p_idx, is_stereo = edge_data
# if p.is_bad: # redundant check since the considered points come from good_points
# continue
assert kf.get_point_match(p_idx) is p
if edge.chi2() > chi2_limits[is_stereo] or not edge.is_depth_positive():
num_bad_observations += 1
outliers_edge_data.append(edge_data)
if map_lock is None:
map_lock = threading.RLock() # put a fake lock
with map_lock:
# remove outlier observations
for p, kf, p_idx, is_stereo in outliers_edge_data:
p_f = kf.get_point_match(p_idx)
if p_f is not None:
assert p_f is p
p.remove_observation(kf, p_idx)
# the following instruction is now included in p.remove_observation()
# f.remove_point(p) # it removes multiple point instances (if these are present)
# f.remove_point_match(p_idx) # this does not remove multiple point instances, but now there cannot be multiple instances any more
# put frames back
for kf in graph_keyframes:
est = graph_keyframes[kf].estimate()
R = est.rotation().matrix()
t = est.translation()
kf.update_pose(poseRt(R, t))
kf.lba_count += 1
# kf.update_pose(g2o.Isometry3d(est.orientation(), est.position()))
# put points back
if not fixed_points:
for p in graph_points:
p.update_position(np.array(graph_points[p].estimate()))
p.update_normal_and_depth(force=True)
num_active_edges = num_edges - num_bad_edges
mean_squared_error = opt.active_chi2() / max(num_active_edges, 1)
return mean_squared_error, num_bad_observations / max(num_edges, 1)
# ------------------------------------------------------------------------------------------
# Parallel local bundle adjustment (optimize points reprojection error)
# - frames and points are optimized
# - frames_ref are fixed
# This function will handle the multiprocessing part of the optimization.
# it is launched by local_bundle_adjustment_parallel()
def lba_optimization_process(
result_dict_queue,
queue,
good_keyframes,
keyframes_ref,
good_points,
fixed_points,
verbose,
rounds,
mp_abort_flag,
):
from .local_mapping import LocalMapping
print = LocalMapping.print
try:
print("lba_optimization_process: starting...")
abort_flag = g2o.Flag(False)
# Create a thread for keeping abort_flag in sync with mp_abort_flag.
# Why? The g2o-abort-flag passed (via pickling) to this launched parallel process (via multiprocessing module) is just a different instance that is not kept in sync
# with its source instance in the main/parent process. This means we don't succeed to abort the LBA when a new keyframes is pushed to local mapping.
sync_flag_thread = threading.Thread(
target=sync_flag_fun, args=(abort_flag, mp_abort_flag, print)
)
sync_flag_thread.daemon = True # Daemonize thread so it exits when the main thread does
sync_flag_thread.start()
# create g2o optimizer
opt = g2o.SparseOptimizer()
# block_solver = g2o.BlockSolverSE3(g2o.LinearSolverCSparseSE3())
block_solver = g2o.BlockSolverSE3(g2o.LinearSolverEigenSE3())
# block_solver = g2o.BlockSolverSE3(g2o.LinearSolverCholmodSE3())
solver = g2o.OptimizationAlgorithmLevenberg(block_solver)
opt.set_algorithm(solver)
opt.set_force_stop_flag(abort_flag)
graph_keyframes, graph_points, graph_edges = {}, {}, {}
# add frame vertices to graph
for kf in good_keyframes.values():
# print('adding vertex frame ', f.id, ' to graph')
se3 = g2o.SE3Quat(kf.Rcw.copy(), kf.tcw.copy())
v_se3 = g2o.VertexSE3Expmap()
v_se3.set_estimate(se3)
v_se3.set_id(kf.kid * 2) # even ids (use f.kid here!)
v_se3.set_fixed(kf.kid == 0 or kf in keyframes_ref) # (use f.kid here!)
