

https://blog.csdn.net/qq_35591253/article/details/140580666
环境
树莓派5b
ubuntu20.04 tls长期稳定版本
miniconda 默认环境
python3.11 (python3.7不行)
后期自动暗转ncnn 转换加速模型库
(系统5B刷好可以直接用在4B,但是aconda必须重装,不然运行报错核心错误。)
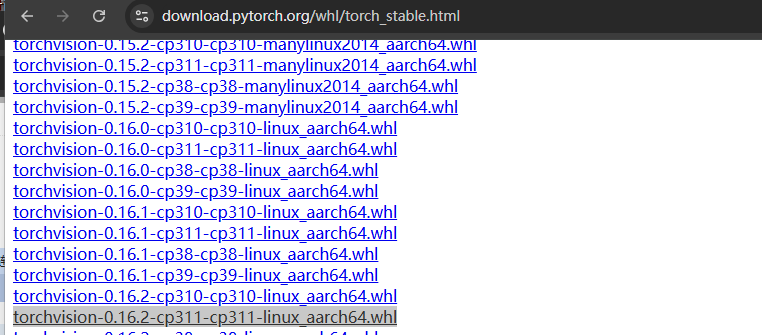
1下载
https://download.pytorch.org/whl/torch_stable.html
[TMVA] 要求 torch<2.5 否则在 ARM 上会提示错误 root-project/root#16718

2降级 numpy 到1.0版本 不要超过2
pip uninstall numpy pip install -U numpy==1.26.4
3 安装torch库
pip install 安装包
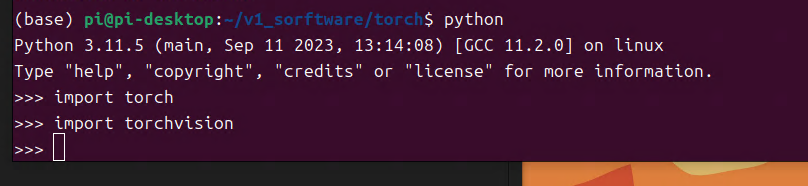
检查是否成功
python import torch import torchvision exit()
4 部署yolo
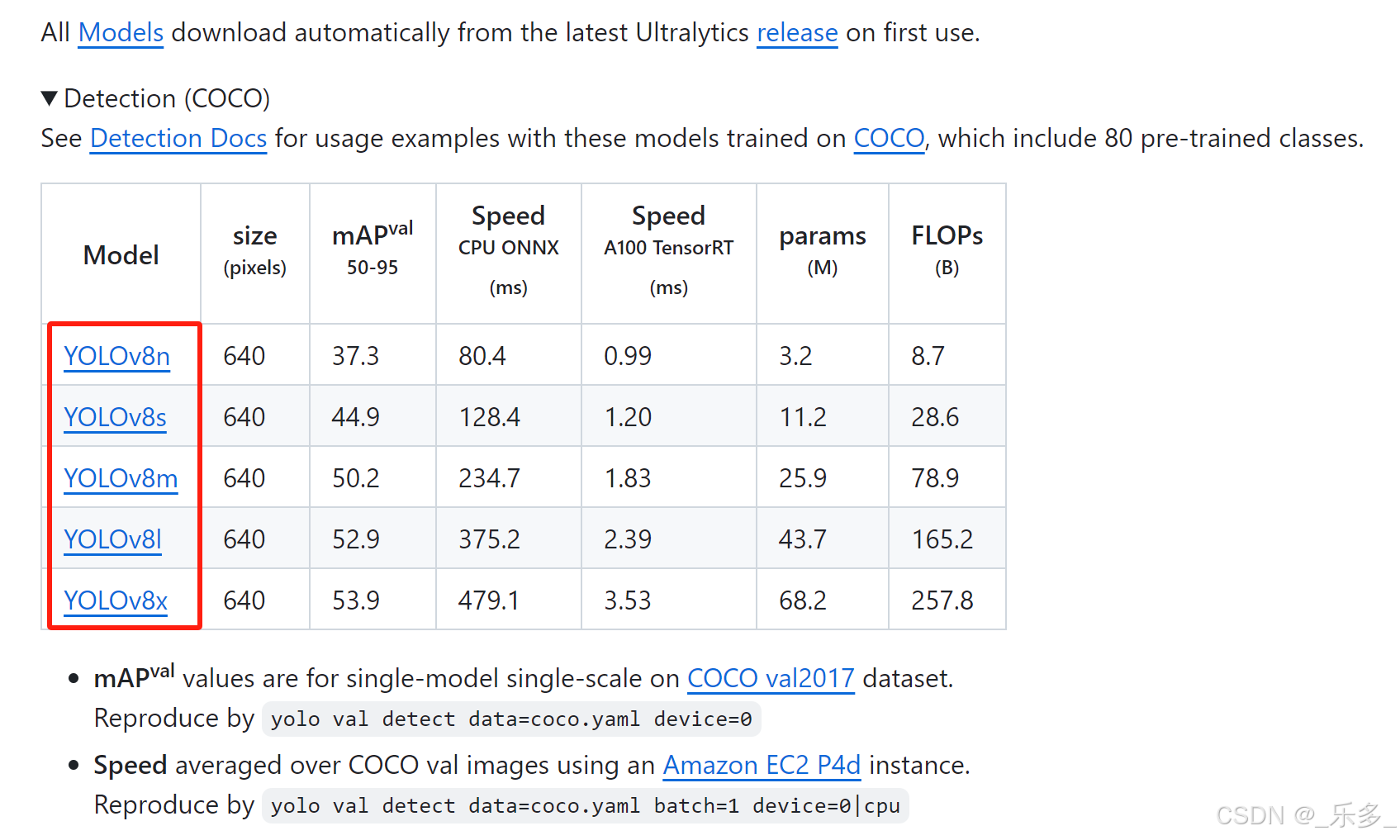
一、下载YOLO权重文件
https://github.com/ultralytics/ultralytics?tab=readme-ov-file
拉到网页最下面,选择适合的模型,下载到本地
二、环境配置
安装以下两个库
pip install ultralytics pip install opencv-python
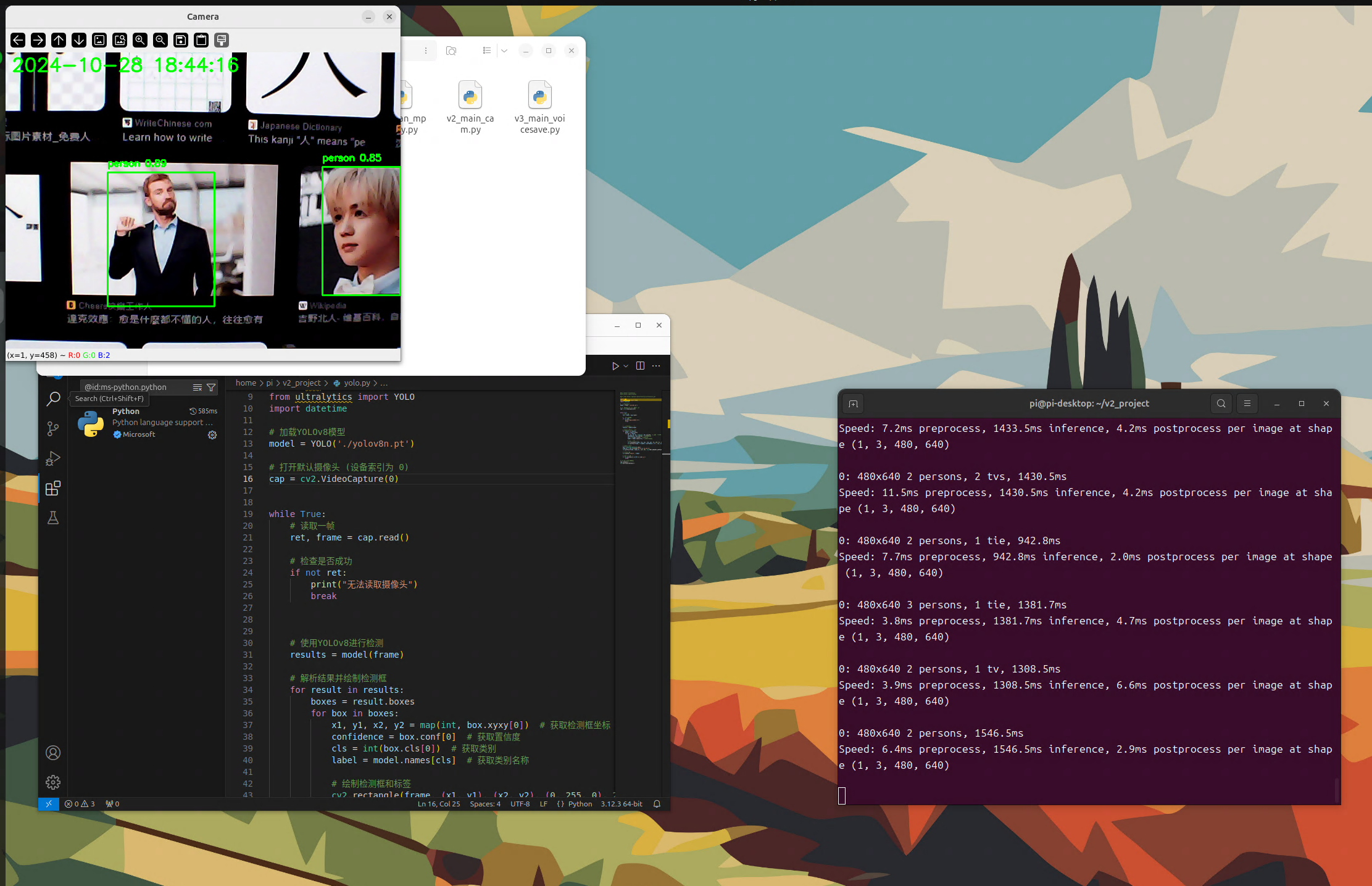
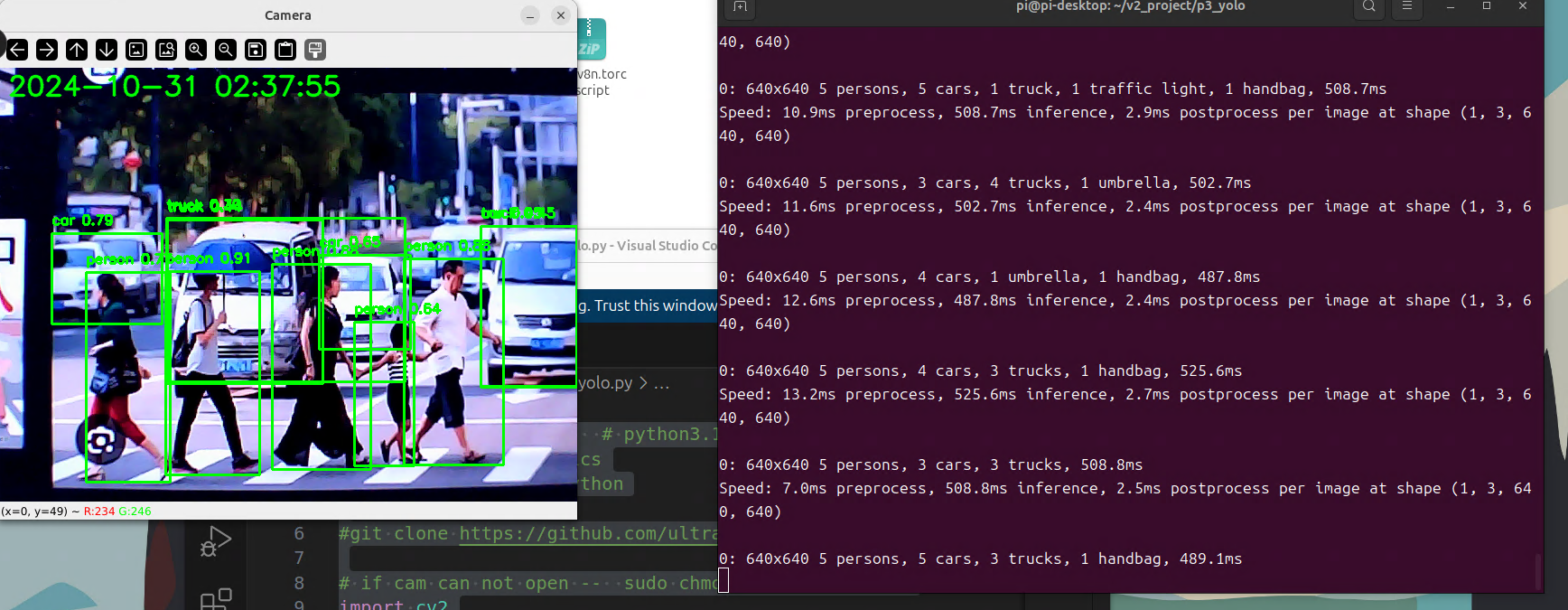
