

实际应用中的优化
在实际实现中,还会采用以下策略提高精度:
- 多组三元组并行计算,结果融合
- RANSAC剔除异常匹配
- 序列帧间的运动平滑约束
基于参考图像的移动相机地理空间轨迹估计方法
摘要
本文提出了一种新颖的方法,用于估计移动相机的地理空间轨迹。该方法利用一组已知GPS位置的参考图像,通过几何约束恢复移动相机的轨迹。提出的方法包含三个主要步骤:首先,检测并匹配参考图像与视频帧之间的SIFT特征,基于匹配数量计算加权邻接矩阵(WAM);其次,利用估计的WAM为当前视频帧选择最佳匹配参考图像,通过基础矩阵约束估计视频帧的相对位置(旋转和平移);最后,采用异常值剔除和轨迹平滑(使用B样条)后处理步骤,以消除由错误点对应或基础矩阵退化估计引起的噪声。
1. 引言
GPS技术最初由美国国防部于约15年前推出,用于全球军事人员和车辆跟踪。如今,GPS已广泛应用于自动驾驶导航以及车辆和机器人的定位。本文重点解决两个问题:基于图像序列定位移动相机的地理空间位置并估计其轨迹。通过参考图像(已知GPS)与视频帧之间的最大SIFT匹配实现地理空间定位,并利用几何约束估计相机轨迹。与传统方法(如SFM和SLAM)相比,本文方法的创新点在于无需对环境进行3D重建,仅需一组已知GPS位置的参考图像即可实现定位。此外,通过子采样视频帧进行定位,并利用样条插值获得平滑轨迹,降低了计算复杂度。
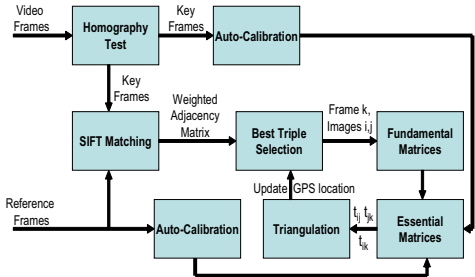
2. 系统概述
目标是根据已知GPS的参考图像集{Ip, p=1..N},计算新颖视频帧{Vt, t=1..M}的地理空间定位。假设部分视频帧与参考图像存在视野重叠,且相机内参恒定。系统流程如图1所示:首先通过自动标定获取相机内参;其次,通过视频帧间的单应性测试选择关键帧;接着,计算参考图像与视频关键帧的SIFT特征匹配,构建加权邻接矩阵(详见2.1节);然后,利用最大匹配参考图像和视频帧估计基础矩阵和本质矩阵,恢复相机姿态(详见2.2节);最后,通过三角测量解决尺度模糊性,获得视频关键帧的地理空间定位(详见2.3节)。对所有关键帧重复上述步骤后,使用样条拟合进行轨迹平滑。
2.1 加权邻接矩阵估计
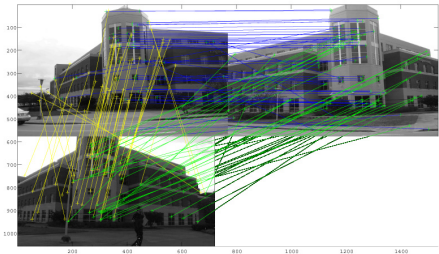
为建立参考图像Ip与视频帧Vt之间的特征点对应关系,本文对比了Harris角点检测、尺度与仿射不变点检测以及SIFT三种方法,最终选择SIFT因其对仿射失真、视角变化、噪声和光照变化的鲁棒性。匹配时,通过计算特征向量间最小与次小欧氏距离之比进行筛选,阈值设为0.4以确保高可靠性。通过二分图最大匹配实现一对一对应,构建加权邻接矩阵W(Ip,Vt),其元素值为Ip与Vt间的匹配特征数量。匹配点位置存储于矩阵M(Ip,Vt)中。
2.2 视频帧姿态恢复
目标是将视频帧Vt的相机光心位置PVt={Xt,Yt,Zt}映射到参考图像Ip的世界坐标系中。
首先将参考图像的GPS坐标(经纬度)转换为笛卡尔坐标PIp={Xp,Yp,Zp};
然后通过W(Ip,Vt)选择最大匹配参考图像Ip,并利用M(Ip,Vt)估计基础矩阵Ftp。
为减少噪声影响,采用RANSAC进行鲁棒估计。
再通过相机标定矩阵Kt和Kp计算本质矩阵Etp,进而分解出旋转矩阵R和平移向量t(含尺度模糊性)。
需要特别注意的是,此时获得的平移向量t存在尺度模糊性——只能确定方向而无法确定实际大小。
2.3 尺度模糊性解决
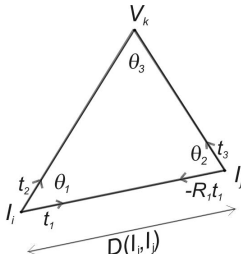
如图2所示,通过三角测量解决尺度模糊性。对于每个视频帧Vt,选择两个GPS位置不同的参考图像Ii和Ij,构建最佳三元组BT(Vk)=(Vk,Ii,Ij),使得三元组内匹配特征数最大。通过计算相机坐标系间的旋转和平移((Rij,tij), (Rik,tik), (Rjk,tjk)),利用余弦定理求三角形内角,再结合参考图像间的实际距离D(Ii,Ij)恢复尺度因子。若存在共线情况则丢弃该三元组。最终将相机中心坐标转换回经纬度。
最佳三元组选择
对于每个视频帧Vt,从整个参考图像集中选择两个参考图像,确保三元组具有以下特性:
- 与视频帧具有最大匹配特征点数
- 两个参考图像必须具有不同的GPS位置(避免退化情况)
最佳三元组BT(Vk)的数学表达式为:
BT(Vk) = (Vk, Ii, Ij)
(i,j) = argmax(i,j=1..N) min{ W(Vk,Ii), W(Vk,Ij), W(Ii,Ij) }
角度计算与尺度恢复
给定三个相机坐标系间的旋转和平移关系(Rij,tij), (Rik,tik), (Rjk,tjk),通过以下公式计算三角形的三个内角:
θ1 = cos⁻¹( dot(t1,t2) / (norm(t1)·norm(t2)) )
θ2 = cos⁻¹( dot(-t1,R1·t3) / (norm(t1)·norm(t3)) )
θ3 = 180° - θ1 - θ2
其中norm(x)表示向量x的模长。通过两个参考图像间的实际距离D(Ii,Ij)(从GPS位置计算得出)恢复尺度因子。如果任何角度为0度(表示图像位置共线),则丢弃当前三元组,选择新的三元组进行三角测量。
坐标转换与最终定位
恢复的相机中心坐标从笛卡尔坐标转换回球面坐标,获得最终的经纬度GPS位置。这一过程完整解决了平移向量的尺度模糊性问题,实现了精确的地理空间定位。
误差分析与质量控制
图4显示了对称极线距离与定位方差之间的关系,表明较高的定位方差通常对应于较高的平均对称极线距离,这反映了基础矩阵估计因噪声而产生的误差。
2.4 轨迹平滑
基础矩阵估计对特征匹配噪声敏感,可能导致GPS定位错误。通过多次RANSAC估计获取每个视频帧的GPS位置分布,剔除高方差估计值,保留低方差结果作为B样条控制点进行插值,生成平滑轨迹。

