

https://blog.csdn.net/owlsun/article/details/150992197
空地融合+3DGS:攻克大场景建模中的关键挑战
前言
随着无人机航拍、三维激光扫描和计算机视觉技术的快速发展,大场景三维重建成为研究热点。然而,实际应用中仍面临诸多挑战:多源数据难以对齐,高分辨率图像显存占用过大,训练耗时长,遮挡导致拟合错误,复杂光照造成颜色不一致,以及分块合并时接缝明显的问题。
为解决这些难题,本文介绍了一种基于空地融合多源数据的大规模3DGS建模项目。通过整合地面激光点云、无人机影像与深度学习算法,提出了一套完整流程,实现高质量、高精度的三维重建。
一、数据预处理
1.1 空地数据格式
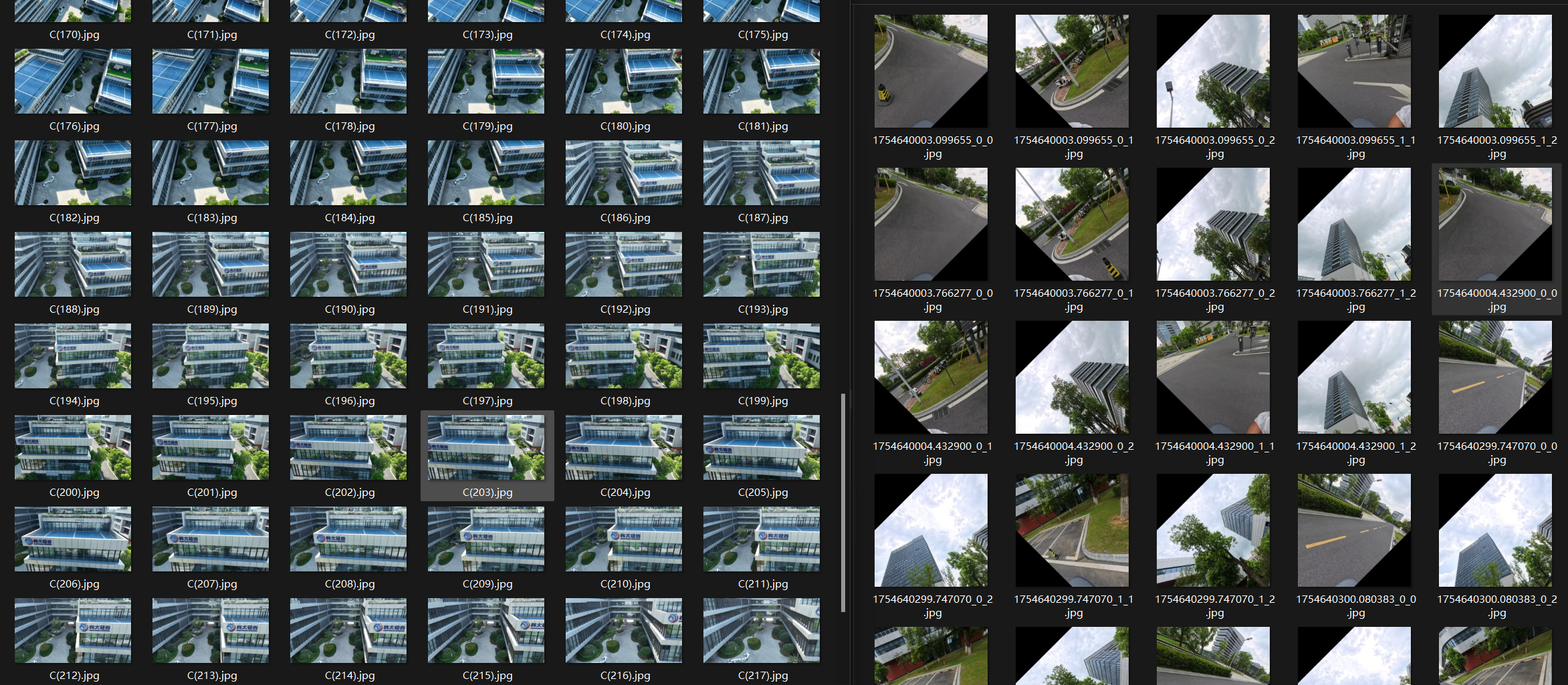
◆地面激光点云(.las 或 .ply 格式):通过三维激光扫描仪获取建筑物立面、地面和植被的精细表面信息。
◆无人机航拍影像(.jpg等格式):获取地物顶部的三维空间信息,弥补地面点云因遮挡导致的空洞问题。
1.2 执行SfM并生成COLMAP格式数据
◆导入数据
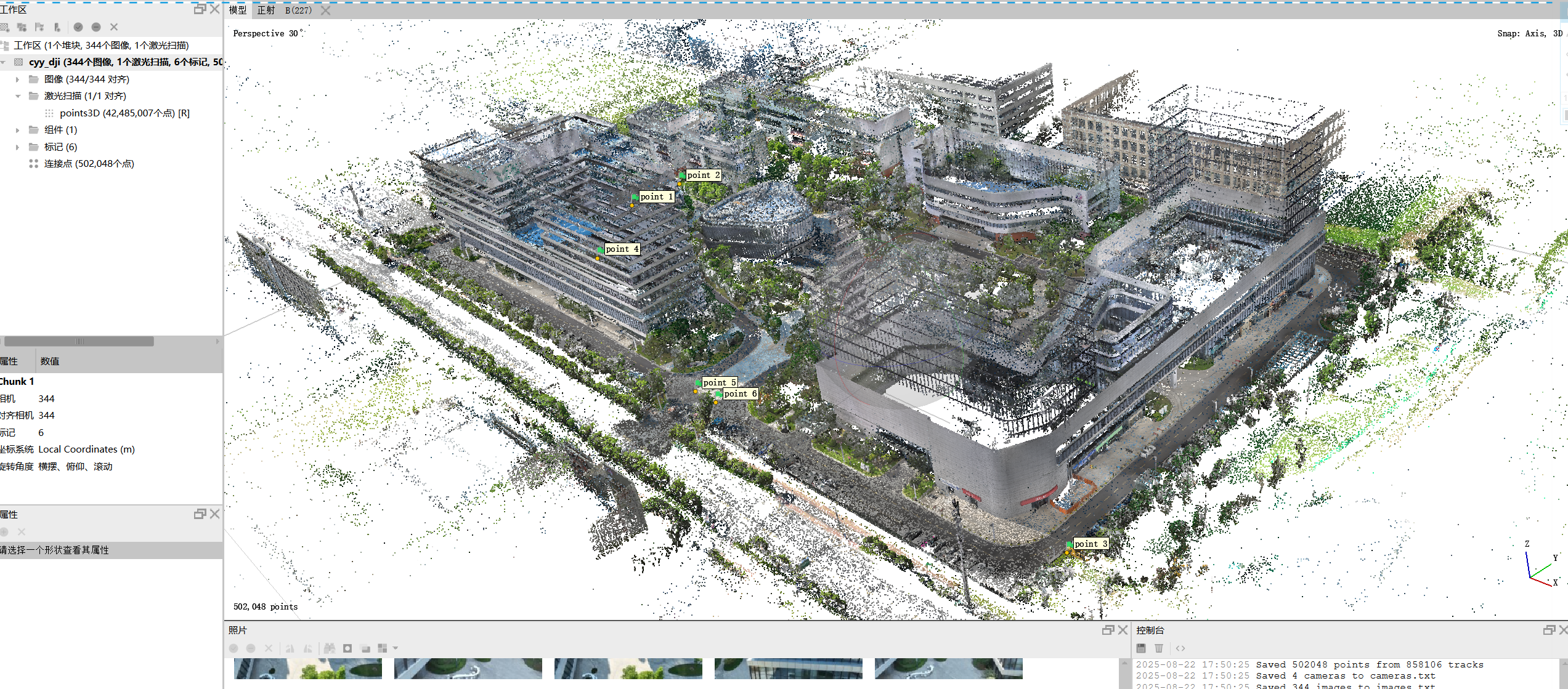
将无人机航拍影像和激光点云数据分别导入Metashape。
◆对齐后配准
利用地面控制点(GCP)或手动选取至少3个同名点,完成初步对齐。
GCP布设在重叠区域,并通过CSV文件导入实测坐标。
