

编译

脚本
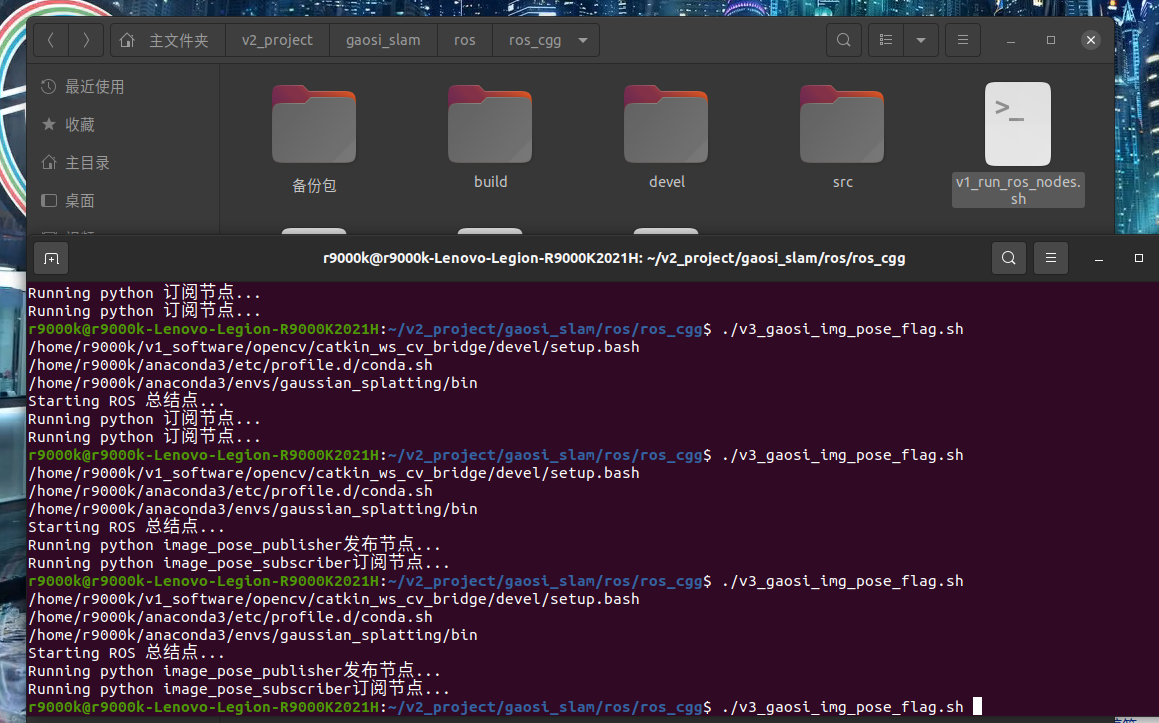
v3_gaosi_img_pose_flag.sh
#!/bin/bash
#外部给与执行权限
#sudo chmod +x run_ros_nodes.sh
# 定义 ROS 安装路径 #安装时候添加到系统路径了 不需要每次都source
ROS_SETUP="/opt/ros/noetic/setup.bash"
# 定义工作目录路径 自己的工程没有加到系统路径,每次需要source
WORKSPACE_DIR="/home/r9000k/v2_project/gaosi_slam/ros/ros_cgg"
conda_envs="/home/r9000k/anaconda3" # 修改2-1 自己的conda 安装路径
#ROS_cv_briage_dir="/home/r9000k/v1_software/opencv/catkin_ws_cv_bridge/devel/setup.bash" # 修改2-2 自己编译的cv_briage包节点,貌似不用也行 制定了依赖opencv3.4.9 而非自带4.2
#echo $ROS_cv_briage_dir
conda_envs_int=$conda_envs"/etc/profile.d/conda.sh" # 不用改 conda自带初始化文件
echo $conda_envs_int
conda_envs_bin=$conda_envs"/envs/gaussian_splatting/bin" # 不用改 conda自带python安装位置 脚本中需要指定是conda特定的环境python而不是系统默认的
echo $conda_envs_bin
ROS_SETUP="/opt/ros/noetic/setup.bash" #不用改 安装时候添加到系统路径了 不需要每次都source 这里留着
#指定目录
# 启动 ROS Master
echo "Starting ROS 总结点..."