opt.add_vertex(v_se3)
graph_keyframes[kf] = v_se3
thHuberMono = math.sqrt(5.991) # chi-square 2 DOFS
thHuberStereo = math.sqrt(7.815) # chi-square 3 DOFS
num_edges = 0
num_bad_edges = 0
eye2 = np.eye(2)
eye3 = np.eye(3)
inv_level_sigmas2 = FeatureTrackerShared.feature_manager.inv_level_sigmas2
# Add point vertices to the graph
for p in good_points:
v_p = g2o.VertexSBAPointXYZ()
v_p.set_id(p.id * 2 + 1)
v_p.set_estimate(p.pt[0:3].copy())
v_p.set_marginalized(True)
v_p.set_fixed(fixed_points)
opt.add_vertex(v_p)
graph_points[p] = v_p
# add edges
good_observations = [
(kf, p_idx)
for kf, p_idx in p.observations()
if not kf.is_bad and kf in graph_keyframes
]
for kf, p_idx in good_observations:
if __debug__:
p_f = kf.get_point_match(p_idx)
if p_f != p:
print("frame: ", kf.id, " missing point ", p.id, " at index p_idx: ", p_idx)
if p_f is not None:
print("p_f:", p_f)
print("p:", p)
assert kf.get_point_match(p_idx) is p
# print('adding edge between point ', p.id,' and frame ', f.id)
kf_kpsu_p_idx = kf.kpsu[p_idx]
kf_kps_ur_p_idx = kf.kps_ur[p_idx] if kf.kps_ur is not None else -1
is_stereo_obs = kf_kps_ur_p_idx >= 0
invSigma2 = inv_level_sigmas2[kf.octaves[p_idx]]
if Parameters.kUseSemanticsInOptimization and kf.kps_sem is not None:
invSigma2 *= SemanticMappingShared.get_semantic_weight(kf.kps_sem[p_idx])
if is_stereo_obs:
edge = g2o.EdgeStereoSE3ProjectXYZ()
obs = [kf_kpsu_p_idx[0], kf_kpsu_p_idx[1], kf_kps_ur_p_idx]
edge.set_measurement(obs)
edge.set_information(eye3 * invSigma2)
edge.set_robust_kernel(g2o.RobustKernelHuber(thHuberStereo))
edge.bf = kf.camera.bf
else:
edge = g2o.EdgeSE3ProjectXYZ()
edge.set_measurement(kf_kpsu_p_idx)
edge.set_information(eye2 * invSigma2)
edge.set_robust_kernel(g2o.RobustKernelHuber(thHuberMono))
edge.fx, edge.fy, edge.cx, edge.cy = (
kf.camera.fx,
kf.camera.fy,
kf.camera.cx,
kf.camera.cy,
)
edge.set_vertex(0, v_p)
edge.set_vertex(1, graph_keyframes[kf])
opt.add_edge(edge)
graph_edges[edge] = (p, kf, p_idx, is_stereo_obs)
num_edges += 1
if verbose:
opt.set_verbose(True)
print("lba_optimization_process: created opt...")
result_dict = {"mean_squared_error": -1, "ratio_bad_observations": 0}
if abort_flag.value:
print("lba_optimization_process - aborting optimization")
result_dict_queue.put(result_dict)
queue.put("aborted")
return
# Initial optimization
opt.initialize_optimization()
opt.optimize(5)
print("lba_optimization_process: done optimize(5)...")
chi2Mono = 5.991 # chi-square 2 DOFs
chi2Stereo = 7.815 # chi-square 3 DOFs
if not abort_flag.value:
# check inliers observation
for edge, edge_data in graph_edges.items():
p, kf, p_idx, is_stereo = edge_data
# if p.is_bad: # redundant check since the considered points come from good_points
# continue
edge_chi2 = edge.chi2()
chi2_check_failure = (
(edge_chi2 > chi2Stereo) if is_stereo else (edge_chi2 > chi2Mono)
)
if chi2_check_failure or not edge.is_depth_positive():
edge.set_level(1)
num_bad_edges += 1
edge.set_robust_kernel(None)
# optimize again without outliers
opt.initialize_optimization()
opt.optimize(rounds)
print("lba_optimization_process: done optimize(rounds)...")
print("lba_optimization_process: searching for outliers...")
