会员
周边
新闻
博问
闪存
众包
赞助商
Chat2DB
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
MKT-porter
博客园
首页
新随笔
联系
管理
订阅
告别深度传感器!慕尼黑工业大学提出DropD-SLAM:仅用单目RGB即可实现RGB-D级的SLAM精度-- 有用
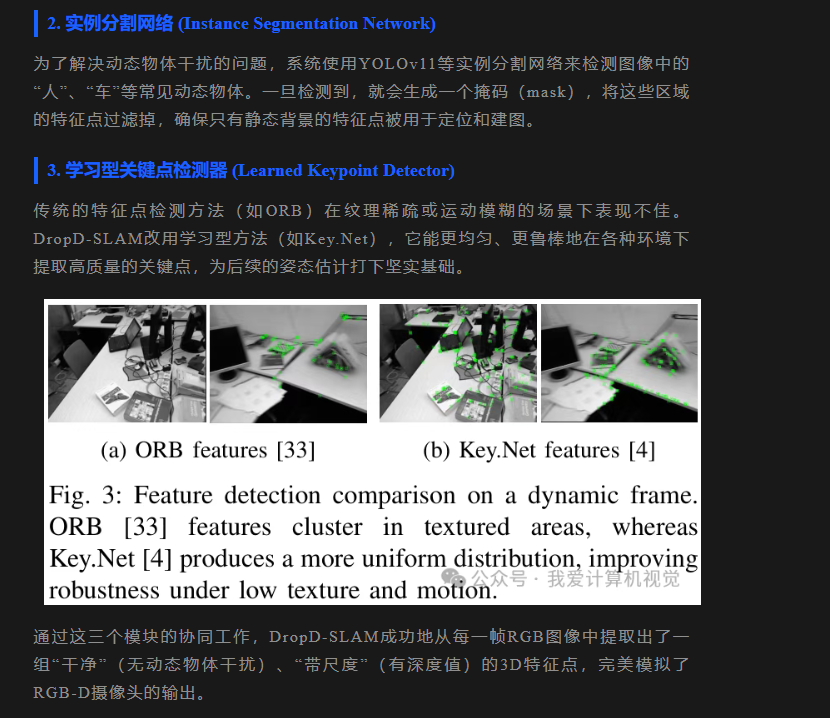
出了一组“干净”(无动态物体干扰)、“带尺度”(有深度值)的3D特征点,完美模拟了RGB-D摄像头的输出。
、
posted on
2025-11-28 04:41
MKT-porter
阅读(
10
) 评论(
0
)
收藏
举报
刷新页面
返回顶部






 浙公网安备 33010602011771号
浙公网安备 33010602011771号