gnome-terminal -- bash -c "\
cd $WORKSPACE_DIR; source devel/setup.bash; \
roscore; \
exec bash"
# 等待 ROS Master 启动
sleep 3
# 运行 C++ 发布节点
# echo "Running C++ 发布节点..."
# gnome-terminal -- bash -c "\
# cd $WORKSPACE_DIR; source devel/setup.bash; \
# rosrun gaosi_img_pose_flag image_pose_flag_publisher; \
# exec bash"
# echo "Running C++ 订阅节点..."
# gnome-terminal -- bash -c "\
# cd $WORKSPACE_DIR; source devel/setup.bash; \
# rosrun gaosi_img_pose_flag image_pose_flag_subscriber; \
# exec bash"
# 运行python节点
python_DIR="${WORKSPACE_DIR}/src/gaosi_img_pose_flag/src"
echo "Running python image_pose_publisher发布节点..."
gnome-terminal -- bash -c " \
cd $WORKSPACE_DIR; source devel/setup.bash; \
source $conda_envs_int; \
conda activate gaussian_splatting ; \
cd $python_DIR; \
/usr/bin/python3 image_pose_publisher.py; \
exec bash"
# 运行python节点
echo "Running python image_pose_subscriber订阅节点..."
gnome-terminal -- bash -c " \
cd $WORKSPACE_DIR; source devel/setup.bash; \
source $conda_envs_int; \
conda activate gaussian_splatting ; \
cd $python_DIR; \
/usr/bin/python3 image_pose_subscriber.py; \
exec bash"
包

1 创建自定义消息
ImagePose.msg
# ImagePose.msg sensor_msgs/Image image std_msgs/Float64 flag geometry_msgs/Pose pose

CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(gaosi_img_pose_flag)
find_package(catkin REQUIRED COMPONENTS
roscpp
geometry_msgs
sensor_msgs
cv_bridge
message_filters # 消息同步
image_transport
std_msgs # 自定义消息
message_generation # 自定义消息
)
# 自定义消息
add_message_files(
FILES
ImagePose.msg
)
# 自定义消息
generate_messages(
DEPENDENCIES
std_msgs
sensor_msgs
geometry_msgs
)
find_package(OpenCV REQUIRED)
find_package(Boost REQUIRED COMPONENTS filesystem)
find_package(Eigen3 REQUIRED)
catkin_package(
CATKIN_DEPENDS roscpp geometry_msgs sensor_msgs cv_bridge std_msgs message_runtime
DEPENDS Boost
)
include_directories(
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
${Boost_INCLUDE_DIRS}
"/usr/local/include/eigen3"
)
# 编译发布节点
add_executable(image_pose_flag_publisher src/image_pose_flag_publisher.cpp)
# 自定义消息引用
add_dependencies(image_pose_flag_publisher ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(image_pose_flag_publisher
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
${Boost_LIBRARIES}
)
add_executable(image_pose_flag_subscriber src/image_pose_flag_subscriber.cpp)
add_dependencies(image_pose_flag_subscriber ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(image_pose_flag_subscriber ${catkin_LIBRARIES} ${OpenCV_LIBRARIES})

package.xml
<?xml version="1.0"?>
<package format="2">
<name>gaosi_img_pose_flag</name>
<version>0.0.1</version>
<description>
A package to publish and subscribe to images and GPS data using ROS.