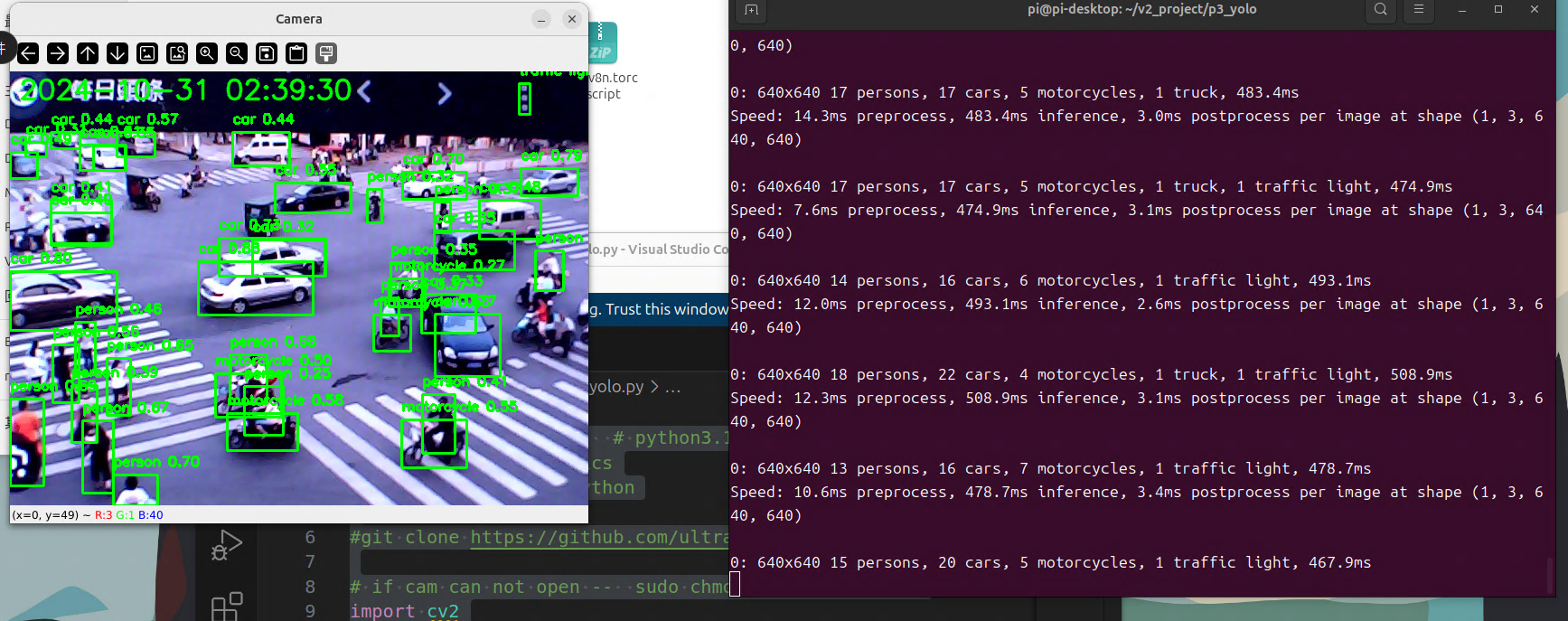
代码1 纯pytorch运行
# conda activate base # python3.11
#pip install ultralytics
#pip install opencv-python
#git clone https://github.com/ultralytics/ultralytics.git
# if cam can not open -- sudo chmod 777 /dev/video0
import cv2
from ultralytics import YOLO
import datetime
# 加载YOLOv8模型
model = YOLO('./yolov8n.pt')
# 打开默认摄像头 (设备索引为 0)
cap = cv2.VideoCapture(0)
while True:
# 读取一帧
ret, frame = cap.read()
# 检查是否成功
if not ret:
print("无法读取摄像头")
break
# 使用YOLOv8进行检测
results = model(frame)
# 解析结果并绘制检测框
for result in results:
boxes = result.boxes
for box in boxes:
x1, y1, x2, y2 = map(int, box.xyxy[0]) # 获取检测框坐标
confidence = box.conf[0] # 获取置信度
cls = int(box.cls[0]) # 获取类别
label = model.names[cls] # 获取类别名称
