
维特imu
https://detail.tmall.com/item.htm?abbucket=11&id=598197117280&ns=1&skuId=4537254155950&spm=a21n57.1.item.8.5099523ce0QsSo

https://wit-motion.yuque.com/wumwnr/ltst03/out9g0

485直接当串口
默认9600波特率
#include "REG.h"
#include "wit_c_sdk.h"
/*
Test on MEGA 2560. use HW-97 module connect WT901C485 sensor
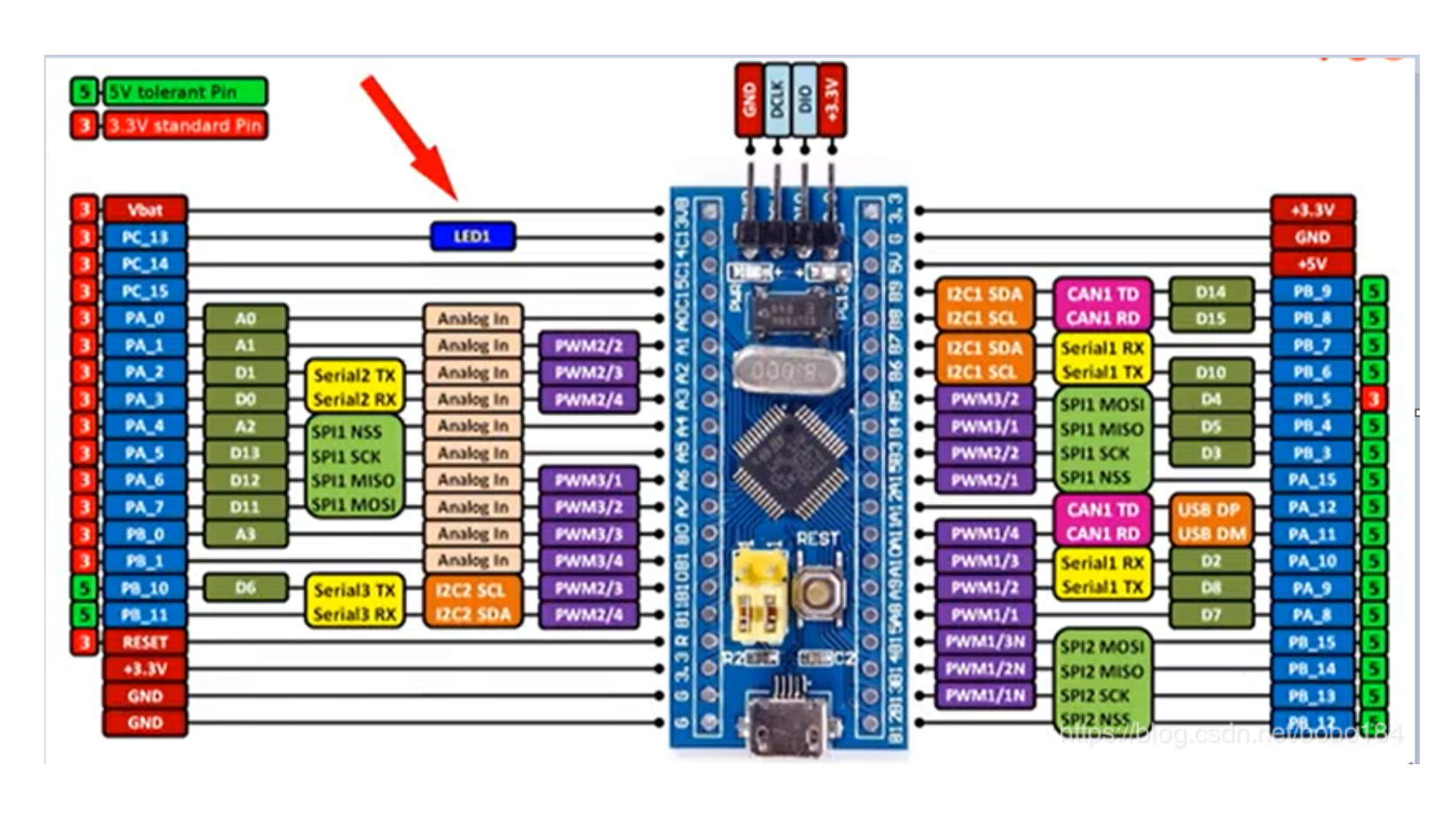
wiring:
5V/3.3V <---------------------------> VCC
TX1 <-----> -stm32 serial2 - PA3
RX1 <-----> -STM32 serial2 - PA2
GND <-----> GND
*/
#define ACC_UPDATE 0x01
#define GYRO_UPDATE 0x02
#define ANGLE_UPDATE 0x04
#define MAG_UPDATE 0x08
#define READ_UPDATE 0x80
static volatile char s_cDataUpdate = 0, s_cCmd = 0xff;
static void CmdProcess(void);
static void RS485_IO_Init(void);
static void AutoScanSensor(void);
static void SensorUartSend(uint8_t *p_data, uint32_t uiSize);
static void CopeSensorData(uint32_t uiReg, uint32_t uiRegNum);
static void Delayms(uint16_t ucMs);
const uint32_t c_uiBaud[8] = { 9600, 4800, 9600, 19200, 38400, 57600, 115200, 230400};
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
RS485_IO_Init();
WitInit(WIT_PROTOCOL_MODBUS, 0x50);
WitSerialWriteRegister(SensorUartSend);
WitRegisterCallBack(CopeSensorData);
WitDelayMsRegister(Delayms);
Serial.print("\r\n********************** wit-motion modbus example ************************\r\n");
AutoScanSensor();
}
int i;
float fAcc[3], fGyro[3], fAngle[3];
void loop() {
WitReadReg(AX, 12);
delay(50);
while (Serial2.available())
{
WitSerialDataIn(Serial2.read());
}
while (Serial.available())
{
CopeCmdData(Serial.read());
}
CmdProcess();
if(s_cDataUpdate)
{
for(i = 0; i < 3; i++)
{
fAcc[i] = sReg[AX+i] / 32768.0f * 16.0f;
fGyro[i] = sReg[GX+i] / 32768.0f * 2000.0f;
fAngle[i] = sReg[Roll+i] / 32768.0f * 180.0f;
}
if(s_cDataUpdate & ACC_UPDATE)
{
Serial.print("acc:");
Serial.print(fAcc[0], 3);
Serial.print(" ");
Serial.print(fAcc[1], 3);
Serial.print(" ");
Serial.print(fAcc[2], 3);
Serial.print("\r\n");
s_cDataUpdate &= ~ACC_UPDATE;
}
if(s_cDataUpdate & GYRO_UPDATE)
{
Serial.print("gyro:");
Serial.print(fGyro[0], 1);