</description>
<!-- Maintainer of the package -->
<maintainer email="your_email@example.com">Your Name</maintainer>
<!-- License of the package -->
<license>MIT</license>
<!-- Build tool required to build this package -->
<buildtool_depend>catkin</buildtool_depend>
<!-- Dependencies of the package during build and runtime -->
<build_depend>roscpp</build_depend>
<build_depend>sensor_msgs</build_depend>
<build_depend>cv_bridge</build_depend>
<build_depend>eigen</build_depend>
<build_depend>geometry_msgs</build_depend>
<build_depend>message_filters</build_depend>
<build_depend>image_transport</build_depend>
<!--自定义消息 -->
<build_depend>message_generation</build_depend>
<build_depend>message_runtime</build_depend>
<build_depend>std_msgs</build_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>sensor_msgs</exec_depend>
<exec_depend>cv_bridge</exec_depend>
<exec_depend>eigen</exec_depend>
<exec_depend>geometry_msgs</exec_depend>
<exec_depend>message_filters</exec_depend>
<exec_depend>image_transport</exec_depend>
<!--自定义消息 -->
<exec_depend>message_generation</exec_depend>
<exec_depend>message_runtime</exec_depend>
<exec_depend>std_msgs</exec_depend>
<!-- Declare additional dependencies required for building this package -->
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>sensor_msgs</build_export_depend>
<build_export_depend>cv_bridge</build_export_depend>
<build_export_depend>eigen</build_export_depend>
<build_export_depend>geometry_msgs</build_export_depend>
<build_export_depend>message_filters</build_export_depend>
<build_export_depend>image_transport</build_export_depend>
<!--自定义消息 -->
<build_export_depend>message_generation</build_export_depend>
<build_export_depend>message_runtime</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<!-- Export information, can be used by other packages -->
<export>
<!-- Export any specific information here -->
</export>
</package>


image_pose_publisher.py
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import Image
from std_msgs.msg import Float64
from geometry_msgs.msg import Pose
from gaosi_img_pose_flag.msg import ImagePose # 更换为你包的名字
from cv_bridge import CvBridge
import numpy as np
import cv2
class ImagePosePublisher:
def __init__(self):
# Initialize node
rospy.init_node('image_pose_publisher', anonymous=True)
# Initialize publishers
self.pub = rospy.Publisher('image_pose_topic', ImagePose, queue_size=10)
# Create a bridge between OpenCV and ROS
self.bridge = CvBridge()
# Create or load a sample image
self.image = np.zeros((480, 640, 3), dtype=np.uint8) # Black image
# Set flag
self.flag = Float64()
self.flag.data = 1.23 # Example double value
# Set pose
self.pose = Pose()
self.pose.position.x = 1.0
self.pose.position.y = 2.0
self.pose.position.z = 3.0
self.pose.orientation.x = 0.0
self.pose.orientation.y = 0.0
self.pose.orientation.z = 0.0
self.pose.orientation.w = 1.0
# Set publish rate
self.rate = rospy.Rate(10) # 10 Hz
self.publish()
def publish(self):
while not rospy.is_shutdown():
msg = ImagePose()
# Convert OpenCV image to ROS image message
msg.image = self.bridge.cv2_to_imgmsg(self.image, encoding="bgr8")
msg.flag = self.flag
msg.pose = self.pose
# Publish message
self.pub.publish(msg)
self.rate.sleep()
if __name__ == '__main__':
try:
ImagePosePublisher()
except rospy.ROSInterruptException:
pass
image_pose_subscriber.py

image_pose_subscriber.py 例子0 工程多线程加速版本
#include <ros/ros.h>
#include <gaosi_img_pose_flag/ImagePose.h> // 更换为你包的名字
#include <queue>
#include <mutex>
#include <thread>
#include <iostream>
// Global variables
std::queue<gaosi_img_pose_flag::ImagePose::ConstPtr> data_queue;
std::mutex queue_mutex;
// Callback function to handle incoming messages
void callback(const gaosi_img_pose_flag::ImagePose::ConstPtr& msg)
{
std::lock_guard<std::mutex> lock(queue_mutex);
data_queue.push(msg);
}
// Thread function to process the queue
void processQueue()
{
while (ros::ok())
