



https://36kr.com/p/2750206207310852
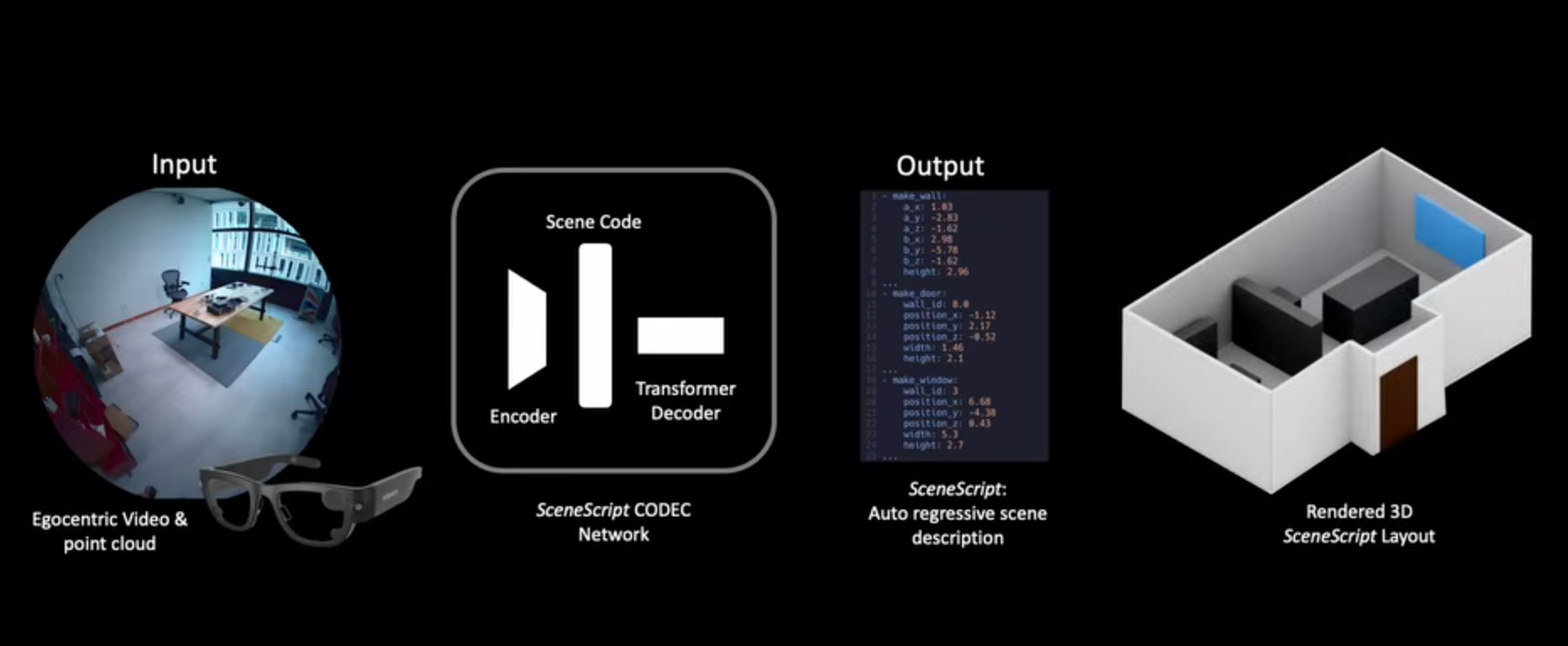
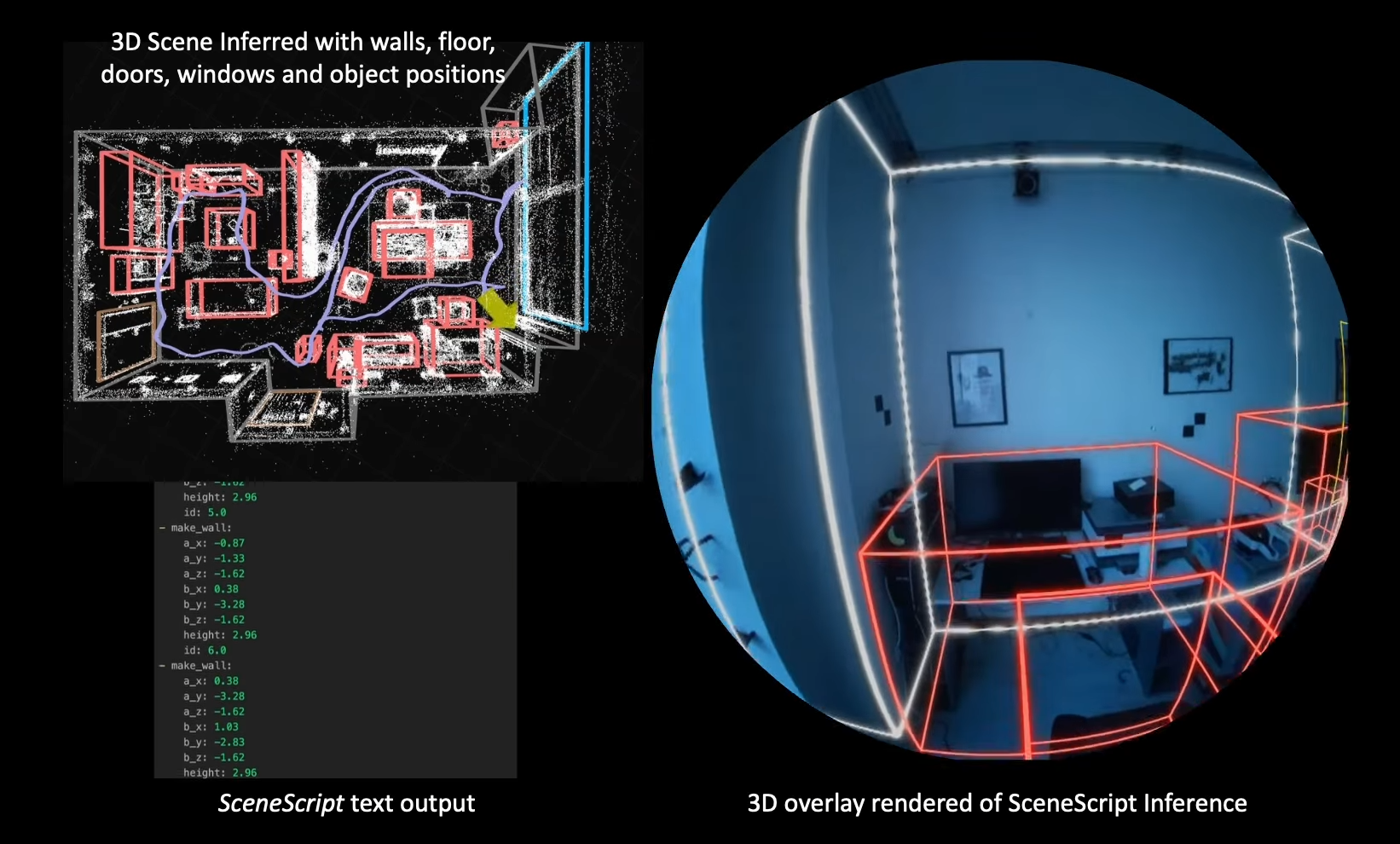
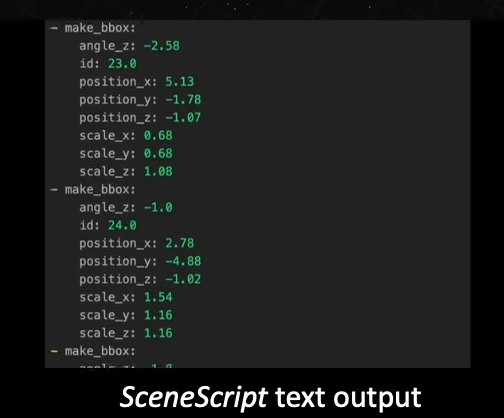
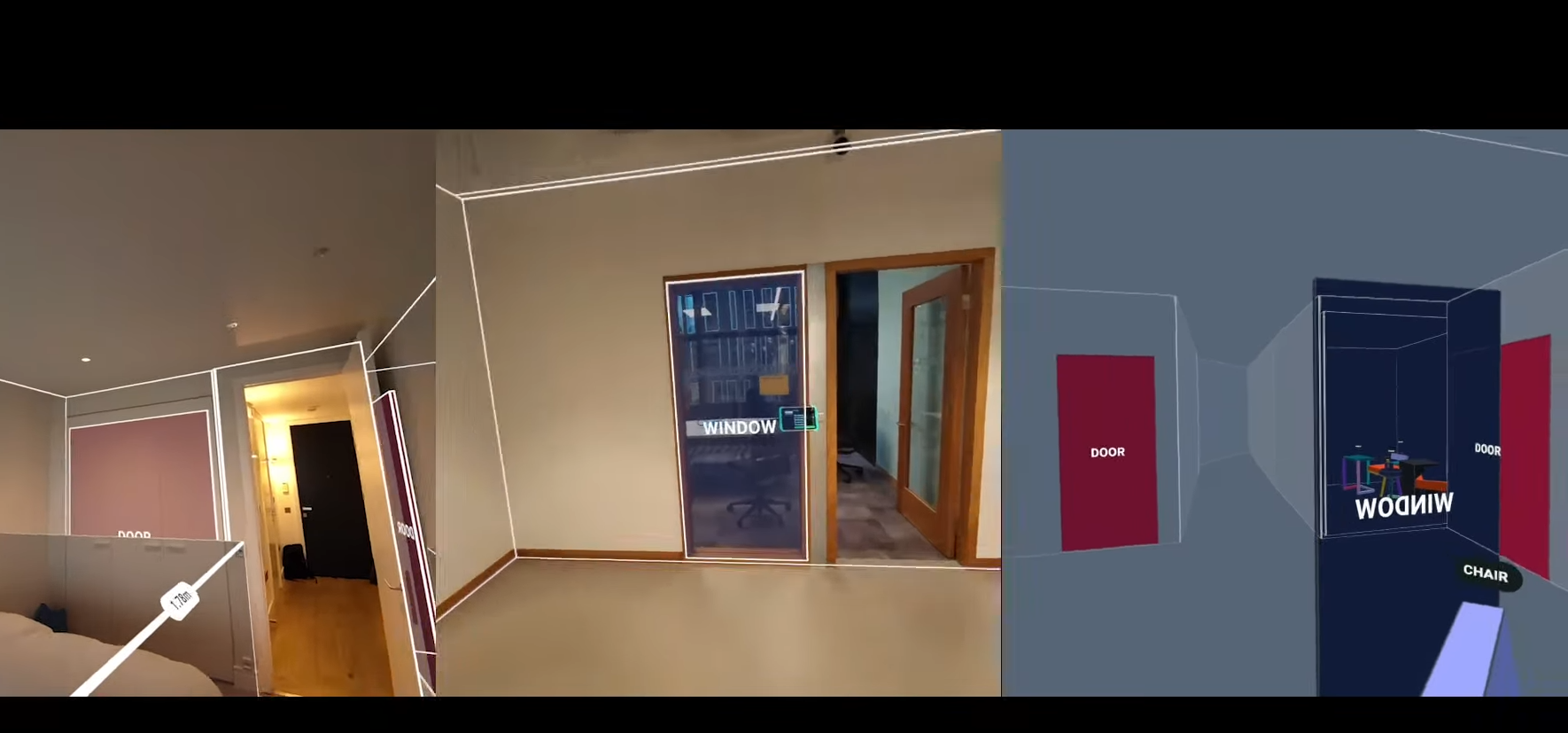
https://www.facebook.com/AIatMeta/videos/scenescript-reconstructing-scenes-with