# 绘制检测框和标签
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.putText(frame, f"{label} {confidence:.2f}", (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
# 获取当前时间
now = datetime.datetime.now()
time_str = now.strftime("%Y-%m-%d %H:%M:%S")
cv2.putText(frame, time_str, (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA)
# 显示当前帧
cv2.imshow('Camera', frame)
# 按下 'q' 键退出
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放摄像头并关闭窗口
cap.release()
cv2.destroyAllWindows()
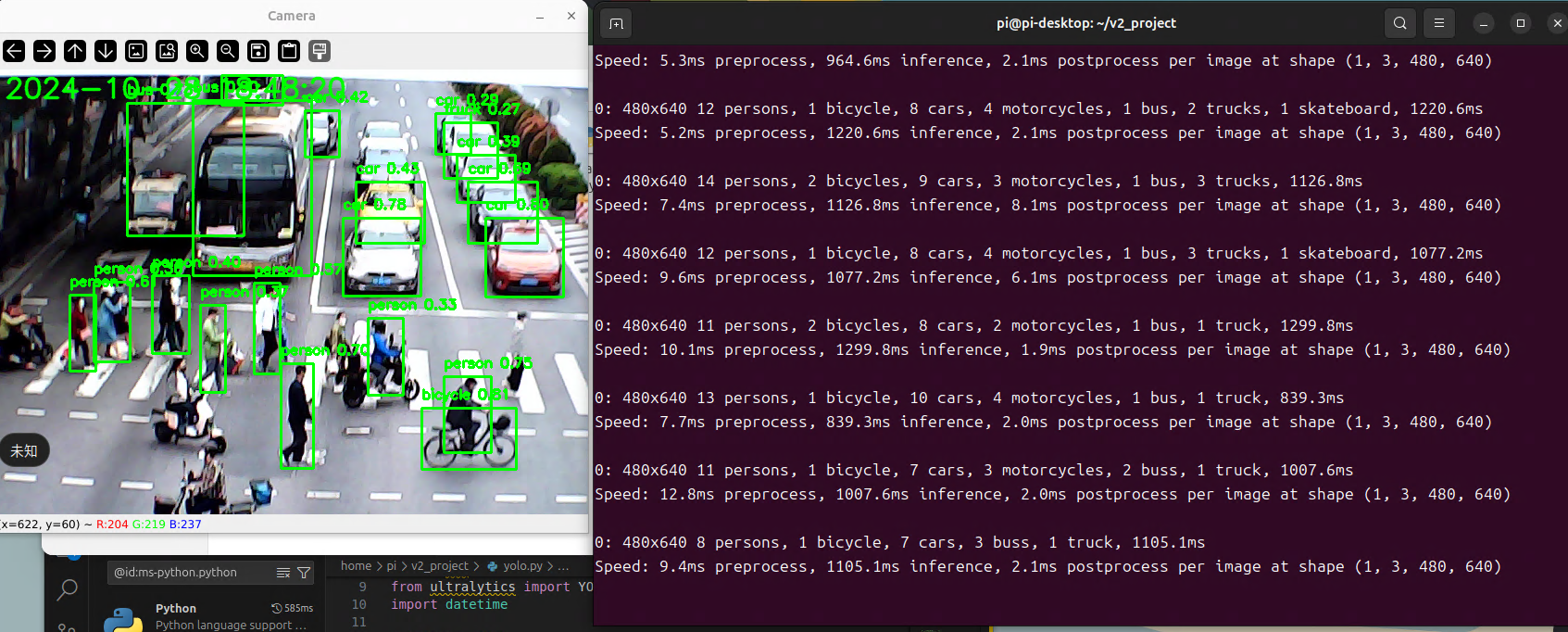
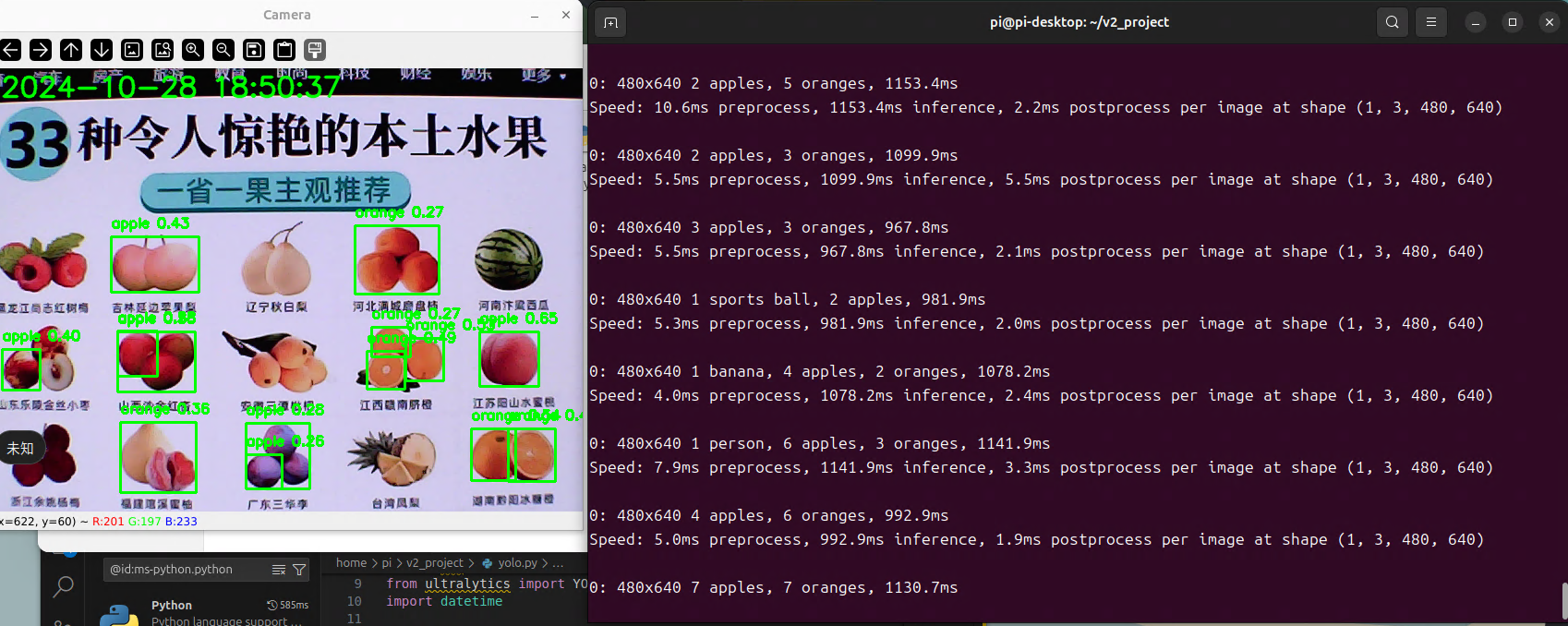
树莓派5B 速度
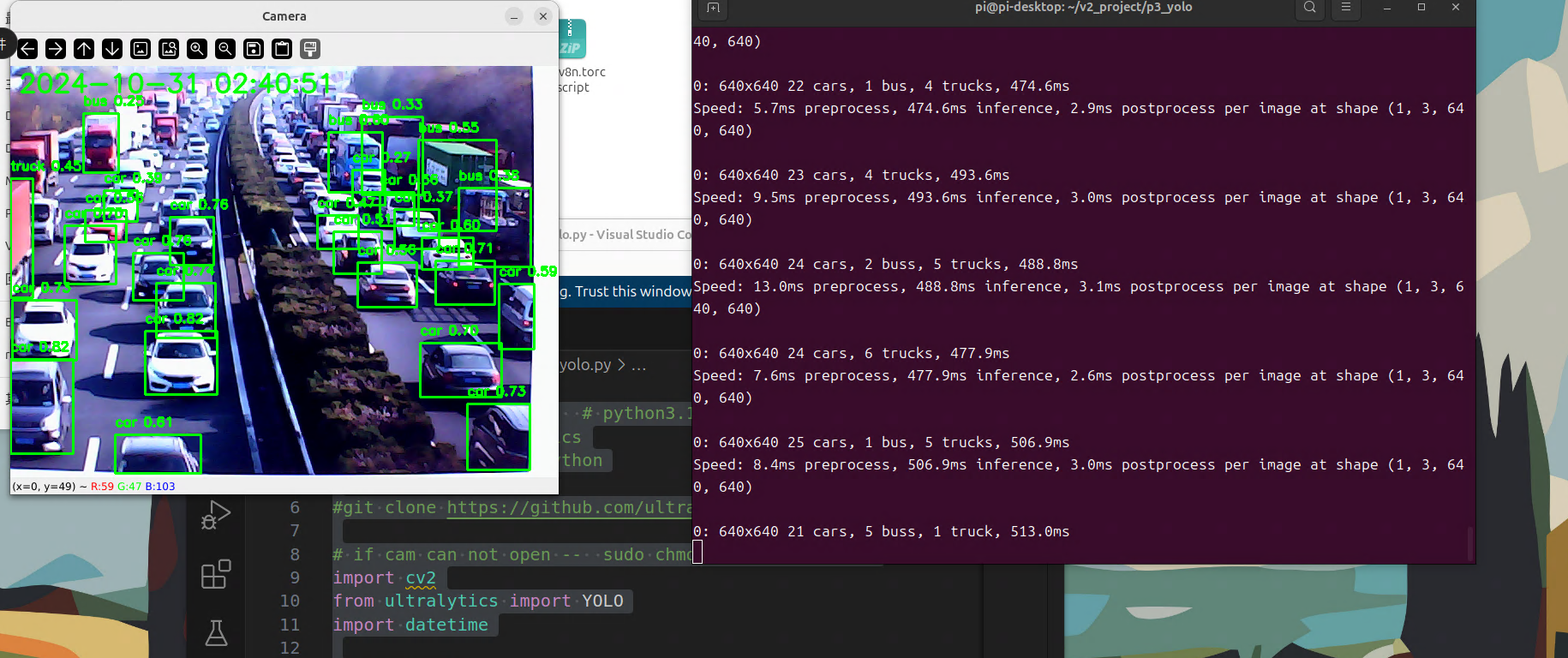
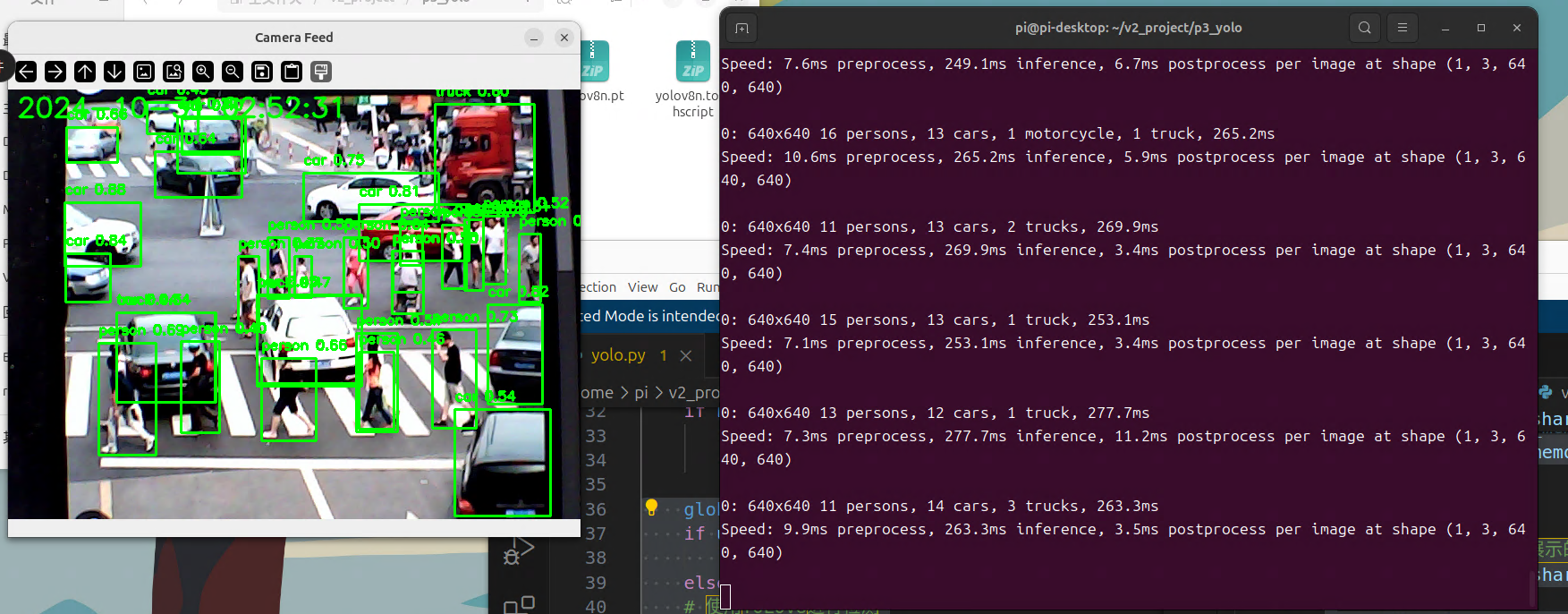
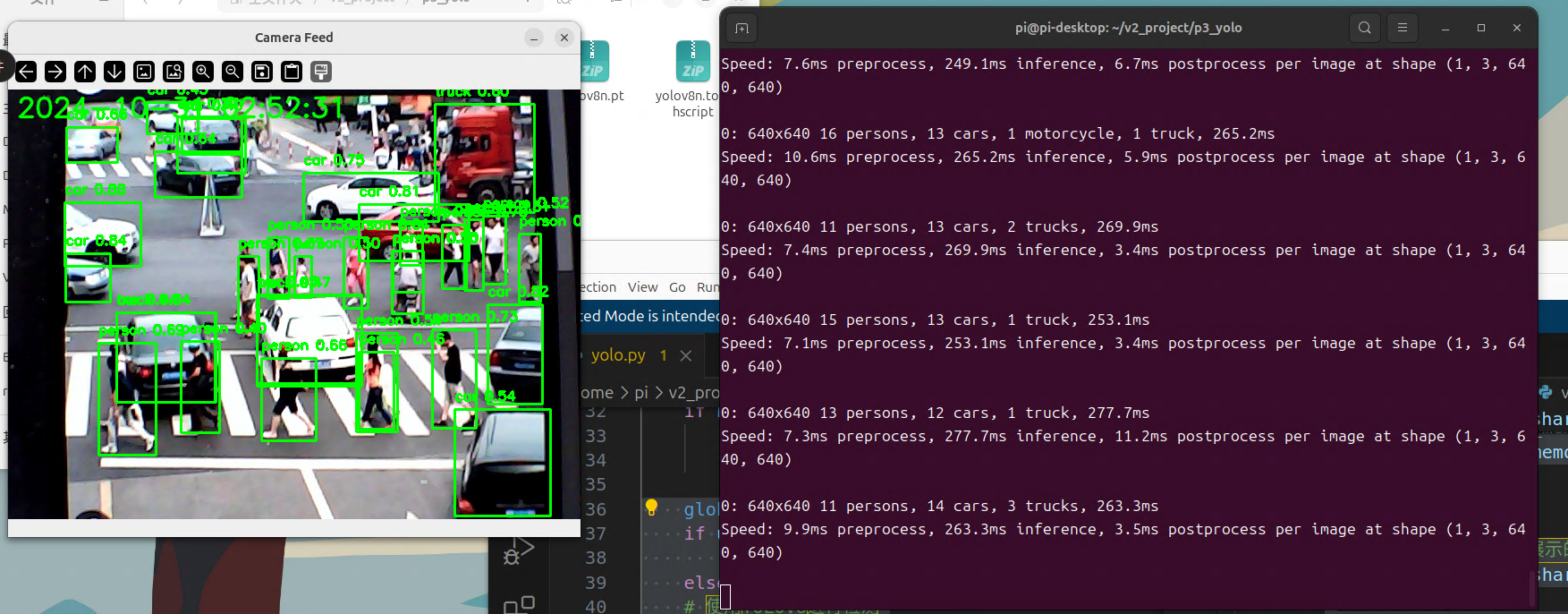
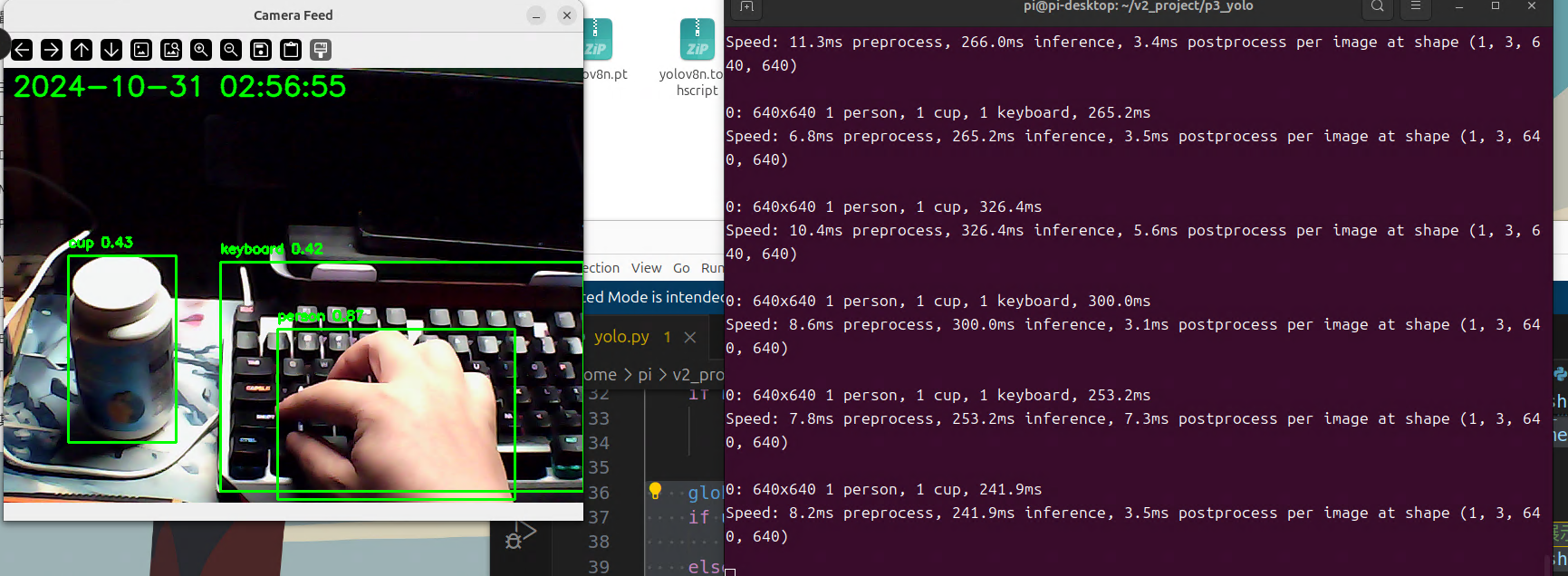
代码2 转换ncnn模型加速运行
貌似加速了一倍,后期再配合多线程处理
# conda activate base # python3.11
#pip install ultralytics
#pip install opencv-python
#git clone https://github.com/ultralytics/ultralytics.git