Serial.print(" ");
Serial.print(fGyro[1], 1);
Serial.print(" ");
Serial.print(fGyro[2], 1);
Serial.print("\r\n");
s_cDataUpdate &= ~GYRO_UPDATE;
}
if(s_cDataUpdate & ANGLE_UPDATE)
{
Serial.print("angle:");
Serial.print(fAngle[0], 3);
Serial.print(" ");
Serial.print(fAngle[1], 3);
Serial.print(" ");
Serial.print(fAngle[2], 3);
Serial.print("\r\n");
s_cDataUpdate &= ~ANGLE_UPDATE;
}
if(s_cDataUpdate & MAG_UPDATE)
{
Serial.print("mag:");
Serial.print(sReg[HX]);
Serial.print(" ");
Serial.print(sReg[HY]);
Serial.print(" ");
Serial.print(sReg[HZ]);
Serial.print("\r\n");
s_cDataUpdate &= ~MAG_UPDATE;
}
s_cDataUpdate = 0;
}
}
// 主函数结束
void CopeCmdData(unsigned char ucData)
{
static unsigned char s_ucData[50], s_ucRxCnt = 0;
s_ucData[s_ucRxCnt++] = ucData;
if(s_ucRxCnt<3)return; //Less than three data returned
if(s_ucRxCnt >= 50) s_ucRxCnt = 0;
if(s_ucRxCnt >= 3)
{
if((s_ucData[1] == '\r') && (s_ucData[2] == '\n'))
{
s_cCmd = s_ucData[0];
memset(s_ucData,0,50);
s_ucRxCnt = 0;
}
else
{
s_ucData[0] = s_ucData[1];
s_ucData[1] = s_ucData[2];
s_ucRxCnt = 2;
}
}
}
static void ShowHelp(void)
{
Serial.print("\r\n************************ WIT_SDK_DEMO ************************");
Serial.print("\r\n************************ HELP ************************\r\n");
Serial.print("UART SEND:a\\r\\n Acceleration calibration.\r\n");
Serial.print("UART SEND:m\\r\\n Magnetic field calibration,After calibration send: e\\r\\n to indicate the end\r\n");
Serial.print("UART SEND:U\\r\\n Bandwidth increase.\r\n");
Serial.print("UART SEND:u\\r\\n Bandwidth reduction.\r\n");
Serial.print("UART SEND:B\\r\\n Baud rate increased to 115200.\r\n");
Serial.print("UART SEND:b\\r\\n Baud rate reduction to 9600.\r\n");
Serial.print("UART SEND:h\\r\\n help.\r\n");
Serial.print("******************************************************************************\r\n");
}
static void CmdProcess(void)
{
switch(s_cCmd)
{
case 'a': if(WitStartAccCali() != WIT_HAL_OK) Serial.print("\r\nSet AccCali Error\r\n");
break;
case 'm': if(WitStartMagCali() != WIT_HAL_OK) Serial.print("\r\nSet MagCali Error\r\n");