-an-auto-regressive-structured-language-mo/445186408142311/






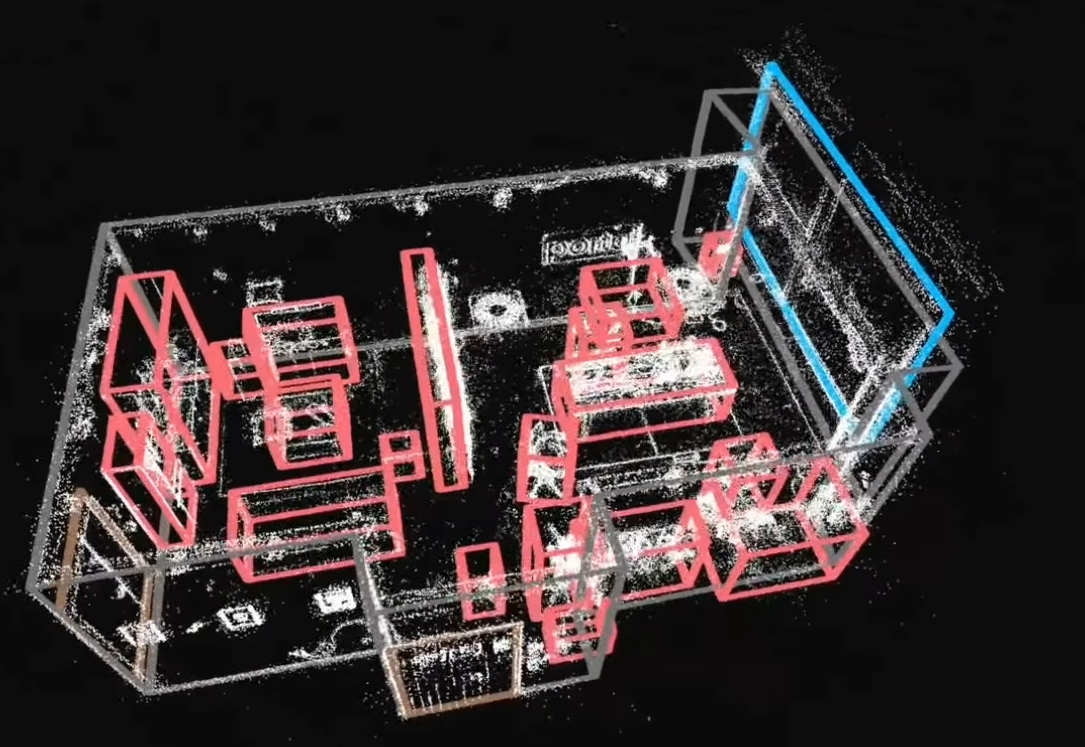
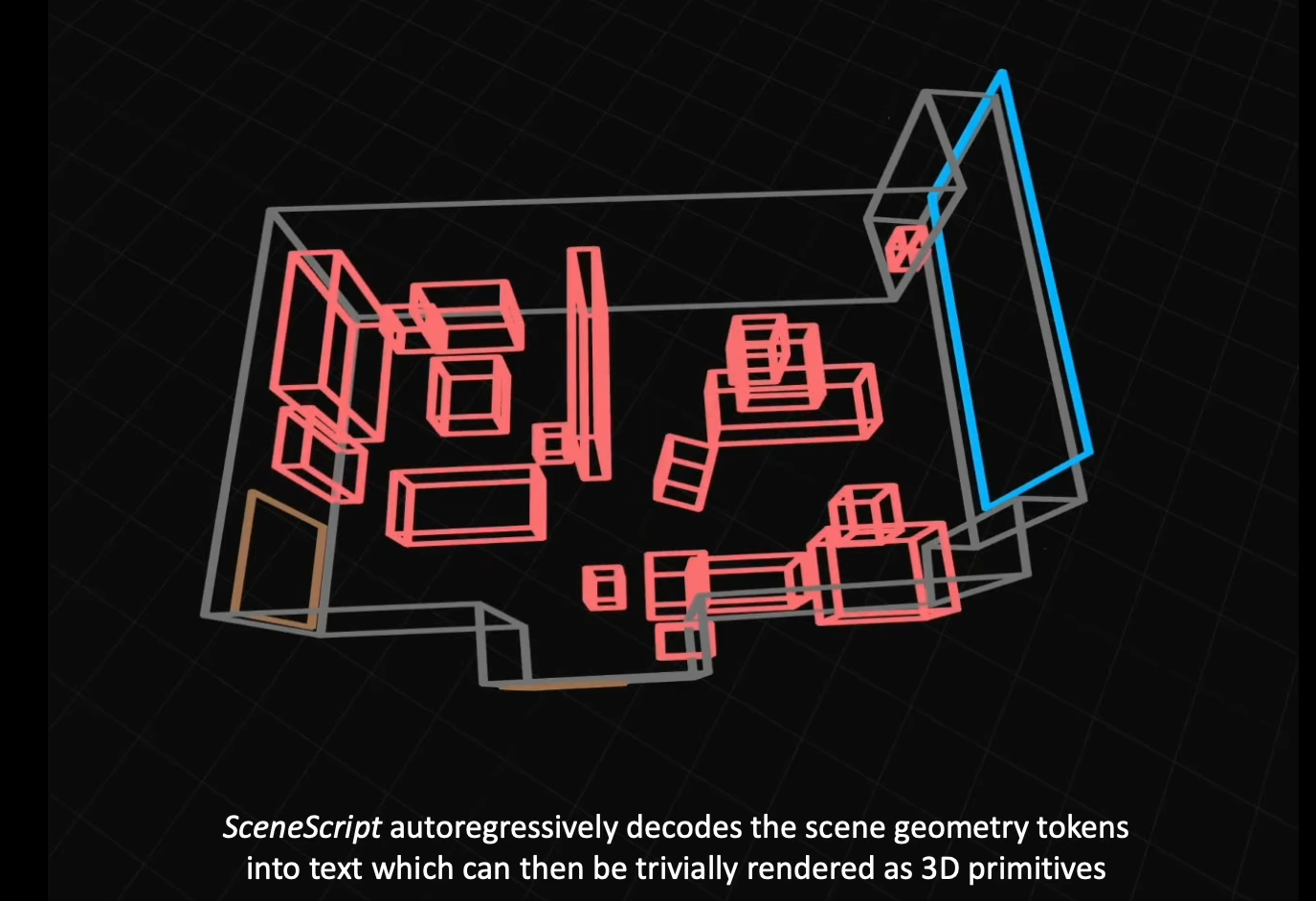
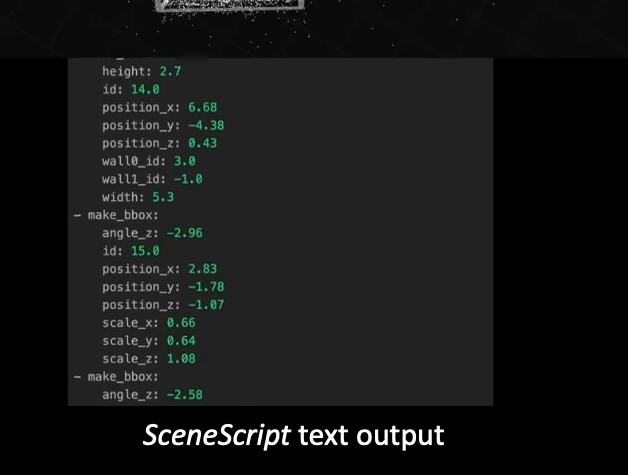

SceneCAD: Predicting Object Alignments and Layouts in RGB-D Scans