3. 实验结果与分析
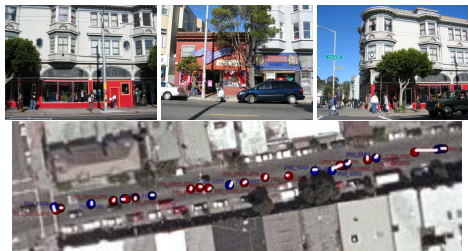
使用Garmin GPSMAP 76S(精度3米)获取真实GPS数据作为基准。采集300余张参考图像(示例如图5)和4段总计超2500帧的高清视频序列进行测试。结果如表1所示:平均定位误差在3.55米至5.12米之间。

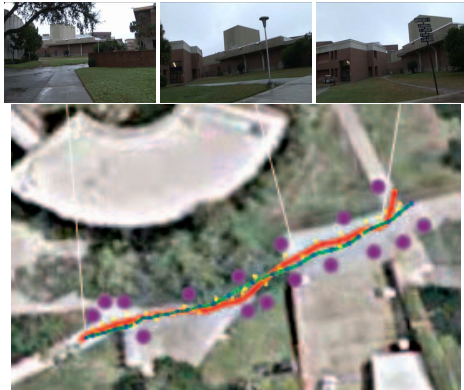
图6和图7分别展示了剧院和健康中心序列的轨迹估计结果。健康中心序列误差较高源于场景中存在树木和非显著特征(如草地),但本文方法仍可适用,而依赖全局显著特征的SFM方法在此类场景中会失效。

进一步在ICCV 2005竞赛数据集(test4和final5)上验证方法鲁棒性。结果如表2所示,平均误差分别为3.05米和6.08米,优于竞赛平均分数。图8和图9展示了估计GPS与真实值的视觉对比。

4. 结论
本文提出了一种无需3D环境重建的移动相机轨迹估计方法,通过参考图像与视频帧的几何约束实现定位。优点包括:①不要求所有视频帧均包含显著特征;②计算效率高。实验表明方法在真实序列和标准数据集上均有效。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号