采用ICP算法优化点云与影像的对齐精度,降低误差。
◆得到融合数据
通过‘人工粗配准+ICP算法精配准’相结合的方式,将无人机影像与地面激光点云对齐,构建完整的三维场景模型。
◆导出对齐结果为colmap格式
导出对齐后的相机参数和点云数据为colmap格式(代码见上一篇),用于后续3DGS分块和训练。
二、处理数据与训练3DGS
2.1 分块与并行训练
◆小场景:可直接一次性训练。
◆大场景:沿XY轴(地平面)分割,每个子块包含均衡的点云数量。
◆并行训练:为每个块启动独立的训练进程,动态调度GPU资源,大幅缩短训练时间。

图3:场景分块效果示意图
2.2 根据2D-3D对应关系选出相关联的相机
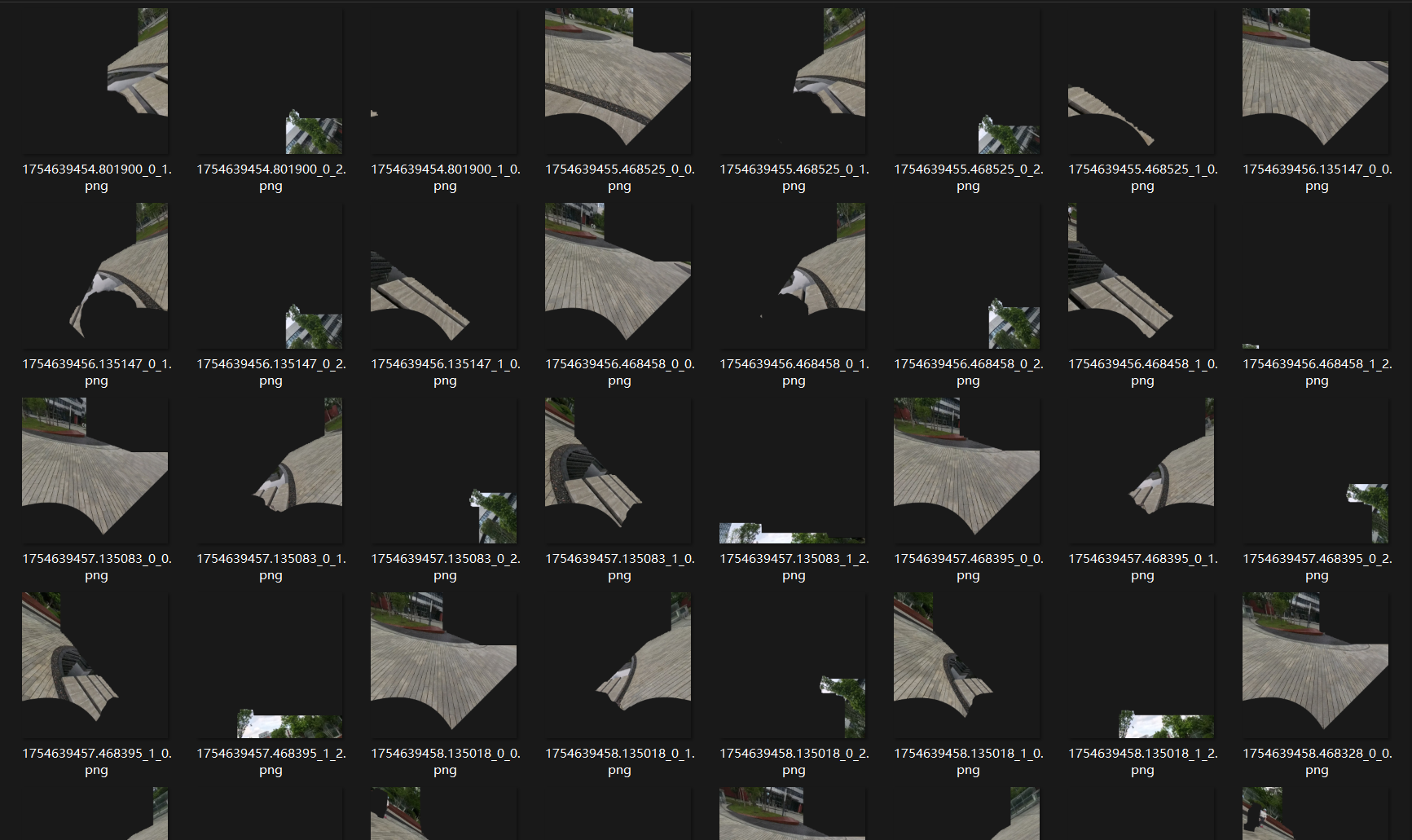
◆基于生成的定向包围盒,筛选出与目标区块相关联的相机,包括位于区块内的相机和区块外可能对其产生影响的相机。针对区块外的相机,沿目标区块中心发射射线,计算其与目标区块之间的所有中间区块。
◆将中间区块的点云投影到当前相机位姿下,生成对应的二值掩码。通过形态学闭运算对掩码进行优化,填充空洞并去除噪声,确保掩码能够准确反映可见区域,从而提升后续图像处理和三维重建的质量。
2.3 光照差异问题
◆为应对复杂光照条件下的颜色偏差和几何漂移问题,使用双边滤波对点云进行降噪处理,同时保留边缘细节。
◆结合外观嵌入技术,解耦光照与几何信息,为每个视角提供个性化的光照修正。