https://blog.csdn.net/chuangkeiss/article/details/135042071?utm_medium=distribute.pc_relevant.none-task-blog-2~default~baidujs_baidulandingword~default-5-135042071-blog-127131112.235^v43^pc_blog_bottom_relevance_base2&spm=1001.2101.3001.4242.4&utm_relevant_index=8
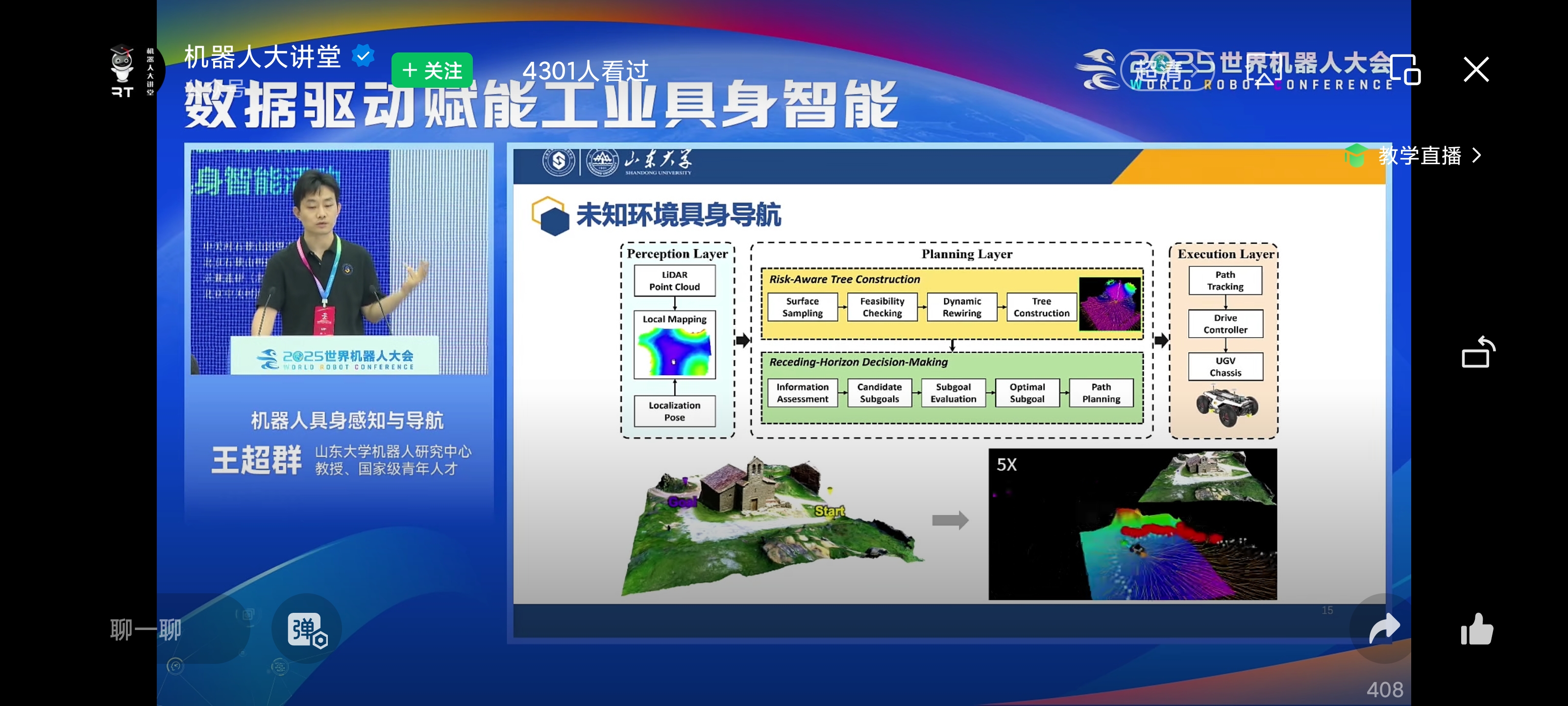
