https://blog.csdn.net/qq_39266065/article/details/115348824
误差的传递由两部分组成:
1.当前时刻的误差传递给下一时刻,
2.当前时刻测量噪声传递给下一时刻。
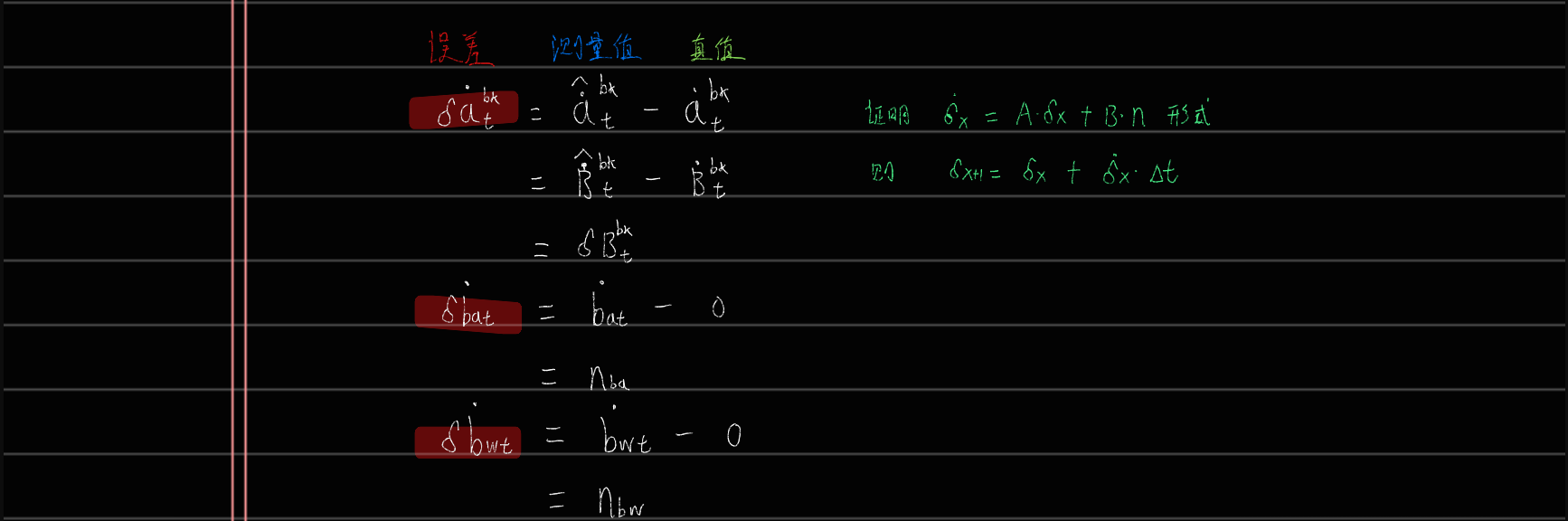