# search for final outlier observations and clean map
num_bad_observations = 0 # final bad observations
outliers_edge_data = []
chi2_limits = {True: chi2Stereo, False: chi2Mono}
for edge, edge_data in graph_edges.items():
p, kf, p_idx, is_stereo = edge_data
# if p.is_bad: # redundant check since the considered points come from good_points
# continue
assert kf.get_point_match(p_idx) is p
if edge.chi2() > chi2_limits[is_stereo] or not edge.is_depth_positive():
num_bad_observations += 1
outliers_edge_data.append(edge_data)
num_active_edges = num_edges - num_bad_edges
mean_squared_error = opt.active_chi2() / max(num_active_edges, 1)
print("lba_optimization_process: preparing results ...")
if sync_flag_thread.is_alive():
abort_flag.value = True # force the sync thread to exit
sync_flag_thread.join(timeout=0.005)
# Final results: keyframe poses and point positions
keyframe_poses = {
kf.kid: poseRt(
graph_keyframes[kf].estimate().rotation().matrix(),
graph_keyframes[kf].estimate().translation(),
)
for kf in graph_keyframes
}
point_positions = {p.id: graph_points[p].estimate() for p in graph_points}
outliers_edge_data_out = [(p_idx, kf.kid) for p, kf, p_idx, is_stereo in outliers_edge_data]
result_dict["keyframe_poses"] = keyframe_poses
result_dict["point_positions"] = point_positions
result_dict["outliers_edge_data_out"] = outliers_edge_data_out
result_dict["mean_squared_error"] = mean_squared_error
result_dict["ratio_bad_observations"] = num_bad_observations / max(num_edges, 1)
result_dict_queue.put(result_dict)
queue.put("finished")
print("lba_optimization_process: completed")
except Exception as e:
Printer.red(f"lba_optimization_process: EXCEPTION: {e} !!!")
print(f"lba_optimization_process: EXCEPTION: {e} !!!")
traceback_details = traceback.format_exc()
print(f"\t traceback details: {traceback_details}")
result_dict_queue.put(result_dict)
def local_bundle_adjustment_parallel(
keyframes,
points,
keyframes_ref=[],
fixed_points=False,
verbose=False,
rounds=10,
abort_flag=g2o.Flag(),
mp_abort_flag=None,
map_lock=None,
):
from .local_mapping import LocalMapping
print = LocalMapping.print
# NOTE: we need a keyframe map (kf.id->kf) in order to be able retrieve and discard the outlier-edge keyframes after optimization
good_keyframes = {kf.kid: kf for kf in keyframes if not kf.is_bad}
good_keyframes.update({kf.kid: kf for kf in keyframes_ref if not kf.is_bad})
good_points = [
p for p in points if p is not None and not p.is_bad
] # and any(f in keyframes for f in p.keyframes())]
# NOTE: We use the MultiprocessingManager to manage queues and avoid pickling problems with multiprocessing.
mp_manager = MultiprocessingManager()
queue = mp_manager.Queue()
result_dict_queue = mp_manager.Queue()
# Start the optimization process in parallel
p = mp.Process(
target=lba_optimization_process,
args=(
result_dict_queue,
queue,
good_keyframes,
keyframes_ref,
good_points,
fixed_points,
verbose,
rounds,
mp_abort_flag,
),
)
# p.daemon = True
p.start()
print("local_bundle_adjustment_parallel - started")
# HACK: for some reasons, p.join() hangs out once in a while (even after the last print). We terminate the process here once we receive an end-signal message.
