

https://github.com/luigifreda/pyslam?tab=readme-ov-file
https://github.com/luigifreda/pyslam/blob/master/docs/semantics.md
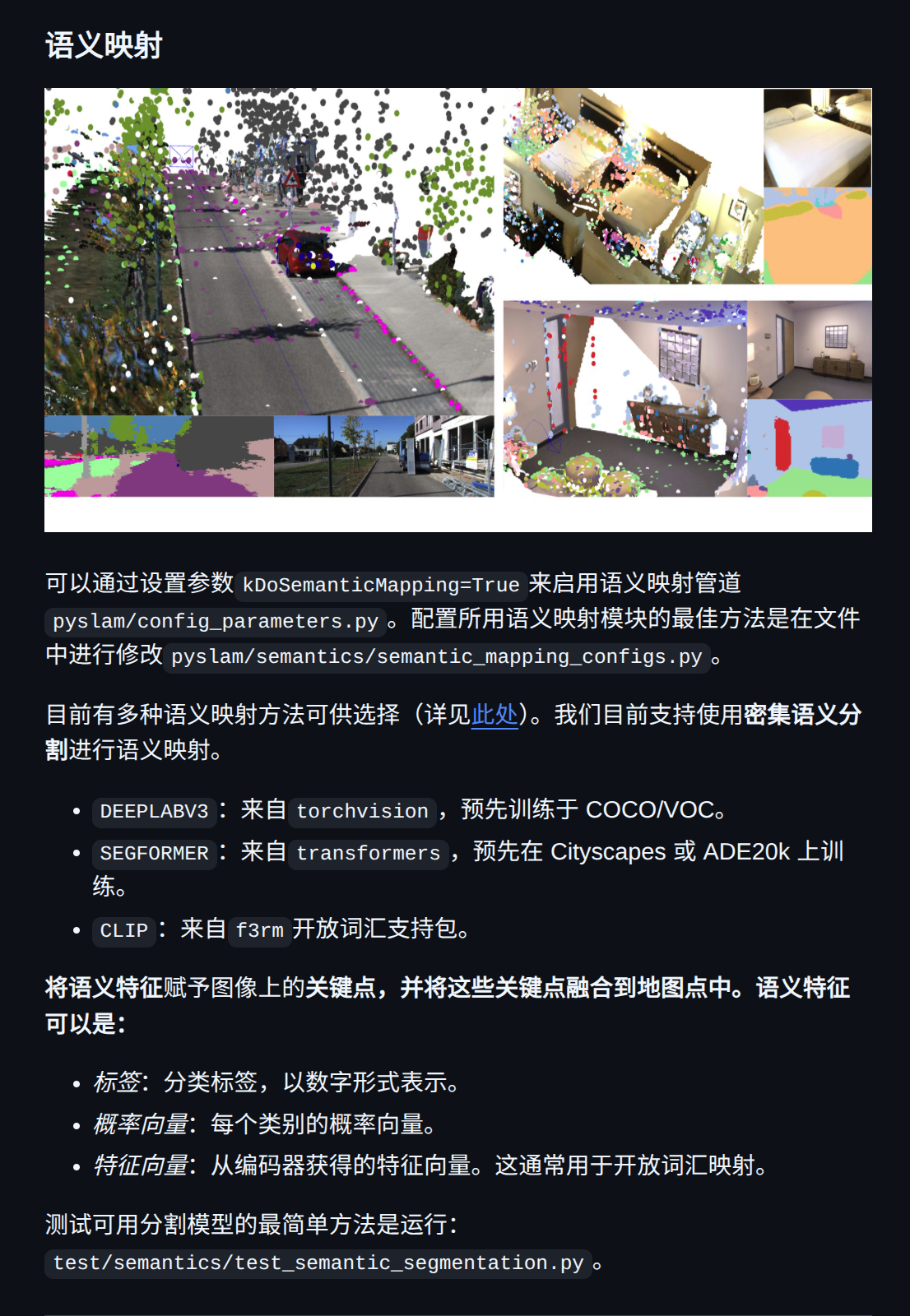
运行main_slam.py示例,在默认的 KITTI 视频上运行 Segformer(在 Cityscapes 上训练)。
要测试开放词汇功能:将文件中的语义映射配置更改semantic_mapping_configs.py为:
然后将查询词更改semantic_segmentation_clip.py为您想要的词。
frame.py:已添加kps_sem,,semantic_imgset_semantics()keyframe.py已添加kps_semlocal_mapping.py:将本地映射与语义映射关联起来map_point.py已semantic_des添加update_semantics()slam.py实例化semantic_mapping、管理生命周期(stop、、reset等)viewer3D.py添加语义可视化

 浙公网安备 33010602011771号
浙公网安备 33010602011771号