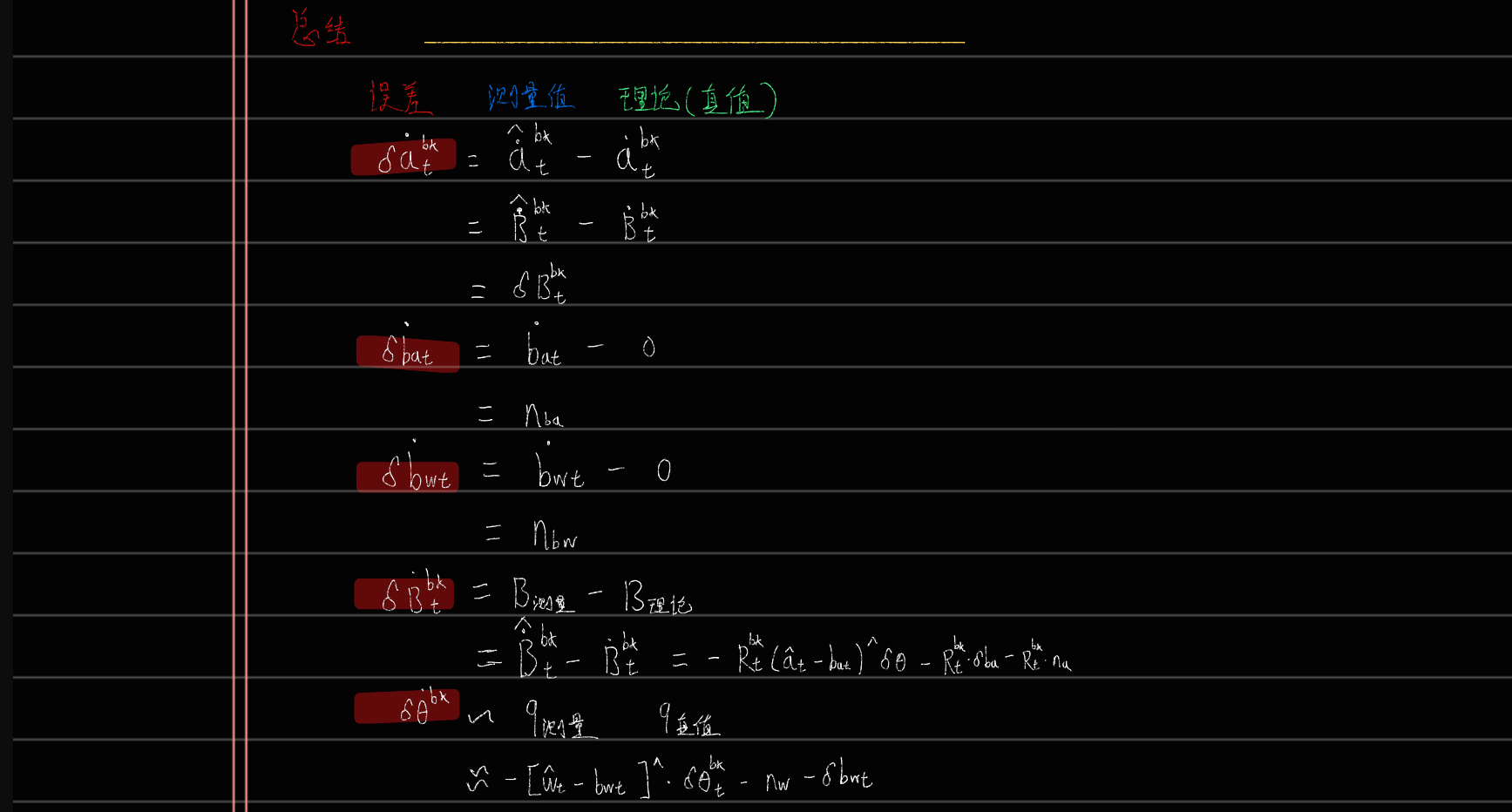
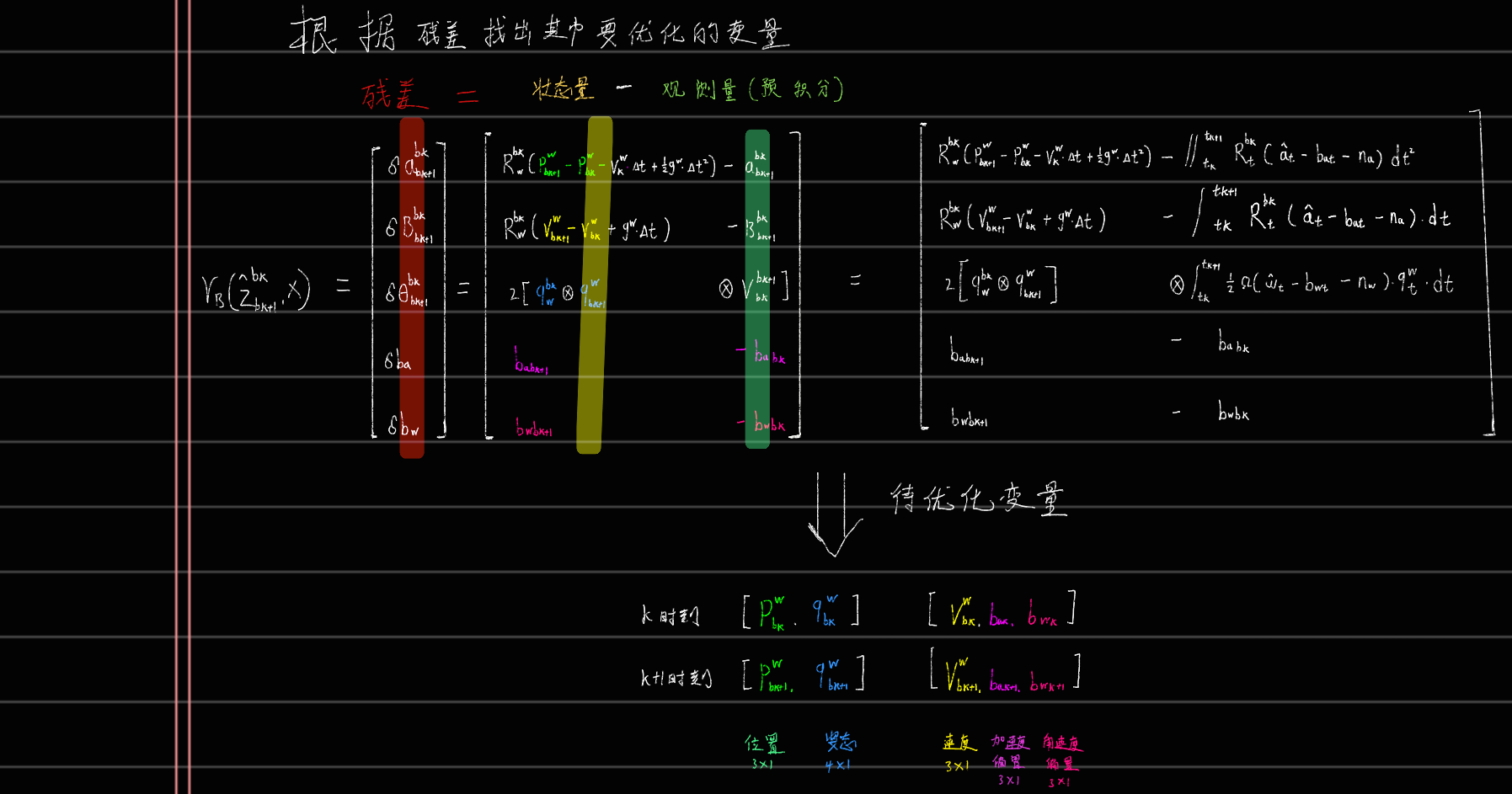