◆高斯点在保持几何一致性的同时,根据局部光照条件动态调整颜色和亮度,有效避免因光照差异导致的拟合误差。
2.4 遮挡、拟合偏移问题
在深度信息拟合过程中,遮挡或背景块干扰可能导致错误结果。为此,采取以下策略:
◆深度信息筛选
利用深度图生成二值掩码,并通过形态学操作优化掩码,确保仅保留目标块的可见区域。
◆相机射线投影校正
通过射线投影方法,明确目标块与其他块之间的遮挡关系,优先保留深度最近的块内点云信息,避免背景块对前景块的干扰。
◆训练数据优化
根据优化后的掩码标记参与训练的像素,减少因深度信息不一致导致的拟合误差,提升模型的训练精度和鲁棒性。
2.5 数据冗余问题
◆ 分辨率调度器
在空地融合任务中,地面激光点云提供几何低频信息,无人机影像提供纹理高频信息;若全程以全分辨率渲染训练,计算冗余大。通过动态分辨率调度,可在不牺牲最终精度的前提下压缩训练时间。
◆ 优化过程
将优化过程视为“由低频到高频的渐进式拟合”。早期用低分辨率快速收敛场景低频结构(激光主导几何);中期逐级提升分辨率,引入无人机影像的高频纹理;后期恢复全分辨率,保证与原始空地数据一致的视觉与几何保真度。
2.6 合并区块与高斯点优化
◆ 区块合并与外观特征融合
在区块合并过程中,融合外观特征并应用MipSplatting滤波器,确保合并后的模型在纹理和光照上的一致性。通过扩展边界区域的对齐与融合,减少因区块拼接导致的视觉不连续问题,提升整体模型的视觉质量。
