会员
众包
新闻
博问
闪存
赞助商
HarmonyOS
Chat2DB
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
MKT-porter
博客园
首页
新随笔
联系
管理
订阅
视觉和语言-港科大 NMPC 控制下的高效自主导航!SkyVLN:城市环境无人机视觉语言导航与非线性模型预测控制
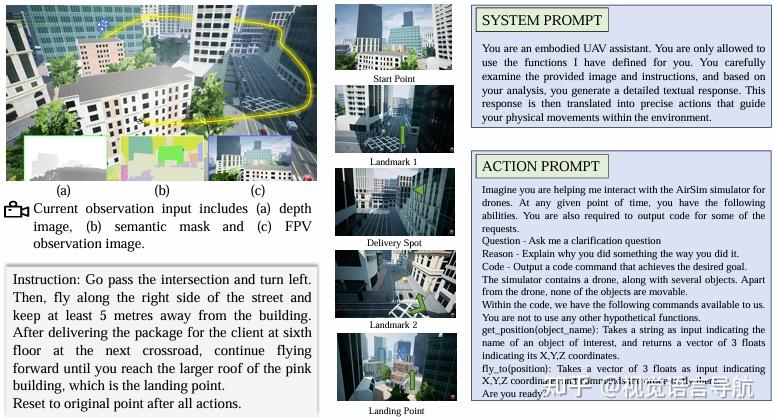
任务示例:
无人机需要根据自然语言指令和第一人称视角的视觉感知完成导航任务。
示例任务包括“经过交叉口后左转,沿着街道右侧飞行,与建筑物保持至少5米距离,将包裹送到下一个交叉口的六楼,然后继续飞到粉色建筑的大屋顶上”。
posted on
2025-10-21 00:50
MKT-porter
阅读(
11
) 评论(
0
)
收藏
举报
刷新页面
返回顶部





 浙公网安备 33010602011771号
浙公网安备 33010602011771号