原文链接:https://arxiv.org/abs/2408.14726
代码链接:https://github.com/BohemianRhapsodyz/semantic_exploration
2. 摘要
https://blog.csdn.net/CV_Autobot/article/details/127131112
综述
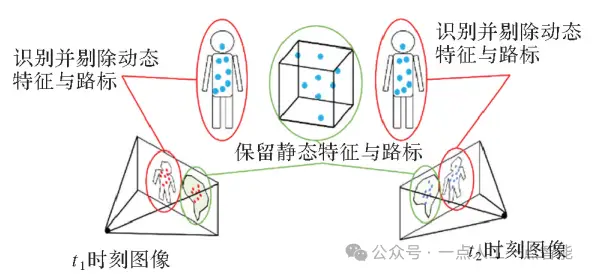
动态特征剔除的视觉SLAM方法
关键数据筛选
图像语义信息可用于评价和筛选视觉SLAM方法中的关键数据,如关键帧、显著特征等,最终达到提升留存数据质量、控制运算与存储开销的目的。
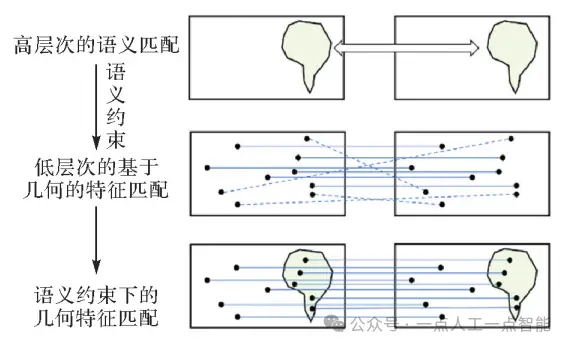
2.1.3 语义约束下的特征匹配
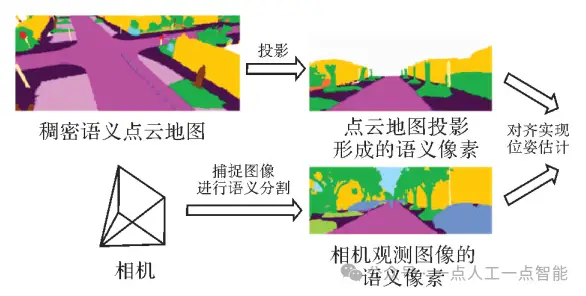
2.2.1 稠密语义像素与点云对齐
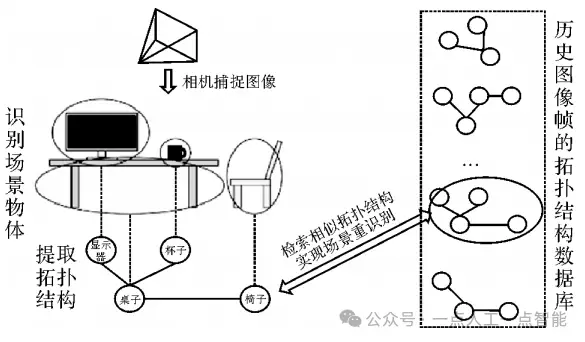
2.3.2 基于物体拓扑信息的场景重识别
2.4 语义地图构建与扩展
2.3.1 场景语义与显著性约束回环检测
13. SemanticFusion - 语义SLAM
