

3D打印机配件单轴混合式42步进电机2相4线17HS8401s/17HS8401

https://item.taobao.com/item.htm?id=561097731505&pisk=gzIt2rGIoWVg2LF8_Gznmr2-kLwhMyXa91WSmIAil6Cdh1OMiE9sOk9WBKi6ct9XD610QCXb_sIvOt7gQEVZHwCNFFfA3RJXGs1viN43qOWw0nNkMuqlQk_KO3f9hF6QhKp6GJYsuAKBtnNuZo3ndFPMc10eVRZIRLRBCK9X1JdBEL-XCFibpB9vUIi1Gs6QpKpkGq9XGetBnLKj5KT1dk9WUc96CniQpKRBhV1XcJKIh-NvOAOmDagzYcau0qnoqMp9WInD9mC5x0YwNRRIDmdHcF3GCBnjcMQnAEHe1zkHghANDdC44c-6kaWDH1EtfsBPY6pCNonk19WlrFS_o0YJjCLVfsFxkdQl6sR1Cfg6ehd9PGTEF-t9lwIpjGNqz9Xp1UKh-yPMohCOzQ8_8W5ApCffXeGTtIblKGTdNWmdgEQPnKCTXc154tIl2mlKZQpm5JeKuq86L8mvwm4tn9qDpQ2TDqu28JomWgqKuq8sbpduBRuqueSR.&spm=a1z10.3-c-s.w4002-24032463620.22.5bca5bdfVqJOHz&skuId=4324632572616

https://item.taobao.com/item.htm?_u=f1qf7bf50694&id=613911068384&pisk=gSTU_1GHO23eApO2CEbzb-J8iCbdWakjEU65ZQAlO9Xn26guzQRcNXH-9h5kFdh-9wOlULJ1Bz1SvYUyQpODAM9WATflIdAQRTgd4LRXHLaSJH1uzdORqLTywz5kZLhdFXn69BQRrxMfzqOp9cilFYTFZN2M6_PhZcs3YVRI1xMjl4o3sakEhp1TLYiGgsbltgfujf5Pgu2kEg4MsOCRZJfu-flNwOfht_XHs5flwJfHE_bGI61PtTfurOVGMOXlrM4n_CXOaxe6tQ4NGMczELR65DgEutRhQz4k-4Ll3AXA668aaMB2tFGETbCFYtAhQxC8uIIMwg88wzWHtnpRip2nhMdkbd5FzVZhoC-k31LnlJ59ACAfIIP8yB_e0E7HYAEORp8GSex4ZzAN89IlspyEQtYpsEQGfqc2sFpB9FR7Z4f6hOAp-aumMw7hKN59PAUhUhxkRMQ8KxspZhJNTZjrU8Cg7OYJY8qPx1CNhflwIy0uxDRZ8iE82GbA_tGCOuqueSfNhf8U2uIG_1WjOzf..&spm=a1z09.2.0.0.3f1f2e8dWmrgGf


控制代码1
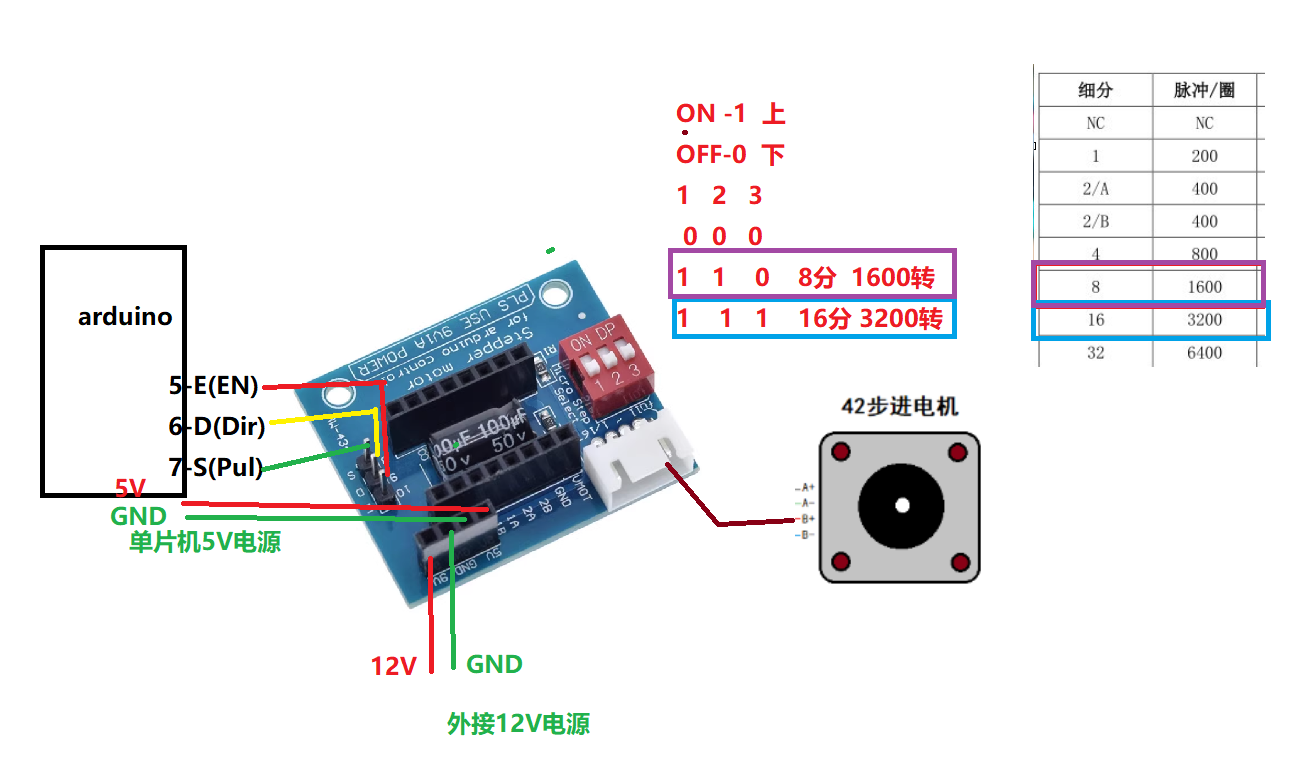
int PUL = 7; //定义脉冲引脚
int DIR = 6; //定义方向销
int ENA = 5; //定义启用引脚 低电平有效
int wait_time=2000;
/**
* TB6600驱动器 . 42两相四线步进电机
*/
void setup() {
pinMode (PUL, OUTPUT);
pinMode (DIR, OUTPUT);
pinMode (ENA, OUTPUT);
Serial.begin(9600);
// 初始化复位 - 转3圈
for (int i = 0; i < 1600; i++) //前进4800步 SW1=OFF,SW2=ON,SW3=OFF(每圈1600脉冲)
{
digitalWrite(DIR, LOW); // 定义正转
digitalWrite(ENA, 0);// 启动
digitalWrite(PUL, HIGH);// 输出脉冲
delayMicroseconds(wait_time);
digitalWrite(PUL, LOW);
delayMicroseconds(wait_time);
}
delay(2000);
Serial.println("开始");
}
void loop() {
Serial.println("前进");
for (int i = 0; i < 1600; i++) //正转1圈
{
digitalWrite(DIR, LOW);
digitalWrite(ENA, 0);
digitalWrite(PUL, HIGH);
delayMicroseconds(wait_time);
digitalWrite(PUL, LOW);
delayMicroseconds(wait_time);
}
delay(3000); // 暂停10秒
Serial.println("后退");
for (int i = 0; i < 1600; i++) //倒转1圈
{
digitalWrite(DIR, HIGH);
digitalWrite(ENA, 0);
digitalWrite(PUL, HIGH);
delayMicroseconds(wait_time);
digitalWrite(PUL, LOW);
delayMicroseconds(wait_time);
}
delay(3000); // 暂停10秒
}
控制代码2
输入0-1米 自动根据转化到角度
int PUL = PB7; // 定义脉冲引脚
int DIR = PB6; // 定义方向引脚