{
std::queue<gaosi_img_pose_flag::ImagePose::ConstPtr> local_queue;
{
std::lock_guard<std::mutex> lock(queue_mutex);
std::swap(local_queue, data_queue); // Safely access the queue
}
while (!local_queue.empty())
{
auto msg = local_queue.front();
local_queue.pop();
// Process the message
ROS_INFO("Processing flag: %.2f", msg->flag.data);
ROS_INFO("Processing pose: Position(%.2f, %.2f, %.2f), Orientation(%.2f, %.2f, %.2f, %.2f)",
msg->pose.position.x, msg->pose.position.y, msg->pose.position.z,
msg->pose.orientation.x, msg->pose.orientation.y, msg->pose.orientation.z, msg->pose.orientation.w);
}
// Optional: Sleep to avoid busy waiting
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
}
void spinThread()
{
ros::spin();// 处理回调函数积累消息
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_pose_processor");
ros::NodeHandle nh;
// Initialize the subscriber
ros::Subscriber sub = nh.subscribe("image_pose_topic", 10, callback);
// Create a thread to process the queue
std::thread processing_thread(processQueue);
// Start a thread to run ros::spin()
std::thread spin_thread(spinThread);
ros::Rate rate(1);// Hz 频率
while (ros::ok())
{
// Call ros::spinOnce() to process callbacks
ros::spinOnce();
// Process the queue
//processQueue();
// Sleep for the rest of the loop period
rate.sleep();
}
//ros::spin();
// Join the processing thread before exiting
if (processing_thread.joinable())
{
processing_thread.join();
}
// Join the spin thread before exiting
if (spin_thread.joinable())
{
spin_thread.join();
}
return 0;
}
image_pose_subscriber.py 例子1 简单版本
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import Image
from std_msgs.msg import Float64
from geometry_msgs.msg import Pose
from gaosi_img_pose_flag.msg import ImagePose # 更换为你包的名字
from cv_bridge import CvBridge
import cv2
class ImagePoseSubscriber:
def __init__(self):
# Initialize node
rospy.init_node('image_pose_subscriber', anonymous=True)
# Initialize subscriber
self.sub = rospy.Subscriber('image_pose_topic', ImagePose, self.callback)
# Create a bridge between OpenCV and ROS
self.bridge = CvBridge()
# Create an OpenCV window
cv2.namedWindow("Received Image")
def callback(self, msg):
try:
# Convert ROS image message to OpenCV image
cv_image = self.bridge.imgmsg_to_cv2(msg.image, desired_encoding="bgr8")
cv2.imshow("Received Image", cv_image)
cv2.waitKey(30)
except Exception as e:
rospy.logerr("Failed to convert image: %s", str(e))
rospy.loginfo("Received flag: %.2f", msg.flag.data)
rospy.loginfo("Received pose: Position(%.2f, %.2f, %.2f), Orientation(%.2f, %.2f, %.2f, %.2f)",
msg.pose.position.x, msg.pose.position.y, msg.pose.position.z,
msg.pose.orientation.x, msg.pose.orientation.y, msg.pose.orientation.z, msg.pose.orientation.w)
def run(self):
rospy.spin()
if __name__ == '__main__':
try:
subscriber = ImagePoseSubscriber()
subscriber.run()
except rospy.ROSInterruptException:
pass
image_pose_subscriber.py 例子2 类内部单独线程处理版本
#include <ros/ros.h>
#include <sensor_msgs/Image.h>
#include <std_msgs/Float64.h>
#include <geometry_msgs/Pose.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/opencv.hpp>
#include <gaosi_img_pose_flag/ImagePose.h> // 更换为你包的名字
#include <queue>
#include <mutex>
#include <thread>
class ImagePoseSubscriber
{
public:
ImagePoseSubscriber()
{
// Initialize subscriber
sub_ = nh_.subscribe("image_pose_topic", 10, &ImagePoseSubscriber::callback, this);
// Start processing thread
processing_thread_ = std::thread(&ImagePoseSubscriber::processQueue, this);
}
~ImagePoseSubscriber()
{
// Join the thread before destruction
if (processing_thread_.joinable())
{
processing_thread_.join();
}
}
private:
ros::NodeHandle nh_;
ros::Subscriber sub_;
std::queue<gaosi_img_pose_flag::ImagePose::ConstPtr> data_queue_;
std::mutex queue_mutex_;
std::thread processing_thread_;
bool stop_thread_ = false;
void callback(const gaosi_img_pose_flag::ImagePose::ConstPtr& msg)
{
std::lock_guard<std::mutex> lock(queue_mutex_);