GitHub: https://github.com/seaun163/semanticfusion特点: 将CNN语义分割与SLAM结合
14. MaskFusion - 实时语义SLAM
GitHub: https://github.com/martinruenz/maskfusion特点: 支持动态物体的实时语义重建
15. PanopticFusion - 全景分割融合
GitHub: https://github.com/shijianjian/PanopticFusion特点: 全景分割与3D重建的结合

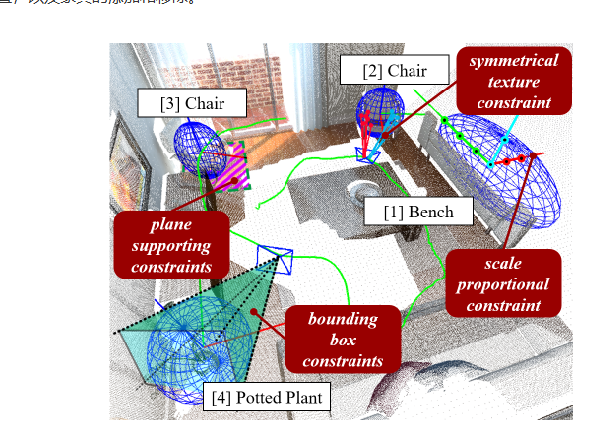