# if cam can not open -- sudo chmod 777 /dev/video0
import cv2
from ultralytics import YOLO
import datetime
use_ncnn = 1
# 加载YOLOv8模型
model = YOLO('./yolov8n.pt')
# Export the model to NCNN format
model.export(format="ncnn") # creates 'yolo11n_ncnn_model'
# Load the exported NCNN model
ncnn_model = YOLO("yolov8n_ncnn_model")
# 打开默认摄像头 (设备索引为 0)
cap = cv2.VideoCapture(0)
while True:
# 读取一帧
ret, frame = cap.read()
# 检查是否成功
if not ret:
print("无法读取摄像头")
break
global results
if use_ncnn==1:
results = ncnn_model(frame)
else:
# 使用YOLOv8进行检测
results = model(frame)
# 解析结果并绘制检测框
for result in results:
boxes = result.boxes
for box in boxes:
x1, y1, x2, y2 = map(int, box.xyxy[0]) # 获取检测框坐标
confidence = box.conf[0] # 获取置信度
cls = int(box.cls[0]) # 获取类别
label = model.names[cls] # 获取类别名称
# 绘制检测框和标签
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.putText(frame, f"{label} {confidence:.2f}", (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
# 获取当前时间
now = datetime.datetime.now()
time_str = now.strftime("%Y-%m-%d %H:%M:%S")
cv2.putText(frame, time_str, (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA)
# 显示当前帧
cv2.imshow('Camera', frame)
# 按下 'q' 键退出
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放摄像头并关闭窗口
cap.release()
cv2.destroyAllWindows()
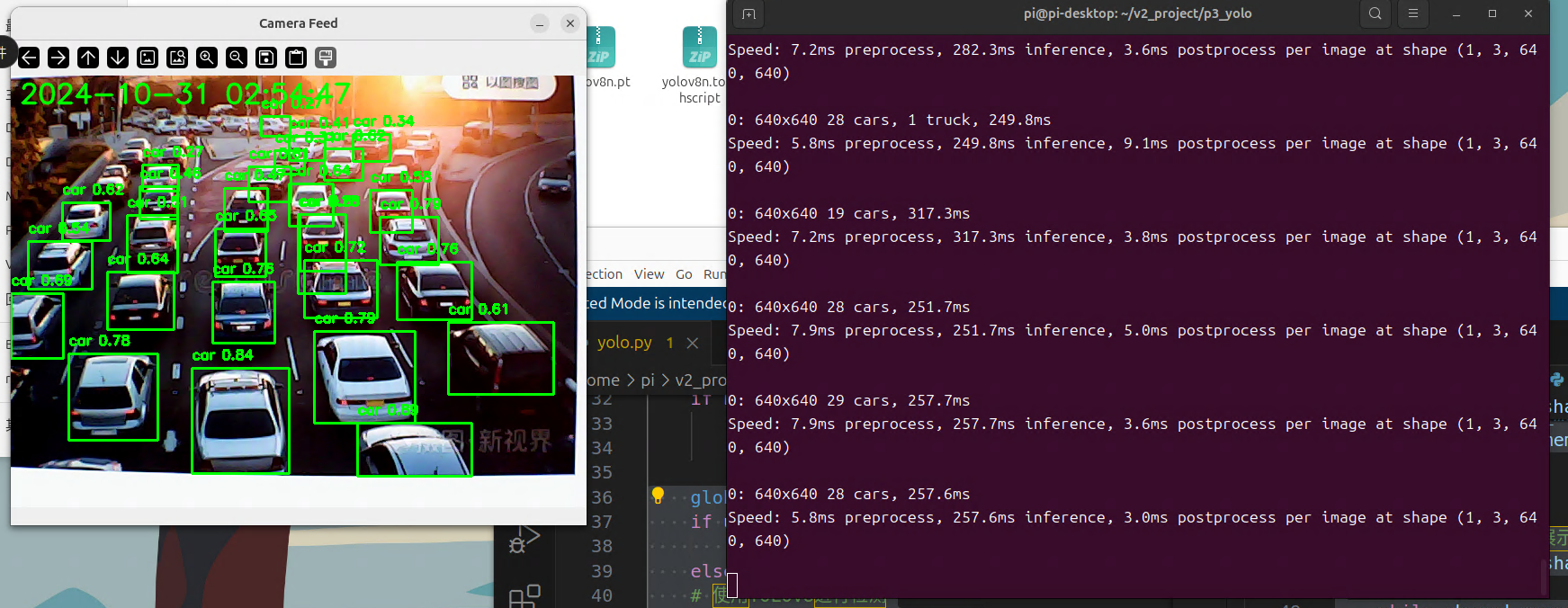
代码3 多线程加速
貌似到了200ms一帧
import cv2
import threading
import numpy as np
from ultralytics import YOLO
import datetime
use_ncnn = 1
# 加载YOLOv8模型
model = YOLO('./yolov8n.pt')
# Export the model to NCNN format
model.export(format="ncnn") # creates 'yolo11n_ncnn_model'
# Load the exported NCNN model
ncnn_model = YOLO("yolov8n_ncnn_model")