break;
case 'e': if(WitStopMagCali() != WIT_HAL_OK) Serial.print("\r\nSet MagCali Error\r\n");
break;
case 'u': if(WitSetBandwidth(BANDWIDTH_5HZ) != WIT_HAL_OK) Serial.print("\r\nSet Bandwidth Error\r\n");
break;
case 'U': if(WitSetBandwidth(BANDWIDTH_256HZ) != WIT_HAL_OK) Serial.print("\r\nSet Bandwidth Error\r\n");
break;
case 'B': if(WitSetUartBaud(WIT_BAUD_115200) != WIT_HAL_OK) Serial.print("\r\nSet Baud Error\r\n");
else
{
Serial2.begin(c_uiBaud[WIT_BAUD_115200]);
Serial.print(" 115200 Baud rate modified successfully\r\n");
}
break;
case 'b': if(WitSetUartBaud(WIT_BAUD_9600) != WIT_HAL_OK) Serial.print("\r\nSet Baud Error\r\n");
else
{
Serial2.begin(c_uiBaud[WIT_BAUD_9600]);
Serial.print(" 9600 Baud rate modified successfully\r\n");
}
break;
case 'h': ShowHelp();
break;
default :return;
}
s_cCmd = 0xff;
}
static void RS485_IO_Init(void)
{
pinMode(21, OUTPUT);
}
static void SensorUartSend(uint8_t *p_data, uint32_t uiSize)
{
digitalWrite(21, HIGH);
Serial2.write(p_data, uiSize);
Serial2.flush();
digitalWrite(21, LOW);
}
static void Delayms(uint16_t ucMs)
{
delay(ucMs);
}
static void CopeSensorData(uint32_t uiReg, uint32_t uiRegNum)
{
int i;
for(i = 0; i < uiRegNum; i++)
{
switch(uiReg)
{
case AZ:
s_cDataUpdate |= ACC_UPDATE;
break;
case GZ:
s_cDataUpdate |= GYRO_UPDATE;
break;
case HZ:
s_cDataUpdate |= MAG_UPDATE;
break;
case Yaw:
s_cDataUpdate |= ANGLE_UPDATE;
break;
default:
s_cDataUpdate |= READ_UPDATE;
break;
}
uiReg++;
}
}
static void AutoScanSensor(void)
{
int i, iRetry;
for(i = 0; i < sizeof(c_uiBaud)/sizeof(c_uiBaud[0]); i++)
{
Serial2.begin(c_uiBaud[i]);
Serial2.flush();
iRetry = 2;
s_cDataUpdate = 0;
do
{
WitReadReg(AX, 3);
delay(200);
while (Serial2.available())
{
WitSerialDataIn(Serial2.read());
}
if(s_cDataUpdate != 0)
{
Serial.print(c_uiBaud[i]);
Serial.print(" baud find sensor\r\n\r\n");
ShowHelp();
return ;
}
iRetry--;
}while(iRetry);
}
Serial.print("can not find sensor\r\n");
Serial.print("please check your connection\r\n");
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号