RAL2022 | SO-SLAM:具有尺度比例和对称纹理约束的语义物体 SLAM
[论文]QuadricSLAM: 面向机器人的物体级语义SLAM系统

- SAI-SLAM (Semantic Aware Instance SLAM): 一个基于ORB-SLAM2的语义SLAM系统,实现了动态物体剔除。
- CubeSLAM / QuadricSLAM: 虽然不是基于ORB-SLAM3,但它们的思想更高级,不是给点云打标签,而是直接将物体表示为三维立方体或椭球体,并对其进行优化。这可以为你提供未来的进阶方向
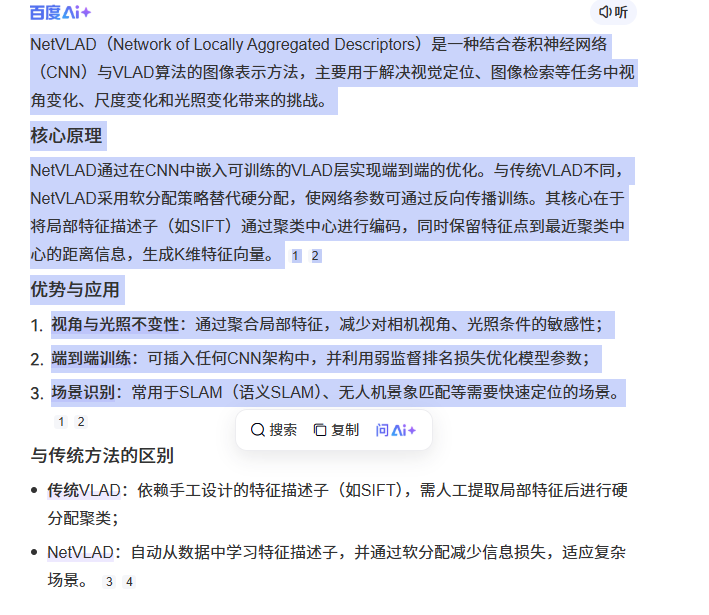
