

https://support.nooploop.com/cn/tofsense/protocol

https://item.taobao.com/item.htm?_u=q1qf7bf5e103&id=661290637611&pisk=gueLOnY6ZNbHEoeKjk5MZ7psxASGj1qUbyrXE40HNPUTyoK3tb0oNYU4kb9lTvc-ePggK2qnd0G7rrNnRW0ke8UaJpvodzX-PoPN42m3K3n71yputk0363HUIWvo-wk8VrDRoZXcnkrEaY_cop1vk_kjD0TBr2i_fYm8skOHckrEU41eLo1YY3HBYG6IV4stC0n2RYGIAFgs70mWPzgI1Fix0YM7P2GsfmmIV0GIFhstDmmIVBMW1VijmDiQPYst1DusPYGQPlMEQa36A4v8g4-mzF83pL97BDh1skgs1fSoAXp_vV95_rnKuqZIWL9SkDl-GlEhJKriLlaxmyX6prE4QPn_lTQtUPP7P0U13UDUiyyq6l5XClDKSjibCg9jrJFgcVHvV9Ztp2hbKXBXFrZTVScTIi6qpvgQZvrkDwqTpyqUBuxW1vH36jeKht8Ir5qYe0ePzOUY0Rztfr6RRgWun-pyWE0xqBsOXQRrOc7Ao0PFyYwXTc3cvTdyafSwEBecuQRr9fitoGmHaQlGa&spm=a1z09.2.0.0.4f9e2e8do3lrCy&sku_properties=1627207%3A29599107454
import serial
import serial.tools.list_ports
_TOFSense_Frame_Header = b"\x57\x00"
_TOFSense_M_Frame_Header = b"\x57\x01"
def verify_checksum(data):
"""校验和"""
checksum = sum(data[:-1]) & 0xFF
return checksum == data[-1]
def check_header(data, header):
"""校验帧头"""
return data[0] == header[0] and data[1] == header[1]
def nByteUnpack(data, index, byte_num, signed=False):
"""
返回单个解析数据
Args:
data:原数据 bytes
index:起始位置 int
byte_num:单个字节数 int
signed:是否为有符号数 bool
"""
return (
int.from_bytes(data[index : index + byte_num], byteorder="little", signed=signed),
index + byte_num,
)
def TOFSenseFrame0Unpack(data):
"""TOFSense/TOFSense-F系列帧解析"""
if not check_header(data, _TOFSense_Frame_Header) or not verify_checksum(data):
return None
index = 3
parsed_data = {}
parsed_data["id"], index = nByteUnpack(data, index, 1)
parsed_data["system_time"], index = nByteUnpack(data, index, 4)
dis, index = nByteUnpack(data, index, 3)
parsed_data["dis"] = dis / 1000.0
parsed_data["dis_status"], index = nByteUnpack(data, index, 1)
parsed_data["signal_strength"], index = nByteUnpack(data, index, 2)
return parsed_data
def TOFSenseMFrame0Unpack(data):
"""TOFSense-M系列帧解析"""
if not check_header(data, _TOFSense_M_Frame_Header) or not verify_checksum(data):
return None
index = 3
parsed_data = {}
parsed_data["id"], index = nByteUnpack(data, index, 1)
parsed_data["system_time"], index = nByteUnpack(data, index, 4)
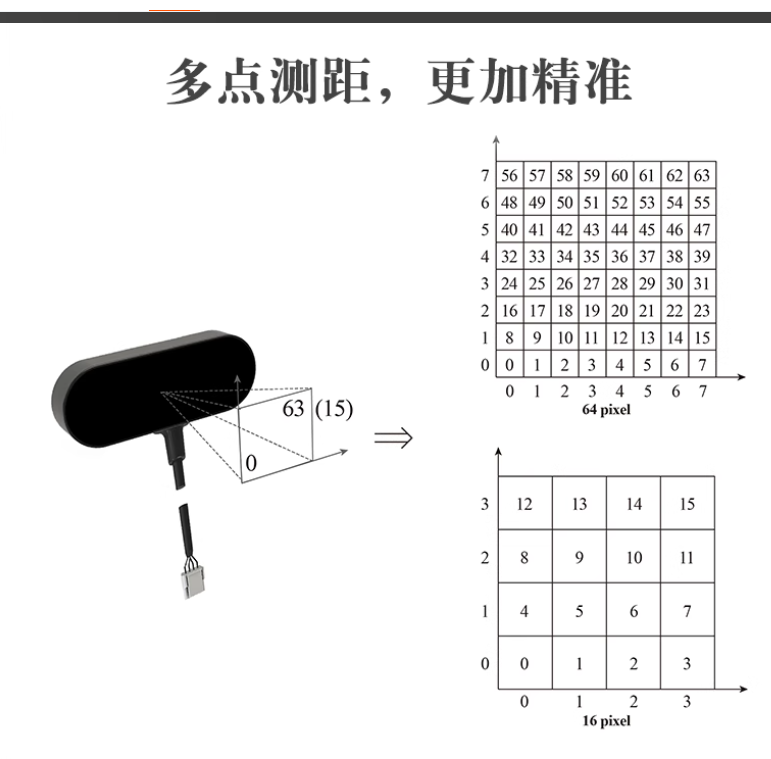
parsed_data["zone_map"], index = nByteUnpack(data, index, 1)
