核心差异与总结
- 维度与信息层次的不同:
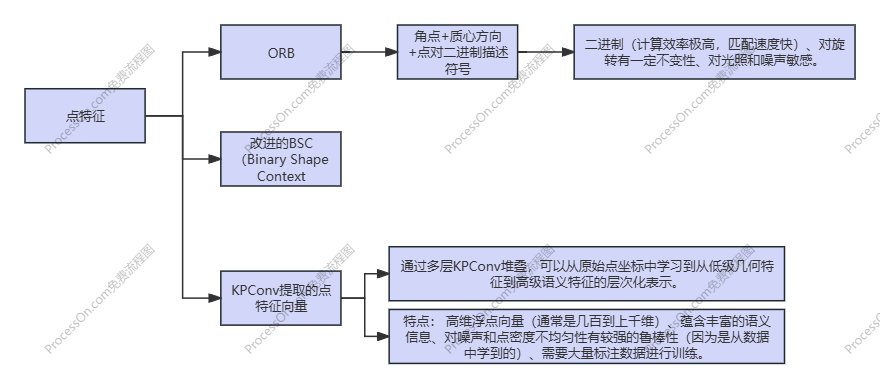
- ORB和BSC是局部描述符: 它们只描述一个点周围的非常局部的信息(纹理或几何)。它们不知道这个点属于“椅子”还是“桌子”。
- KPConv特征是点特征: 它是在整个点云的上下文中学习得到的。一个点的特征向量,其感受野可能覆盖了整个物体甚至场景的一部分,因此它既包含局部几何也包含高级语义。这是最根本的区别。
- 手工设计与学习得到的差异:
- ORB/BSC: 性能上限由设计者决定,泛化性好但可能不是最优。
- KPConv: 性能上限由数据和网络结构决定,如果训练数据充分且相关,其性能远超手工描述符,但依赖训练数据,可能存在域适应问题。
- 任务导向:
- 追求极致速度、轻量化的应用(如无人机SLAM): ORB依然是首选,因为其二进制特性无可替代。
- 需要强几何判别力、且对速度有要求的3D配准: 改进的BSC是一个很好的折中方案,它比ORB更适合3D数据,比深度学习模型更轻量。
- 需要高层次理解的应用(如自动驾驶中的3D物体检测、机器人抓取中的场景理解): KPConv等深度学习点特征是绝对的主流和最佳选择。因为任务本身就需要“理解”场景,而不仅仅是“匹配”点。
如何选择?
- 如果你的数据是2D图像,且需要实时性: 选ORB。
- 如果你的数据是3D点云,计算资源有限,但需要比传统描述符更好的性能: 可以考虑改进的BSC或其现代变种(如FPFH、SHOT,它们可以看作是BSC思想的进化)。
- 如果你的任务是高级3D视觉任务(分割、检测),且有足够的计算资源和标注数据: 毫无疑问选择KPConv或更先进的点云深度学习模型(如PointTransformer,PointNeXt等)。KPConv特征向量是面向“理解”的,而ORB/BSC是面向“匹配”的,这是不同时代和不同目标的产物。
简而言之,将ORB/BSC与KPConv特征对比,有点像比较“一把尺子”和“一个AI质检员”。尺子(ORB/BSC)精准、快速、专用于测量(匹配),而AI质检员(KPConv)更智能、能理解整体情况(语义),但更复杂、更耗时。在不同的应用场景下,它们各有不可替代的价值。



 浙公网安备 33010602011771号
浙公网安备 33010602011771号