◆ 高斯点影响范围优化
针对影响范围超出块边界的高斯点,采用分裂策略将其限制在块内,确保其影响范围不会延伸到块外。同时,保留块内的高斯点不变,避免过度处理对原始数据的影响。该方法有效减少了因边界扩展导致的冗余计算,同时保证了合并后模型的精度和效率。
◆ 去除重复点
在区块合并过程中,部分高斯点可能因边界扩展而重复出现。通过分析点云的空间分布,识别并移除这些重复点,确保最终模型的干净与高效,同时避免冗余数据对渲染性能的影响。
三、最终成果
3.1 场景展示
◆室内场景:呈现建筑物内部的高精度重建效果,包含复杂的玻璃反射和弱纹理区域。
◆室外场景:覆盖城市建筑群、自然景观和道路网络,细节丰富且层次分明。


图8:基于Unity的大场景3DGS渲染器
3.2 应用场景
◆智慧城市:用于城市规划、交通管理和灾害监测。
◆影视制作:提供高质量的虚拟场景素材。
◆文化遗产保护:精确记录历史建筑的几何和纹理信息。
四、总结与展望
本项目通过空地融合技术和3D高斯重建方法,成功实现了大场景的高质量三维建模与渲染展示。
未来计划:
◆将项目整合至全自动脚本并开源。
◆解决高空处缺少激光点云的问题,增强模型细节表现。
◆性能优化,以更短时间实现更高精度的效果。
◆结合语义分割,实现场景的智能化分析。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号