parsed_data["dis"] = []
parsed_data["dis_status"] = []
parsed_data["signal_strength"] = []
for i in range(parsed_data["zone_map"]):
dis, index = nByteUnpack(data, index, 3)
status, index = nByteUnpack(data, index, 1)
signal, index = nByteUnpack(data, index, 2)
parsed_data["dis"].append(dis / 1000.0 / 1000.0)
parsed_data["dis_status"].append(status)
parsed_data["signal_strength"].append(signal)
return parsed_data
#TOFSense-M/MS使用示例
import serial
_Frame_Header = b"\x57" # 帧头0x57
_Frame_Mark = b"\x01" # 帧关键字0x00
_One_Frmae_length = 400 # 一帧字节数
PORT = "COM26" # 用户TOF所连接的串口
BAUD = 921600 # 波特率
def open_first_serial(baudrate=BAUD, timeout=1):
ports = list(serial.tools.list_ports.comports())
if not ports:
print("未找到串口设备")
return None
first_port = ports[0].device
try:
first_port="COM110"
ser = serial.Serial(port=first_port, baudrate=baudrate, timeout=timeout)
print(f"已打开串口: {first_port}")
return ser
except serial.SerialException as e:
print(f"无法打开串口 {first_port}: {e}")
return None
def check_person_within_range(dis_list, threshold=1.0):
"""
根据测距数据判断前方是否有人(距离小于阈值)。
Args:
dis_list (list): 激光雷达距离数组(单位:米)。
threshold (float): 判断距离阈值,默认1.0米。
Returns:
int: 有人返回1,无人返回0。
"""
for d in dis_list:
if 0 < d < threshold:
return 1
return 0
def check_person_center_block(dis_list, threshold=1.0):
"""
判断中间3x3区域是否全部小于阈值。
Args:
dis_list (list): 距离数组(64个,8x8)。
threshold (float): 距离阈值(米)。
Returns:
int: 满足条件返回1,否则返回0。
"""
if len(dis_list) != 64:
print("数据长度不是64,判定失败")
return 0
# 转换为8x8二维数组
dis_matrix = np.array(dis_list).reshape((8, 8))
# 中心区域:第3~5行、第3~5列(索引2~4)
center_block = dis_matrix[2:5, 2:5]
# 检查是否所有值都小于阈值且非0(0通常表示无效数据)
if np.all((center_block > 0) & (center_block < threshold)):
return 1
else:
return 0
# import matplotlib.pyplot as plt
# from mpl_toolkits.mplot3d import Axes3D
# import numpy as np
# def visualize_dis_3d(dis_list):
# """
# 将 64 个激光雷达距离值绘制成 3D 表面图。
# Args:
# dis_list (list): 距离值数组,长度为64(8x8)。
# """
# if len(dis_list) != 64:
# print("数据长度不是 64,无法绘图")
# return
# # 将一维列表转为 8x8 二维数组
# Z = np.array(dis_list).reshape((8, 8))
# # 构建 X 和 Y 网格
# X, Y = np.meshgrid(np.arange(8), np.arange(8))
# # 创建图形窗口
# fig = plt.figure()
# ax = fig.add_subplot(111, projection='3d')
# # 绘制表面图
# surf = ax.plot_surface(X, Y, Z, cmap='viridis')
# # 添加颜色条
# fig.colorbar(surf, shrink=0.5, aspect=10)
# # 设置标签
# ax.set_xlabel('X区块')
# ax.set_ylabel('Y区块')
# ax.set_zlabel('距离(米)')
# ax.set_title('TOFSense 距离3D可视化')
# plt.show()
if __name__ == "__main__":