data_queue_.push(msg);
}
void clearQueue()
{
std::lock_guard<std::mutex> lock(queue_mutex_);
std::queue<gaosi_img_pose_flag::ImagePose::ConstPtr> empty;
std::swap(data_queue_, empty);
}
void processQueue()
{
while (!stop_thread_)
{
std::this_thread::sleep_for(std::chrono::milliseconds(100)); // Adjust as needed
std::queue<gaosi_img_pose_flag::ImagePose::ConstPtr> local_queue;
{
std::lock_guard<std::mutex> lock(queue_mutex_);
// 通过交换对象内部的数据成员来完成操作。这个过程不涉及对数据的实际拷贝。
std::swap(local_queue, data_queue_);
}
while (!local_queue.empty())
{
auto msg = local_queue.front();//它返回队列中第一个元素的引用,但不移除它。
local_queue.pop();//移除队列中第一个元素
try
{
// Convert ROS image message to OpenCV image
cv::Mat cv_image = cv_bridge::toCvCopy(msg->image, "bgr8")->image;
cv::imshow("Received Image", cv_image);
cv::waitKey(30);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
}
ROS_INFO("Received flag: %.2f", msg->flag.data);
ROS_INFO("Received pose: Position(%.2f, %.2f, %.2f), Orientation(%.2f, %.2f, %.2f, %.2f)",
msg->pose.position.x, msg->pose.position.y, msg->pose.position.z,
msg->pose.orientation.x, msg->pose.orientation.y, msg->pose.orientation.z, msg->pose.orientation.w);
}
}
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_pose_subscriber");
ImagePoseSubscriber image_pose_subscriber;
ros::spin();
return 0;
}
image_pose_subscriber.py 例子3-1 类外部(主线程)单独线程处理版本
#include <ros/ros.h>
#include <gaosi_img_pose_flag/ImagePose.h> // 更换为你包的名字
#include <queue>
#include <mutex>
#include <thread>
class ImagePoseSubscriber
{
public:
ImagePoseSubscriber()
{
// Initialize subscriber
sub_ = nh_.subscribe("image_pose_topic", 10, &ImagePoseSubscriber::callback, this);
}
// Function to access the queue from outside
std::queue<gaosi_img_pose_flag::ImagePose::ConstPtr> getQueueSnapshot()
{
std::lock_guard<std::mutex> lock(queue_mutex_);
return data_queue_; // Return a copy of the queue
}
// Optionally, you can also provide a function to clear the queue
void clearQueue()
{
std::lock_guard<std::mutex> lock(queue_mutex_);
std::queue<gaosi_img_pose_flag::ImagePose::ConstPtr> empty;
std::swap(data_queue_, empty);
}
private:
ros::NodeHandle nh_;
ros::Subscriber sub_;
std::queue<gaosi_img_pose_flag::ImagePose::ConstPtr> data_queue_;
std::mutex queue_mutex_;
void callback(const gaosi_img_pose_flag::ImagePose::ConstPtr& msg)
{
std::lock_guard<std::mutex> lock(queue_mutex_);
data_queue_.push(msg);
}
};
void processQueue(ImagePoseSubscriber& subscriber)
{
while (ros::ok())
{
std::queue<gaosi_img_pose_flag::ImagePose::ConstPtr> queue_snapshot = subscriber.getQueueSnapshot();
while (!queue_snapshot.empty())
{
auto msg = queue_snapshot.front();
queue_snapshot.pop();
// Process the message (e.g., display image or log pose data)
// This is just an example of processing
ROS_INFO("Processing flag: %.2f", msg->flag.data);
ROS_INFO("Processing pose: Position(%.2f, %.2f, %.2f), Orientation(%.2f, %.2f, %.2f, %.2f)",
msg->pose.position.x, msg->pose.position.y, msg->pose.position.z,
msg->pose.orientation.x, msg->pose.orientation.y, msg->pose.orientation.z, msg->pose.orientation.w);
}
// Optionally, add a sleep to prevent busy waiting
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_pose_processor");
// Initialize ImagePoseSubscriber
ImagePoseSubscriber image_pose_subscriber;
// Create a thread to process the queue
std::thread processing_thread(processQueue, std::ref(image_pose_subscriber));
// Spin ROS
ros::spin();
// Join the processing thread before exiting
if (processing_thread.joinable())
{
processing_thread.join();
}
return 0;
}
image_pose_subscriber.py 例子3-2 非类外部(主线程)单独线程处理版本
#include <ros/ros.h>
#include <gaosi_img_pose_flag/ImagePose.h> // 更换为你包的名字
#include <queue>
#include <mutex>
#include <thread>
#include <iostream>
// Global variables
std::queue<gaosi_img_pose_flag::ImagePose::ConstPtr> data_queue;
std::mutex queue_mutex;
// Callback function to handle incoming messages