int ENA = PB5; // 定义启用引脚,低电平有效
int wait_time = 2000;
const int stepsPerRevolution = 1600; // 每圈1600步
const float maxDistance = 1.0; // 8米最大距离
int current_step=0;
void setup() {
pinMode(PUL, OUTPUT);
pinMode(DIR, OUTPUT);
pinMode(ENA, OUTPUT);
digitalWrite(PUL, HIGH);// 低电平
digitalWrite(DIR, HIGH);// 默认反方向
digitalWrite(ENA, HIGH);// 关闭电机
Serial.begin(9600);
Serial.println("输入距离 (0-8米):");
}
void loop() {
if (Serial.available() > 0) {
float distance = Serial.parseFloat(); // 读取串口输入的距离
if (distance >= 0 && distance <= maxDistance) {
int stepsToMove = map(distance*1000 , 0, maxDistance*1000 , 0, stepsPerRevolution); // 映射到步数
int move_step=stepsToMove-current_step;
Serial.print("移动步数: ");
Serial.println(move_step);
moveStepper(move_step);
current_step=stepsToMove;
} else {
Serial.println("无效输入,请输入0-1米之间的数值。");
}
}
}
void moveStepper(int steps) {
bool direction = steps >= 0;
digitalWrite(DIR, direction ? LOW : HIGH); // 设定方向
digitalWrite(ENA, LOW); // 使能电机
for (int i = 0; i < abs(steps); i++) {
digitalWrite(PUL, HIGH);
delayMicroseconds(wait_time);
digitalWrite(PUL, LOW);
delayMicroseconds(wait_time);
}
digitalWrite(ENA, HIGH);// 关闭电机
delayMicroseconds(2000);
}
例子3 通过激光测距 动态调整步进电机的步数
int PUL = PB7; // 定义脉冲引脚
int DIR = PB6; // 定义方向引脚
int ENA = PB5; // 定义启用引脚,低电平有效
int wait_time = 2000;
const int stepsPerRevolution = 1600; // 每圈1600步
const float maxDistance = 1000; // 8米最大距离
int current_step=0;
#define START_BYTE 0xAA // 帧头字节
#define FRAME_SIZE 195 // 总数据长度
uint8_t frameBuffer[FRAME_SIZE]; // 用于存储一帧数据
bool capturing = false; // 是否在捕获数据
uint8_t index_ = 0; // 数据索引
uint16_t f_distance=0; // 测量的距离
void moveStepper(int steps) {
if (abs(steps)<6){
digitalWrite(ENA, HIGH);//关闭电机
Serial.println("移动步数: 0");
return;
}
bool direction = steps >= 0;
if(direction){
Serial.print("移动步数: 往前");Serial.println(steps);
}
else{
Serial.print("移动步数: 往后");Serial.println(steps);
}
digitalWrite(DIR, direction ? LOW : HIGH); // 设定方向
digitalWrite(ENA, LOW); // 使能电机
for (int i = 0; i < abs(steps); i++) {
digitalWrite(PUL, HIGH);
delayMicroseconds(wait_time);
digitalWrite(PUL, LOW);
delayMicroseconds(wait_time);
}
digitalWrite(ENA, HIGH);// 关闭电机
delayMicroseconds(2000);
}
void printFrame() {
// Serial.println("完整数据帧:");
// 发送数据到 Python 格式解析
// Serial.print("Data: ");
// for (int i = 0; i < FRAME_SIZE; i++) {
// Serial.print(frameBuffer[i], HEX);
// Serial.print(" ");
// }
// Serial.println();
// 解析数据
//Serial.println("解析后的测量数据:");
for (int i = 10; i < FRAME_SIZE; i += 15) {