# 共享内存类
class SharedMemory:
def __init__(self):
self.frame = None
self.lock = threading.Lock()
self.running = True # 添加运行状态标志
# 从 USB 相机读取图像的线程
def capture_thread(shared_memory):
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("无法打开相机")
return
while shared_memory.running:
ret, frame = cap.read()
if not ret:
print("无法读取图像")
break
# 将图像存储到共享内存
with shared_memory.lock:
shared_memory.frame = frame.copy()
cap.release()
# 从共享内存读取图像并展示的线程
def display_thread(shared_memory):
while shared_memory.running:
with shared_memory.lock:
if shared_memory.frame is not None:
global results
if use_ncnn==1:
results = ncnn_model(shared_memory.frame)
else:
# 使用YOLOv8进行检测
results = model(shared_memory.frame)
frame = shared_memory.frame
# 解析结果并绘制检测框
for result in results:
boxes = result.boxes
for box in boxes:
x1, y1, x2, y2 = map(int, box.xyxy[0]) # 获取检测框坐标
confidence = box.conf[0] # 获取置信度
cls = int(box.cls[0]) # 获取类别
label = model.names[cls] # 获取类别名称
# 绘制检测框和标签
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.putText(frame, f"{label} {confidence:.2f}", (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
# 获取当前时间
now = datetime.datetime.now()
time_str = now.strftime("%Y-%m-%d %H:%M:%S")
cv2.putText(frame, time_str, (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA)
cv2.imshow('Camera Feed', frame)
# 检查按键是否为 'q'
if cv2.waitKey(1) & 0xFF == ord('q'):
shared_memory.running = False # 设置运行状态为 False
break
cv2.destroyAllWindows()
# 主函数
if __name__ == "__main__":
shared_memory = SharedMemory()
# 启动捕获线程
capture_thread = threading.Thread(target=capture_thread, args=(shared_memory,))
capture_thread.start()