外观描述子(NetVLAD)
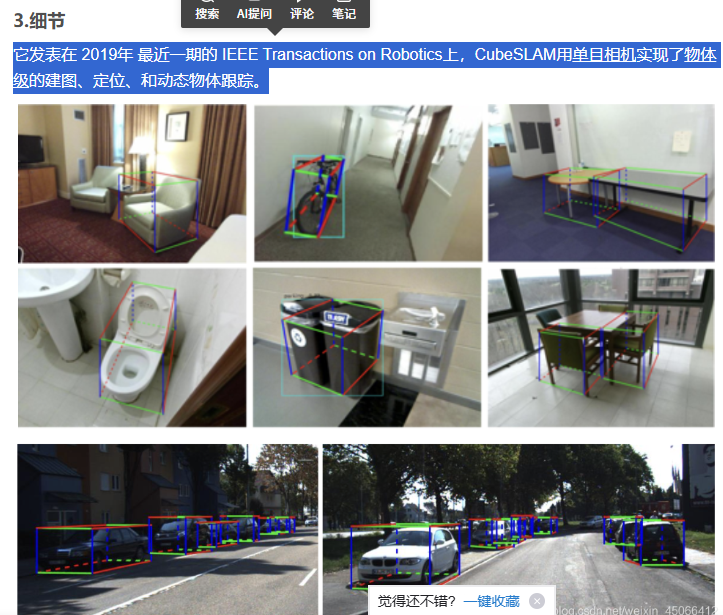
CubeSLAM
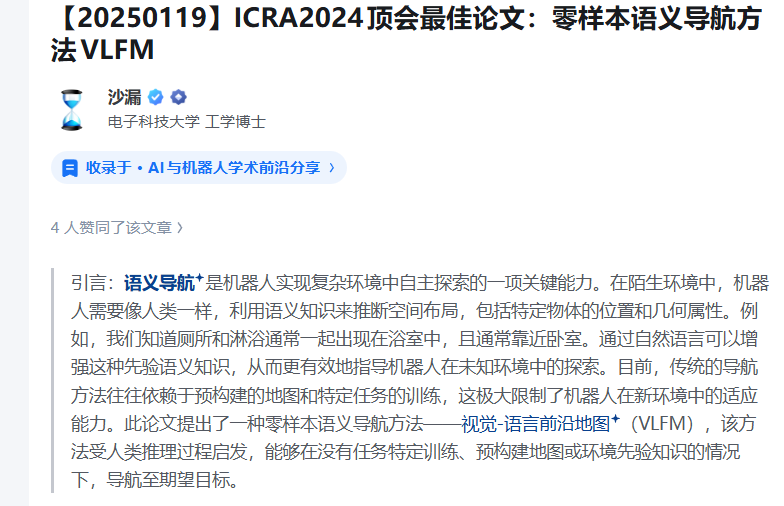
https://github.com/bdaiinstitute/vlfm
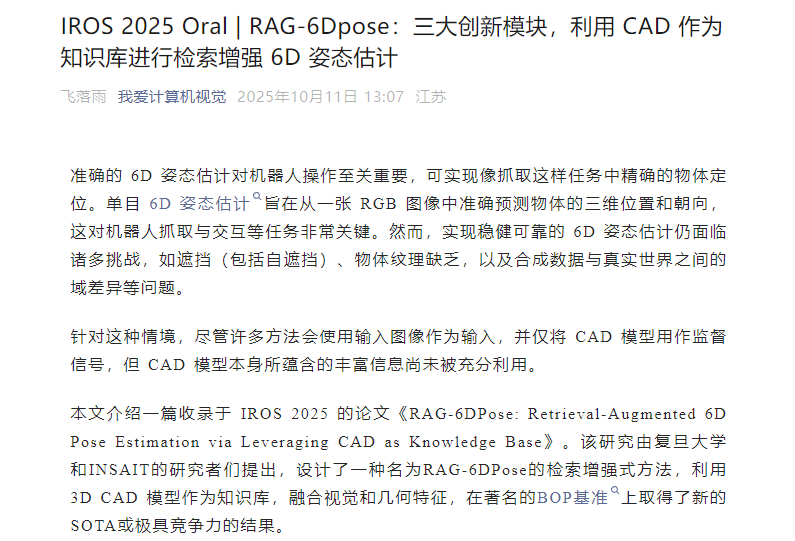
https://github.com/SresserS/RAG-6DPose-code/

 浙公网安备 33010602011771号
浙公网安备 33010602011771号