# p.join()
message = queue.get() # blocking call
if p.is_alive():
p.terminate()
print("local_bundle_adjustment_parallel - joined")
try:
if result_dict_queue.qsize() == 0:
print("local_bundle_adjustment_parallel - result_dict_queue is empty")
result_dict = {"mean_squared_error": -1, "ratio_bad_observations": 0}
else:
result_dict = result_dict_queue.get()
if result_dict["mean_squared_error"] != -1:
# Extract the keyframe poses and point positions
keyframe_poses = result_dict["keyframe_poses"]
point_positions = result_dict["point_positions"]
outliers_edge_data_out = result_dict["outliers_edge_data_out"]
# Update the main process map with the new poses and point positions
if map_lock is None:
map_lock = threading.RLock()
with map_lock:
# remove outlier observations
for p_idx, kf_kid in outliers_edge_data_out:
kf = good_keyframes[kf_kid]
p_f = kf.get_point_match(p_idx)
if p_f is not None:
assert p_f.id == p_idx
p_f.remove_observation(kf, p_idx)
# the following instruction is now included in p.remove_observation()
# f.remove_point(p) # it removes multiple point instances (if these are present)
# f.remove_point_match(p_idx) # this does not remove multiple point instances, but now there cannot be multiple instances any more
# put frames back
for kf in good_keyframes.values():
# if kf.kid in keyframe_poses:
# kf.update_pose(keyframe_poses[kf.kid])
try:
kf.update_pose(keyframe_poses[kf.kid])
kf.lba_count += 1
except:
Printer.red(f"Missing pose for keyframe {kf.kid}")
pass # kf.kid is not in keyframe_poses
# put points back
if not fixed_points:
for p in good_points:
if p is not None:
# if p.id in point_positions:
# p.update_position(np.array(point_positions[p.id]))
# p.update_normal_and_depth(force=True)
try:
p.update_position(np.array(point_positions[p.id]))
p.update_normal_and_depth(force=True)
except:
pass # p.id is not in point_positions
# Return success indicator
return result_dict["mean_squared_error"], result_dict["ratio_bad_observations"]
else:
Printer.red(f"local_bundle_adjustment_parallel - error: {result_dict}")
return -1, 0
except Exception as e:
Printer.red(f"local_bundle_adjustment_parallel - error: {result_dict}")
print(f"local_bundle_adjustment_parallel - EXCEPTION: {e}")
traceback_details = traceback.format_exc()
print(f"\t traceback details: {traceback_details}")
return -1, 0
# ------------------------------------------------------------------------------------------
# The goal of this function is to estimate the Sim(3) transformation (R12,t12,s12)
# between two keyframes (kf1 and kf2) and their 3D matched map points in a SLAM system.
# This optimization compute the Sim(3) transformation that minimizes the reprojection errors
# of the 3D matched map points of kf1 into kf2 and the reprojection errors of the
# 3D matched map points of kf2 into kf1.
# map_point_matches12[i] = map point of kf2 matched with i-th map point of kf1 (from 1 to 2)
# out: num_inliers, R12, t12, s12
def optimize_sim3(
kf1: KeyFrame,
kf2: KeyFrame,
map_points1,
map_point_matches12,
R12,
t12,
s12,
th2: float,
fix_scale: bool,
verbose: bool = False,
) -> int:
from pyslam.loop_closing.loop_detector_base import LoopDetectorBase
print = LoopDetectorBase.print
# Calibration and Camera Poses
cam1 = kf1.camera
cam2 = kf2.camera
R1w, t1w = kf1.Rcw.copy(), kf1.tcw.copy()
R2w, t2w = kf2.Rcw.copy(), kf2.tcw.copy()
optimizer = g2o.SparseOptimizer()
solver = g2o.BlockSolverX(g2o.LinearSolverDenseX())
algorithm = g2o.OptimizationAlgorithmLevenberg(solver)
optimizer.set_algorithm(algorithm)
sim3 = g2o.Sim3(R12.copy(), t12.ravel().copy(), s12)
