https://cloud.tencent.com/developer/article/1648215
论文地址:https://arxiv.org/abs/2004.12730 代码:https://github.com/yanmin-wu/EAO-SLAM.git
来源:东北大学
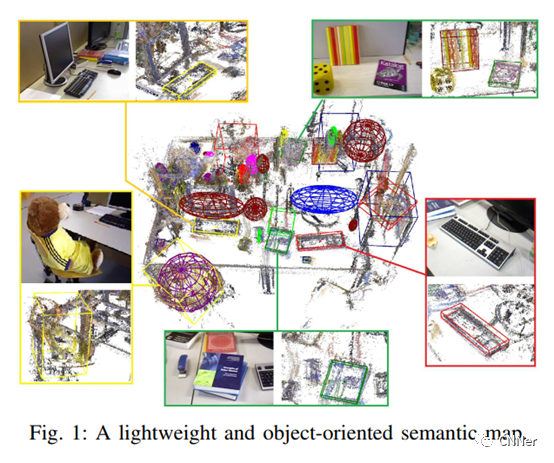
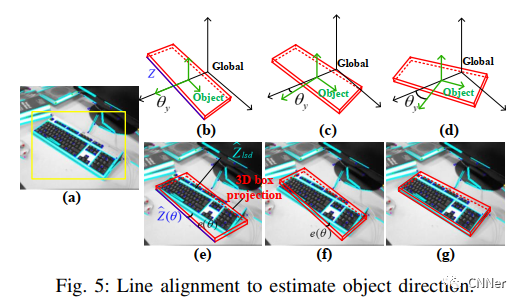
论文名称:EAO-SLAM: Monocular Semi-Dense Object SLAM Based on Ensemble Data Association
原文作者:Yanmin Wu



 浙公网安备 33010602011771号
浙公网安备 33010602011771号