if (i + 15 < FRAME_SIZE) { // 确保不会越界
// 解析距离 distance
uint16_t distance = (frameBuffer[i + 1] << 8) | frameBuffer[i];
f_distance=distance;
// 解析环境噪声 noise
uint16_t noise = (frameBuffer[i + 3] << 8) | frameBuffer[i + 2];
// 解析接收强度 peak
uint32_t peak = (frameBuffer[i + 7] << 24) | (frameBuffer[i + 6] << 16) |
(frameBuffer[i + 5] << 8) | frameBuffer[i + 4];
// 解析置信度 confidence
uint8_t confidence = frameBuffer[i + 8];
// 解析积分次数 intg
uint32_t intg = (frameBuffer[i + 12] << 24) | (frameBuffer[i + 11] << 16) |
(frameBuffer[i + 10] << 8) | frameBuffer[i + 9];
// 解析温度表征值 reftof
uint16_t reftof = (frameBuffer[i + 14] << 8) | frameBuffer[i + 13];
// 打印解析后的数据
//Serial.print("距离: "); Serial.println(distance);
// Serial.print(" | 噪声: "); Serial.print(noise);
// Serial.print(" | 强度: "); Serial.print(peak);
// Serial.print(" | 置信度: "); Serial.print(confidence);
// Serial.print(" | 积分次数: "); Serial.print(intg);
// Serial.print(" | 温度: "); Serial.println(reftof);
}
}
//Serial.println("\n--- End of Frame ---");
}
void Read_distance(uint8_t byteReceived){
if (!capturing) {
// 进入帧头检测
static uint8_t headerBuffer[4] = {0};
headerBuffer[0] = headerBuffer[1];
headerBuffer[1] = headerBuffer[2];
headerBuffer[2] = headerBuffer[3];
headerBuffer[3] = byteReceived;
if (headerBuffer[0] == START_BYTE && headerBuffer[1] == START_BYTE &&
headerBuffer[2] == START_BYTE && headerBuffer[3] == START_BYTE) {
// 发现帧头,开始接收数据
capturing = true;
index_ = 4;
memcpy(frameBuffer, headerBuffer, 4);
}
} else {
// 继续存储数据
frameBuffer[index_++] = byteReceived;
// 收到完整一帧数据
if (index_ >= FRAME_SIZE) {
capturing = false;
printFrame(); // 打印数据帧
if(f_distance>8000){
// 数据无效
}
else{
Serial.print("距离: "); Serial.println(f_distance);
// 在这里去做后续的事情
// 完整解析数据后在做动作
float distance = f_distance; // 读取串口输入的距离
if (distance >= 0 && distance <= maxDistance) {
} else {
distance=maxDistance;
}
int stepsToMove = map(distance , 0, maxDistance , 0, stepsPerRevolution); // 映射到步数
int move_step=stepsToMove-current_step;
moveStepper(move_step);
current_step=stepsToMove;
}
}
}
}
void setup() {
pinMode(PUL, OUTPUT);
pinMode(DIR, OUTPUT);
pinMode(ENA, OUTPUT);
digitalWrite(PUL, HIGH);// 低电平
digitalWrite(DIR, HIGH);// 默认反方向
digitalWrite(ENA, HIGH);// 关闭电机
Serial.begin(9600);
Serial.println("输入距离 (0-8米):");
Serial2.begin(230400); // 设备串口
}
void loop() {
while (Serial2.available()) {
uint8_t byteReceived = Serial2.read();
Read_distance(byteReceived);
}
// 不要做其他动作干扰数据解析
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号