# Sim3 vertex
sim3_vertex = g2o.VertexSim3Expmap()
sim3_vertex.set_estimate(sim3)
sim3_vertex.set_id(0)
sim3_vertex.set_fixed(False)
sim3_vertex._fix_scale = fix_scale
sim3_vertex._principle_point1 = np.array([cam1.cx, cam1.cy])
sim3_vertex._focal_length1 = np.array([cam1.fx, cam1.fy])
sim3_vertex._principle_point2 = np.array([cam2.cx, cam2.cy])
sim3_vertex._focal_length2 = np.array([cam2.fx, cam2.fy])
optimizer.add_vertex(sim3_vertex)
# MapPoint vertices and edges
if map_points1 is None:
map_points1 = kf1.get_points()
num_matches = len(map_point_matches12)
assert num_matches == len(map_points1)
if verbose:
print(f"optimize_sim3: num_matches = {num_matches}")
edges_12 = []
edges_21 = []
vertex_indices = []
delta_huber = np.sqrt(th2)
inv_level_sigmas2 = FeatureTrackerShared.feature_manager.inv_level_sigmas2
eye2 = np.eye(2)
num_correspondences = 0
for i in range(num_matches):
mp1 = map_points1[i]
if mp1 is None or mp1.is_bad:
continue
mp2 = map_point_matches12[i] # map point of kf2 matched with i-th map point of kf1
if mp2 is None or mp2.is_bad:
continue
vertex_id1 = 2 * i + 1
vertex_id2 = 2 * (i + 1)
index2 = mp2.get_observation_idx(kf2)
if index2 >= 0:
# Create and set vertex for map point 1 (fixed)
v_mp1 = g2o.VertexSBAPointXYZ()
v_mp1.set_estimate(R1w @ mp1.pt + t1w)
v_mp1.set_id(vertex_id1)
v_mp1.set_fixed(True)
optimizer.add_vertex(v_mp1)
# Create and set vertex for map point 2 (fixed)
v_mp2 = g2o.VertexSBAPointXYZ()
v_mp2.set_estimate(R2w @ mp2.pt + t2w)
v_mp2.set_id(vertex_id2)
v_mp2.set_fixed(True)
optimizer.add_vertex(v_mp2)
# Create and set edge 12 (project mp2_2 on camera 1 by using sim3(R12, t12, s12) to transform mp2_2 in mp2_1)
edge_12 = g2o.EdgeSim3ProjectXYZ()
edge_12.set_vertex(0, optimizer.vertex(vertex_id2))
edge_12.set_vertex(1, optimizer.vertex(0))
edge_12.set_measurement(kf1.kpsu[i])
invSigma2_12 = inv_level_sigmas2[kf1.octaves[i]]
if Parameters.kUseSemanticsInOptimization and kf1.kps_sem is not None:
invSigma2_12 *= SemanticMappingShared.get_semantic_weight(kf1.kps_sem[i])
edge_12.set_information(eye2 * invSigma2_12)
edge_12.set_robust_kernel(g2o.RobustKernelHuber(delta_huber))
optimizer.add_edge(edge_12)
# Create and set edge 21 (project mp1_1 on camera 2 by using sim3(R21, t21, s21).inverse() to transform mp1_1 in mp1_2)
edge_21 = g2o.EdgeInverseSim3ProjectXYZ()
edge_21.set_vertex(0, optimizer.vertex(vertex_id1))
edge_21.set_vertex(1, optimizer.vertex(0))
edge_21.set_measurement(kf2.kpsu[index2])
invSigma2_21 = inv_level_sigmas2[kf2.octaves[index2]]
if Parameters.kUseSemanticsInOptimization and kf2.kps_sem is not None:
invSigma2_21 *= SemanticMappingShared.get_semantic_weight(kf2.kps_sem[index2])
edge_21.set_information(eye2 * invSigma2_21)
edge_21.set_robust_kernel(g2o.RobustKernelHuber(delta_huber))
optimizer.add_edge(edge_21)
edges_12.append(edge_12)
edges_21.append(edge_21)
vertex_indices.append(i)
num_correspondences += 1
if verbose:
print(f"optimize_sim3: num_correspondences = {num_correspondences}")
# Optimize
optimizer.initialize_optimization()
if verbose:
optimizer.set_verbose(True)
optimizer.optimize(5)
err = optimizer.active_chi2()
# Check inliers
num_bad = 0
for i, edge_12 in enumerate(edges_12):
edge_21 = edges_21[i]
if (
edge_12.chi2() > th2
or not edge_12.is_depth_positive()
or edge_21.chi2() > th2
or not edge_21.is_depth_positive()
):
index = vertex_indices[i]
map_points1[index] = None
optimizer.remove_edge(edge_12)
optimizer.remove_edge(edge_21)
edges_12[i] = None
edges_21[i] = None
num_bad += 1
num_more_iterations = 10 if num_bad > 0 else 5
if num_correspondences - num_bad < 10:
print(