# 启动显示线程
display_thread = threading.Thread(target=display_thread, args=(shared_memory,))
display_thread.start()
capture_thread.join()
display_thread.join()
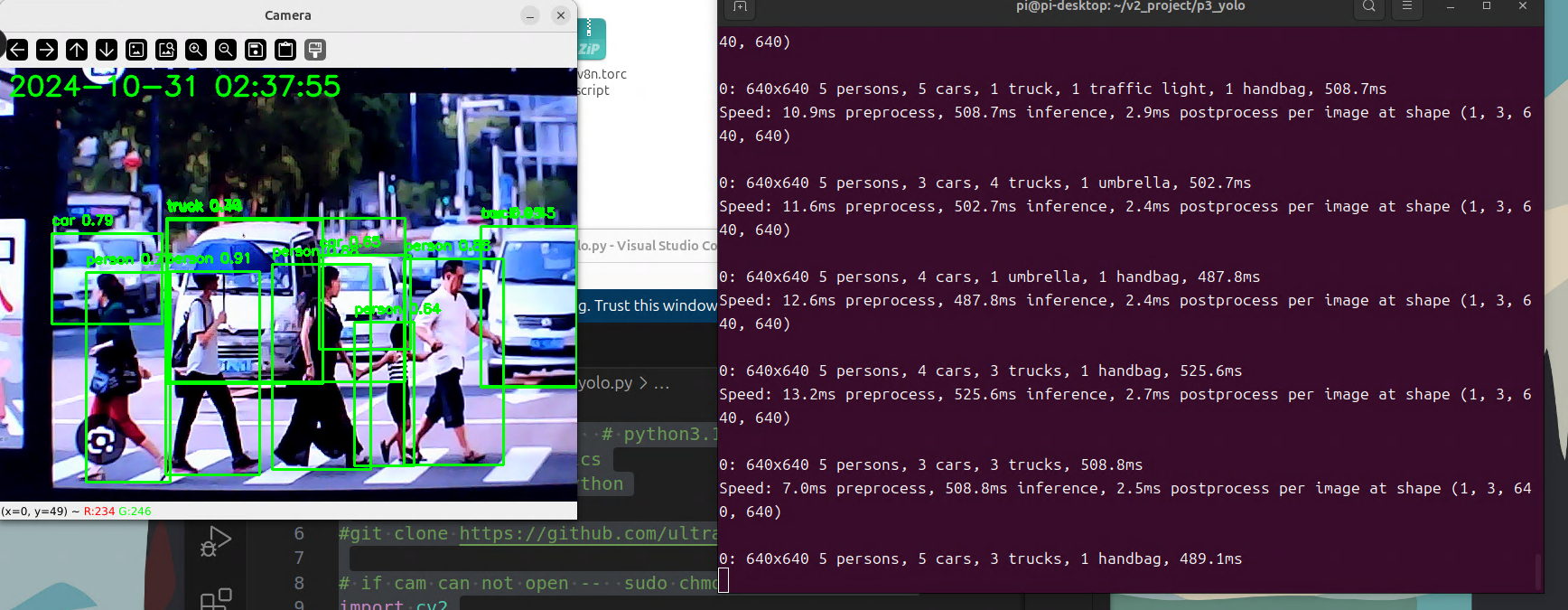
树莓派4B速度
500-780ms 秒 1张 640*480
未来
1 yolo模型转换onnx加速运行
https://docs.ultralytics.com/guides/raspberry-pi/#raspberry-pi-5-yolo11-benchmarks
下载
https://github.com/pnnx/pnnx/releases/download/20240819/pnnx-20240819-linux-aarch64.zip
安装
比较图表
我们仅包含了 YOLO11n 和 YOLO11s 模型的基准测试,因为其他模型太大,无法在 Raspberry Pi 上运行,并且无法提供良好的性能。
问题汇总
问题1 usb相机打不开 权限问题
检查依赖库是不是装齐了 ,尝试装库
sudo apt-get install v4l-utils
# sudo chmod 777 /dev/video0 权限
长期给与
最有可能是一个权限问题/dev/video0。
检查您是否属于“视频”群组。id -a
如果你在群组列表中没有看到视频,请添加 sudo usermod -a -G video
对于 Ubuntu 用户:(20.04)sudo usermod -a -G video $LOGNAME
注销并重新登录并尝试一下。
问题2 numpty适配torch和torchvision 必须是1.版本不能是2
问题3

 浙公网安备 33010602011771号
浙公网安备 33010602011771号