void callback(const gaosi_img_pose_flag::ImagePose::ConstPtr& msg)
{
std::lock_guard<std::mutex> lock(queue_mutex);
data_queue.push(msg);
}
// Thread function to process the queue
void processQueue()
{
while (ros::ok())
{
std::queue<gaosi_img_pose_flag::ImagePose::ConstPtr> local_queue;
{
std::lock_guard<std::mutex> lock(queue_mutex);
std::swap(local_queue, data_queue); // Safely access the queue
}
while (!local_queue.empty())
{
auto msg = local_queue.front();
local_queue.pop();
// Process the message
ROS_INFO("Processing flag: %.2f", msg->flag.data);
ROS_INFO("Processing pose: Position(%.2f, %.2f, %.2f), Orientation(%.2f, %.2f, %.2f, %.2f)",
msg->pose.position.x, msg->pose.position.y, msg->pose.position.z,
msg->pose.orientation.x, msg->pose.orientation.y, msg->pose.orientation.z, msg->pose.orientation.w);
}
// Optional: Sleep to avoid busy waiting
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_pose_processor");
ros::NodeHandle nh;
// Initialize the subscriber
ros::Subscriber sub = nh.subscribe("image_pose_topic", 10, callback);
// Create a thread to process the queue
std::thread processing_thread(processQueue);
// Spin ROS
ros::spin();
// Join the processing thread before exiting
if (processing_thread.joinable())
{
processing_thread.join();
}
return 0;
}

image_pose_flag_publisher.cpp
#include <ros/ros.h>
#include <sensor_msgs/Image.h>
#include <std_msgs/Float64.h>
#include <geometry_msgs/Pose.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/opencv.hpp>
#include <gaosi_img_pose_flag/ImagePose.h> // 更换为你包的名字
class ImagePosePublisher
{
public:
ImagePosePublisher()
{
// Initialize publisher
pub_ = nh_.advertise<gaosi_img_pose_flag::ImagePose>("image_pose_topic", 10);
// Load or create a sample image
image_ = cv::Mat::zeros(480, 640, CV_8UC3); // Black image
// Set flag
flag_.data = 1.23; // Example double value
// Set pose
pose_.position.x = 1.0;
pose_.position.y = 2.0;
pose_.position.z = 3.0;
pose_.orientation.x = 0.0;
pose_.orientation.y = 0.0;
pose_.orientation.z = 0.0;
pose_.orientation.w = 1.0;
// Set publish rate
ros::Rate loop_rate(10); // 10 Hz
while (ros::ok())
{
gaosi_img_pose_flag::ImagePose msg;
// Convert OpenCV image to ROS image message
msg.image = *cv_bridge::CvImage(std_msgs::Header(), "bgr8", image_).toImageMsg();
msg.flag = flag_;
msg.pose = pose_;
// Publish message
pub_.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
}
private:
ros::NodeHandle nh_;
ros::Publisher pub_;
cv::Mat image_;
std_msgs::Float64 flag_;
geometry_msgs::Pose pose_;
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_pose_publisher");
ImagePosePublisher image_pose_publisher;
return 0;
}
image_pose_flag_subscriber.cpp
#include <ros/ros.h>
#include <sensor_msgs/Image.h>
#include <std_msgs/Float64.h>
#include <geometry_msgs/Pose.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/opencv.hpp>
#include <gaosi_img_pose_flag/ImagePose.h> // 更换为你包的名字
class ImagePoseSubscriber
{
public:
ImagePoseSubscriber()
{
// Initialize subscriber
sub_ = nh_.subscribe("image_pose_topic", 10, &ImagePoseSubscriber::callback, this);
}
private:
ros::NodeHandle nh_;
ros::Subscriber sub_;
void callback(const gaosi_img_pose_flag::ImagePose::ConstPtr& msg)
{
try
{
// Convert ROS image message to OpenCV image
cv::Mat cv_image = cv_bridge::toCvCopy(msg->image, "bgr8")->image;
cv::imshow("Received Image", cv_image);
cv::waitKey(30);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
}
ROS_INFO("Received flag: %.2f", msg->flag.data);
ROS_INFO("Received pose: Position(%.2f, %.2f, %.2f), Orientation(%.2f, %.2f, %.2f, %.2f)",
msg->pose.position.x, msg->pose.position.y, msg->pose.position.z,
msg->pose.orientation.x, msg->pose.orientation.y, msg->pose.orientation.z, msg->pose.orientation.w);
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_pose_subscriber");
ImagePoseSubscriber image_pose_subscriber;
ros::spin();
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号