f"optimize_sim3: Too few inliers, num_correspondences = {num_correspondences}, num_bad = {num_bad}"
)
return 0, None, None, None, 0 # num_inliers, R,t,scale, delta_err
# Optimize again with inliers
optimizer.initialize_optimization()
optimizer.optimize(num_more_iterations)
delta_err = (
optimizer.active_chi2() - err
) # this must be negative to get a good optimization (optimizer.active_chi2() < err)
num_inliers = 0
for i, edge_12 in enumerate(edges_12):
edge_21 = edges_21[i]
if (
edge_12 and edge_21
): # we need to check for Nones potentially set by the first inlier check
if (
edge_12.chi2() > th2
or not edge_12.is_depth_positive()
or edge_21.chi2() > th2
or not edge_21.is_depth_positive()
):
index = vertex_indices[i]
map_points1[index] = None
else:
num_inliers += 1
# Recover optimized Sim3
sim3_vertex_recov = optimizer.vertex(0)
sim3 = sim3_vertex_recov.estimate()
return num_inliers, sim3.rotation().matrix(), sim3.translation(), sim3.scale(), delta_err
# ------------------------------------------------------------------------------------------
def optimize_essential_graph(
map_object,
loop_keyframe: KeyFrame,
current_keyframe: KeyFrame,
non_corrected_sim3_map,
corrected_sim3_map,
loop_connections,
fix_scale: bool,
print_fun=print,
verbose=False,
):
# Setup optimizer
optimizer = g2o.SparseOptimizer()
optimizer.set_verbose(False)
linear_solver = g2o.LinearSolverEigenSim3()
solver = g2o.BlockSolverSim3(linear_solver)
algorithm = g2o.OptimizationAlgorithmLevenberg(solver)
algorithm.set_user_lambda_init(1e-16)
optimizer.set_algorithm(algorithm)
all_keyframes = map_object.get_keyframes()
all_map_points = map_object.get_points()
max_keyframe_id = map_object.max_keyframe_id
vec_Scw = [None] * (max_keyframe_id + 1) # use keyframe kid as index here
vec_corrected_Swc = [None] * (max_keyframe_id + 1) # use keyframe kid as index here
# vertices = [None] * (max_keyframe_id + 1) # use keyframe kid as index here
min_number_features = 100
# Set KeyFrame vertices
for keyframe in all_keyframes:
if keyframe.is_bad:
continue
vertex_sim3 = g2o.VertexSim3Expmap()
keyframe_id = keyframe.kid
try: # if keyframe in corrected_sim3_map:
corrected_sim3 = corrected_sim3_map[keyframe]
Siw = Sim3Pose(R=corrected_sim3.R.copy(), t=corrected_sim3.t.copy(), s=corrected_sim3.s)
except:
Siw = Sim3Pose(keyframe.Rcw.copy(), keyframe.tcw.copy(), 1.0)
vec_Scw[keyframe_id] = Siw
vertex_sim3.set_estimate(g2o.Sim3(Siw.R, Siw.t.ravel(), Siw.s))
if keyframe == loop_keyframe:
vertex_sim3.set_fixed(True)
vertex_sim3.set_id(keyframe_id)
vertex_sim3.set_marginalized(False)
vertex_sim3._fix_scale = fix_scale
optimizer.add_vertex(vertex_sim3)
# vertices[keyframe_id] = vertex_sim3
num_graph_edges = 0
inserted_loop_edges = set() # set of pairs (keyframe_id, connected_keyframe_id)
mat_lambda = np.identity(7)
# Set loop edges
for keyframe, connections in loop_connections.items():
keyframe_id = keyframe.kid
Siw = vec_Scw[keyframe_id]
if Siw is None:
Printer.orange(f"[optimize_essential_graph] SiW for keyframe {keyframe_id} is None")
continue
Swi = Siw.inverse()
for connected_keyframe in connections:
connected_id = connected_keyframe.kid
# accept (current_keyframe,loop_keyframe)
# and all the other loop edges with weight >= min_number_features
if (
keyframe_id != current_keyframe.kid or connected_id != loop_keyframe.kid
) and keyframe.get_weight(connected_keyframe) < min_number_features:
# print(f'skipping loop edge {keyframe_id} {connected_id}')
continue
Sjw = vec_Scw[connected_id]
Sji = Sjw @ Swi
edge = g2o.EdgeSim3()
edge.set_vertex(1, optimizer.vertex(connected_id))
