

CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(3DTo3D)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_BUILD_TYPE Release)
find_package(Pangolin REQUIRED)# 可视化工具库
include_directories(${Pangolin_INCLUDE_DIRS})
# OpenCV
# find_package(OpenCV REQUIRED)
# include_directories(${OpenCV_INCLUDE_DIRS})
# Sophus
# find_package(Sophus REQUIRED)
# include_directories(${Sophus_INCLUDE_DIRS})
# Eigen
# 不需要寻找 手动指定默认安装位置 只是一堆头文件 无需target_link_libraries
find_package(Eigen3 REQUIRED)
include_directories("/usr/local/include/eigen3")
# 编译节点
add_executable(v1_node main.cpp)
# 链接目标
# target_link_libraries(v1_node ${Pangolin_LIBRARIES} ${OpenCV_LIBS} -lgomp)
target_link_libraries(v1_node ${Pangolin_LIBRARIES} )
main.cpp
#include <iostream>
#include <thread>
#include <queue>
#include <mutex>
#include <unistd.h> // For sleep function
#include <Eigen/Core>
#include <pangolin/pangolin.h>
#include <vector>
using namespace std;
// 用于存储3D点的队列和互斥锁
vector<Eigen::Vector3d> pointQueue;
mutex queueMutex;
using namespace std;
using namespace Eigen;
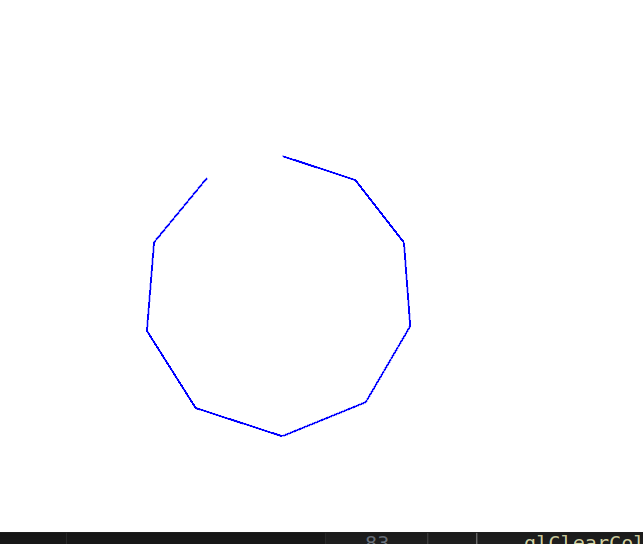
std::vector<Eigen::Vector3d> generateCircle3D(double radius, int numPoints) {
std::vector<Eigen::Vector3d> circlePoints;
for (int i = 0; i < numPoints; ++i) {
double theta = 2.0 * M_PI * i / numPoints;
double x = radius * std::cos(theta);
double y = radius * std::sin(theta);
double z = 0.0; // 在平面内,z 始终为 0
circlePoints.emplace_back(x, y, z);
}
return circlePoints;
}
// 主线程生成3D点的函数
void generatePoints() {
int pointId = 0;
double radius = 10; // 圆的半径
int numPoints = 10; // 生成的点的数量
vector<Vector3d> source_points = generateCircle3D(radius, numPoints);
while (true) {
if (pointId>=source_points.size()){break;}
// 模拟生成一个3D点
Eigen::Vector3d point=source_points[pointId];
// 加入队列
queueMutex.lock();
pointQueue.push_back(point);
queueMutex.unlock();
++pointId;
sleep(1); // 每秒生成一个点
}
}
// 显示线程使用Pangolin显示和处理3D点
void displayPoints() {
// create pangolin window and plot the trajectory
pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (!pangolin::ShouldQuit()) {
// 清空缓冲区
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glLineWidth(2);
// 处理队列中的所有点并绘制
queueMutex.lock();
if(pointQueue.size()>=2){
for (size_t i = 0; i < pointQueue.size() - 1; i++) {
Eigen::Vector3d point1 = pointQueue[i];
Eigen::Vector3d point2 = pointQueue[i+1];
cout<<point1<<" "<< point2 <<endl;
glColor3f(0.0f, 0.0f, 1.0f); // blue for ground truth
glBegin(GL_LINES);
glVertex3d(point1[0], point1[1], point1[2]);
glVertex3d(point2[0], point2[1], point2[2]);
glEnd();
}
}
queueMutex.unlock();
// 完成帧并交换缓冲区
pangolin::FinishFrame();
usleep(1000); // sleep 5 ms
}
// 关闭Pangolin窗口
pangolin::DestroyWindow("3D Points Display");
}
int main() {
// 启动生成和显示线程
thread generateThread(generatePoints);
thread displayThread(displayPoints);
// 等待线程结束
generateThread.join();
displayThread.join();
return 0;
}
#include<iostream>
#include<thread>
#include<queue>
#include<mutex>
#include<unistd.h>// For sleep function
#include<Eigen/Core>
#include<pangolin/pangolin.h>
#include<vector>
using namespace std;
// 用于存储3D点的队列和互斥锁
vector<Eigen::Vector3d> pointQueue;
mutex queueMutex;
using namespace std;
using namespace Eigen;
std::vector<Eigen::Vector3d> generateCircle3D(double radius, int numPoints) {
std::vector<Eigen::Vector3d> circlePoints;
for (int i = 0; i < numPoints; ++i) {
double theta = 2.0 * M_PI * i / numPoints;
double x = radius * std::cos(theta);
double y = radius * std::sin(theta);
double z = 0.0; // 在平面内,z 始终为 0
circlePoints.emplace_back(x, y, z);
}
return circlePoints;
}
// 主线程生成3D点的函数
void generatePoints() {
int pointId = 0;
double radius = 10; // 圆的半径
int numPoints = 10; // 生成的点的数量
vector<Vector3d> source_points = generateCircle3D(radius, numPoints);
while (true) {
if (pointId>=source_points.size()){break;}
// 模拟生成一个3D点
Eigen::Vector3d point=source_points[pointId];
// 加入队列
queueMutex.lock();
pointQueue.push_back(point);
queueMutex.unlock();
++pointId;
sleep(1); // 每秒生成一个点
}
}
// 显示线程使用Pangolin显示和处理3D点
void displayPoints() {
// create pangolin window and plot the trajectory
pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (!pangolin::ShouldQuit()) {
// 清空缓冲区
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glLineWidth(2);
// 处理队列中的所有点并绘制
queueMutex.lock();
if(pointQueue.size()>=2){
for (size_t i = 0; i < pointQueue.size() - 1; i++) {
Eigen::Vector3d point1 = pointQueue[i];
Eigen::Vector3d point2 = pointQueue[i+1];
cout<<point1<<" "<< point2 <<endl;
glColor3f(0.0f, 0.0f, 1.0f); // blue for ground truth
glBegin(GL_LINES);
glVertex3d(point1[0], point1[1], point1[2]);
glVertex3d(point2[0], point2[1], point2[2]);
glEnd();
}
}
queueMutex.unlock();
// 完成帧并交换缓冲区
pangolin::FinishFrame();
usleep(1000); // sleep 5 ms
}
// 关闭Pangolin窗口
pangolin::DestroyWindow("3D Points Display");
}
int main() {
// 启动生成和显示线程
thread generateThread(generatePoints);
thread displayThread(displayPoints);
// 等待线程结束
generateThread.join();
displayThread.join();
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号