try:
ser = open_first_serial()
except Exception as e:
ser = None
print(f"串口初始化失败: {e}")
if ser:
try:
while True:
buffer = bytearray()
data = ser.read(1)
if data == _Frame_Header: # 确认帧头
buffer.extend(data)
data = ser.read(1)
if data == _Frame_Mark: # 确认关键字
buffer.extend(data)
buffer.extend(ser.read(_One_Frmae_length - 2))
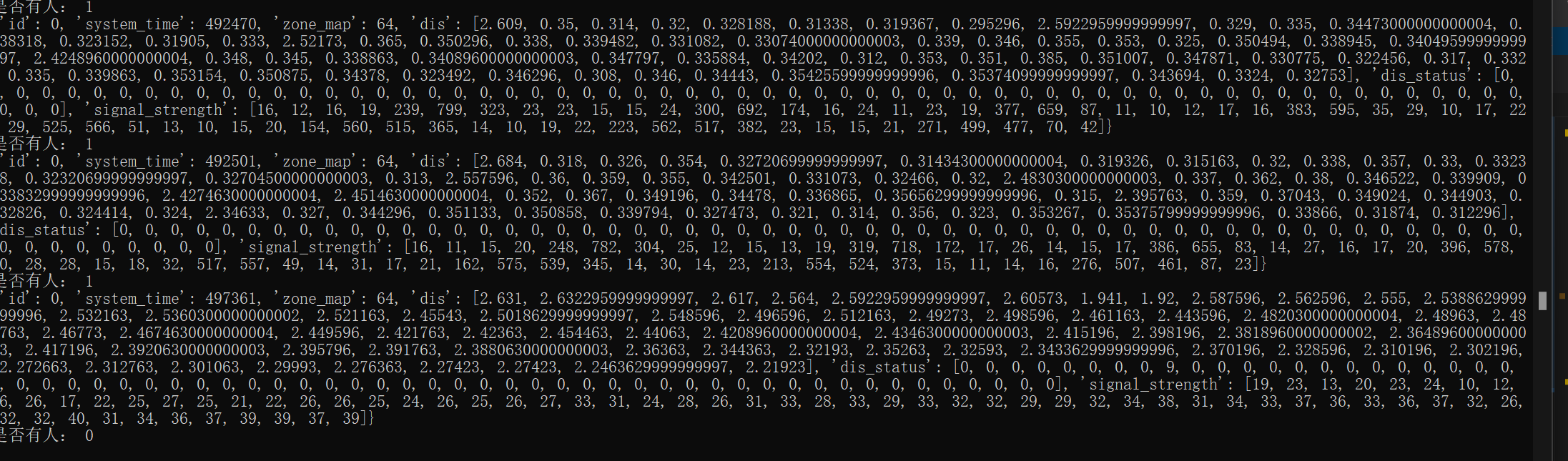
tof_data = TOFSenseMFrame0Unpack(buffer)
if tof_data:
print(tof_data)
#flag = check_person_within_range(tof_data["dis"])#
flag = check_person_center_block(tof_data["dis"])
print("是否有人:", flag)
#visualize_dis_3d(tof_data["dis"])
except KeyboardInterrupt:
print("\n程序已手动中断 (Ctrl+C)")
except Exception as e:
print(f"\n运行中发生错误: {e}")
finally:
ser.close()
print("串口已关闭")
# 输出:
# {'id': 0, 'system_time': 11366, 'zone_map': 64,
# 'dis': [2.154, 2.13243, 2.11173, 2.127596, 2.1398960000000002, 2.1082959999999997, 2.1094299999999997, 2.1198629999999996, 2.172, 2.116596, 2.124196, 2.143163, 2.1267300000000002, 2.107463, 2.123, 2.11543, 2.138163, 2.1318629999999996, 2.141896, 2.139596, 2.11843, 2.13943, 2.124863, 2.11843, 2.129596, 2.149863, 2.16833, 2.1600300000000003, 2.160063, 2.137896, 2.14, 2.11373, 2.15773, 2.126596, 2.1598629999999996, 2.1494630000000003, 2.16493, 2.1447629999999998, 2.13773, 2.10873, 2.1372959999999996, 2.15973, 2.160596, 2.16473, 2.1584630000000002, 2.1400300000000003, 2.11803, 2.11573, 2.1734299999999998, 2.139463, 2.158196, 2.166163, 2.11973, 2.1347300000000002, 2.128163, 2.1134630000000003, 2.167, 2.1527629999999998, 2.133163, 2.1372959999999996, 2.141896, 2.1318960000000002, 2.103863, 2.1174630000000003],
# 'dis_status': [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
# 'signal_strength': [20, 21, 24, 26, 29, 23, 21, 22, 20, 26, 32, 25, 24, 28, 19, 21, 25, 22, 29, 26, 21, 21, 22, 21, 26, 22, 30, 27, 34, 29, 16, 24, 24, 26, 22, 28, 36, 31, 24, 24, 23, 24, 26, 24, 28, 27, 27, 24, 21, 28, 32, 25, 24, 24, 25, 28, 20, 31, 25, 23, 29, 29, 22, 28]}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号