edge.set_vertex(0, optimizer.vertex(keyframe_id))
edge.set_measurement(g2o.Sim3(Sji.R, Sji.t.ravel(), Sji.s))
edge.set_information(mat_lambda.copy())
optimizer.add_edge(edge)
num_graph_edges += 1
inserted_loop_edges.add(
(min(keyframe_id, connected_id), max(keyframe_id, connected_id))
)
# Set normal edges
for keyframe in all_keyframes:
keyframe_id = keyframe.kid
parent_keyframe = keyframe.get_parent()
# Spanning tree edge
if parent_keyframe:
parent_id = parent_keyframe.kid
try:
Swi = non_corrected_sim3_map[keyframe].inverse()
except:
Swi = vec_Scw[keyframe_id].inverse()
try:
Sjw = non_corrected_sim3_map[parent_keyframe].copy()
except:
Sjw = vec_Scw[parent_id]
Sji = Sjw @ Swi
edge = g2o.EdgeSim3()
edge.set_vertex(1, optimizer.vertex(parent_id))
edge.set_vertex(0, optimizer.vertex(keyframe_id))
edge.set_measurement(g2o.Sim3(Sji.R, Sji.t.ravel(), Sji.s))
edge.set_information(mat_lambda.copy())
optimizer.add_edge(edge)
num_graph_edges += 1
# Loop edges
for loop_edge in keyframe.get_loop_edges():
if loop_edge.kid < keyframe_id:
try:
Slw = non_corrected_sim3_map[loop_edge].copy()
except:
Slw = vec_Scw[loop_edge.kid] # already copy
Sli = Slw @ Swi
edge = g2o.EdgeSim3()
edge.set_vertex(1, optimizer.vertex(loop_edge.kid))
edge.set_vertex(0, optimizer.vertex(keyframe_id))
edge.set_measurement(g2o.Sim3(Sli.R, Sli.t.ravel(), Sli.s))
edge.set_information(mat_lambda.copy())
optimizer.add_edge(edge)
num_graph_edges += 1
# Covisibility graph edges
for connected_keyframe in keyframe.get_covisible_by_weight(min_number_features):
if (
connected_keyframe != parent_keyframe
and not keyframe.has_child(connected_keyframe)
and connected_keyframe.kid < keyframe_id
and not connected_keyframe.is_bad
and (
min(keyframe_id, connected_keyframe.kid),
max(keyframe_id, connected_keyframe.kid),
)
not in inserted_loop_edges
):
try:
Snw = non_corrected_sim3_map[connected_keyframe].copy()
except:
Snw = vec_Scw[connected_keyframe.kid] # already copy
Sni = Snw @ Swi
edge = g2o.EdgeSim3()
edge.set_vertex(1, optimizer.vertex(connected_keyframe.kid))
edge.set_vertex(0, optimizer.vertex(keyframe_id))
edge.set_measurement(g2o.Sim3(Sni.R, Sni.t.ravel(), Sni.s))
edge.set_information(mat_lambda.copy())
optimizer.add_edge(edge)
num_graph_edges += 1
if verbose:
print_fun(f"[optimize_essential_graph]: Total number of graph edges: {num_graph_edges}")
# Optimize
optimizer.initialize_optimization()
optimizer.optimize(20)
# SE3 Pose Recovering. Sim3:[sR t;0 1] -> SE3:[R t/s;0 1]
for keyframe in all_keyframes:
keyframe_id = keyframe.kid
vertex_sim3 = optimizer.vertex(keyframe_id)
corrected_Siw = vertex_sim3.estimate()
R = corrected_Siw.rotation().matrix()
t = corrected_Siw.translation()
s = corrected_Siw.scale()
vec_corrected_Swc[keyframe_id] = Sim3Pose(R, t, s).inverse() # corrected_Siw.inverse()
Tiw = poseRt(R, t / s) # [R t/s; 0 1]
keyframe.update_pose(Tiw)
# Correct points: Transform to "non-optimized" reference keyframe pose and transform back with optimized pose
for map_point in all_map_points:
if map_point.is_bad:
continue
if map_point.corrected_by_kf == current_keyframe.kid:
reference_id = map_point.corrected_reference
else:
reference_keyframe = map_point.get_reference_keyframe()
reference_id = reference_keyframe.kid
Srw = vec_Scw[reference_id]
corrected_Swr = vec_corrected_Swc[reference_id]
P3Dw = map_point.pt
corrected_P3Dw = corrected_Swr.map(Srw.map(P3Dw)).ravel()
map_point.update_position(corrected_P3Dw)
map_point.update_normal_and_depth()
mean_squared_error = optimizer.active_chi2() / max(num_graph_edges, 1)
return mean_squared_error

 浙公网安备 33010602011771号
浙公网安备 33010602011771号