




CMakeLists.txt
project(test)
find_package(Pangolin REQUIRED)
include_directories(${Pangolin_INCLUDE_DIRS})
find_package(fmt REQUIRED)
set(FMT_LIBRARIES fmt::fmt)
#set(v1_node_file main.cpp)
add_executable(v1_node main.cpp)
target_link_libraries(v1_node ${Pangolin_LIBRARIES} ${FMT_LIBRARIES})
main.cpp
#ifndef MAIN_CPP
#define MAIN_CPP
#include "API_draw.h"
string groundtruth_file = "./data/groundtruth.txt";
string estimated_file = "./data/estimated.txt";
int main(int argc, char **argv) {
TrajectoryType groundtruth = ReadTrajectory(groundtruth_file);
TrajectoryType estimated = ReadTrajectory(estimated_file);
assert(!groundtruth.empty() && !estimated.empty());
assert(groundtruth.size() == estimated.size());
// compute rmse
double rmse = 0;
for (size_t i = 0; i < estimated.size(); i++) {
Sophus::SE3d p1 = estimated[i], p2 = groundtruth[i];
double error = (p2.inverse() * p1).log().norm();
rmse += error * error;
}
rmse = rmse / double(estimated.size());
rmse = sqrt(rmse);
cout << "RMSE = " << rmse << endl;
DrawTrajectory(groundtruth, estimated);
return 0;
}
#endif
API_draw.h
#ifndef DRAW_CPP
#define DRAW_CPP
#include <iostream>
#include <fstream>
#include <unistd.h>
#include <pangolin/pangolin.h>
#include <sophus/se3.hpp>
using namespace Sophus;
using namespace std;
typedef vector<Sophus::SE3d, Eigen::aligned_allocator<Sophus::SE3d>> TrajectoryType;
void DrawTrajectory(const TrajectoryType >, const TrajectoryType &esti);
TrajectoryType ReadTrajectory(const string &path);
TrajectoryType ReadTrajectory(const string &path) {
ifstream fin(path);
TrajectoryType trajectory;
if (!fin) {
cerr << "trajectory " << path << " not found." << endl;
return trajectory;
}
while (!fin.eof()) {
double time, tx, ty, tz, qx, qy, qz, qw;
fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw;
Sophus::SE3d p1(Eigen::Quaterniond(qw, qx, qy, qz), Eigen::Vector3d(tx, ty, tz));
trajectory.push_back(p1);
}
return trajectory;
}
void DrawTrajectory(const TrajectoryType >, const TrajectoryType &esti) {
// create pangolin window and plot the trajectory
pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glLineWidth(2);
for (size_t i = 0; i < gt.size() - 1; i++) {
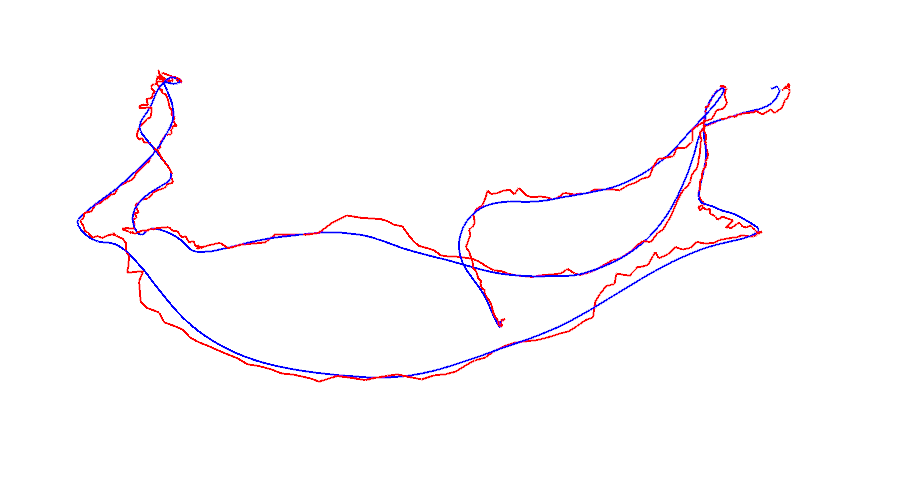
glColor3f(0.0f, 0.0f, 1.0f); // blue for ground truth
glBegin(GL_LINES);
auto p1 = gt[i], p2 = gt[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
for (size_t i = 0; i < esti.size() - 1; i++) {
glColor3f(1.0f, 0.0f, 0.0f); // red for estimated
glBegin(GL_LINES);
auto p1 = esti[i], p2 = esti[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
}
#endif
#ifndef DRAW_CPP
#defineDRAW_CPP
#include<iostream>
#include<fstream>
#include<unistd.h>
#include<pangolin/pangolin.h>
#include<sophus/se3.hpp>
using namespace Sophus;
using namespace std;
typedef vector<Sophus::SE3d, Eigen::aligned_allocator<Sophus::SE3d>> TrajectoryType;
void DrawTrajectory(const TrajectoryType >, const TrajectoryType &esti);
TrajectoryType ReadTrajectory(const string &path);
TrajectoryType ReadTrajectory(const string &path) {
ifstream fin(path);
TrajectoryType trajectory;
if (!fin) {
cerr << "trajectory " << path << " not found." << endl;
return trajectory;
}
while (!fin.eof()) {
double time, tx, ty, tz, qx, qy, qz, qw;
fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw;
Sophus::SE3d p1(Eigen::Quaterniond(qw, qx, qy, qz), Eigen::Vector3d(tx, ty, tz));
trajectory.push_back(p1);
}
return trajectory;
}
void DrawTrajectory(const TrajectoryType >, const TrajectoryType &esti) {
// create pangolin window and plot the trajectory
pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glLineWidth(2);
for (size_t i = 0; i < gt.size() - 1; i++) {
glColor3f(0.0f, 0.0f, 1.0f); // blue for ground truth
glBegin(GL_LINES);
auto p1 = gt[i], p2 = gt[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
for (size_t i = 0; i < esti.size() - 1; i++) {
glColor3f(1.0f, 0.0f, 0.0f); // red for estimated
glBegin(GL_LINES);
auto p1 = esti[i], p2 = esti[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
}
#endif

 浙公网安备 33010602011771号
浙公网安备 33010602011771号