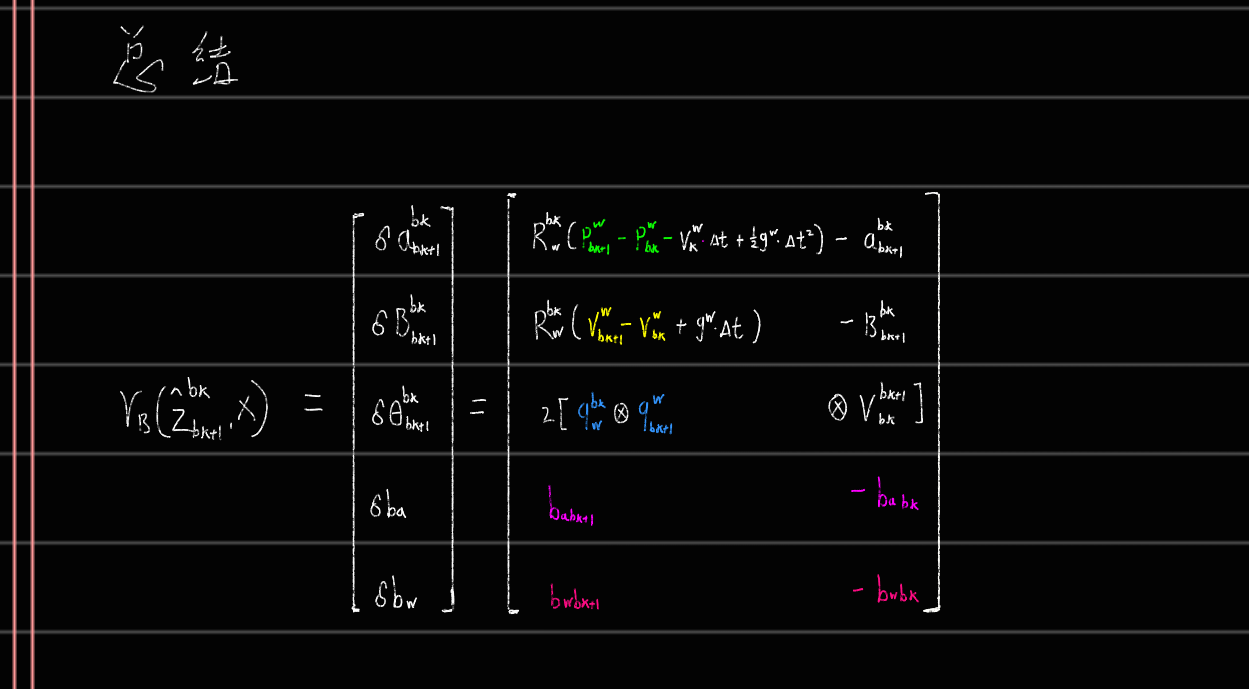
状态量误差
测量噪声
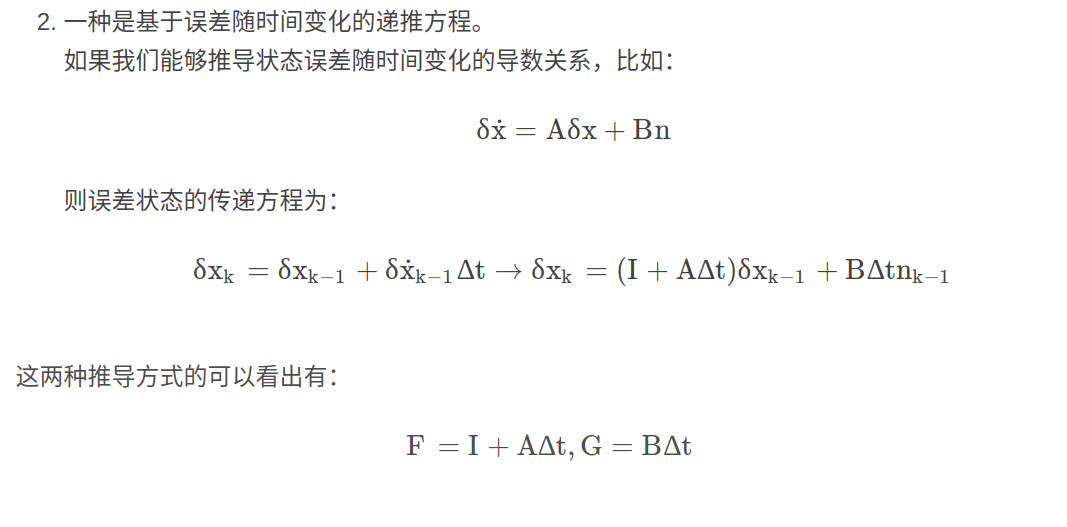
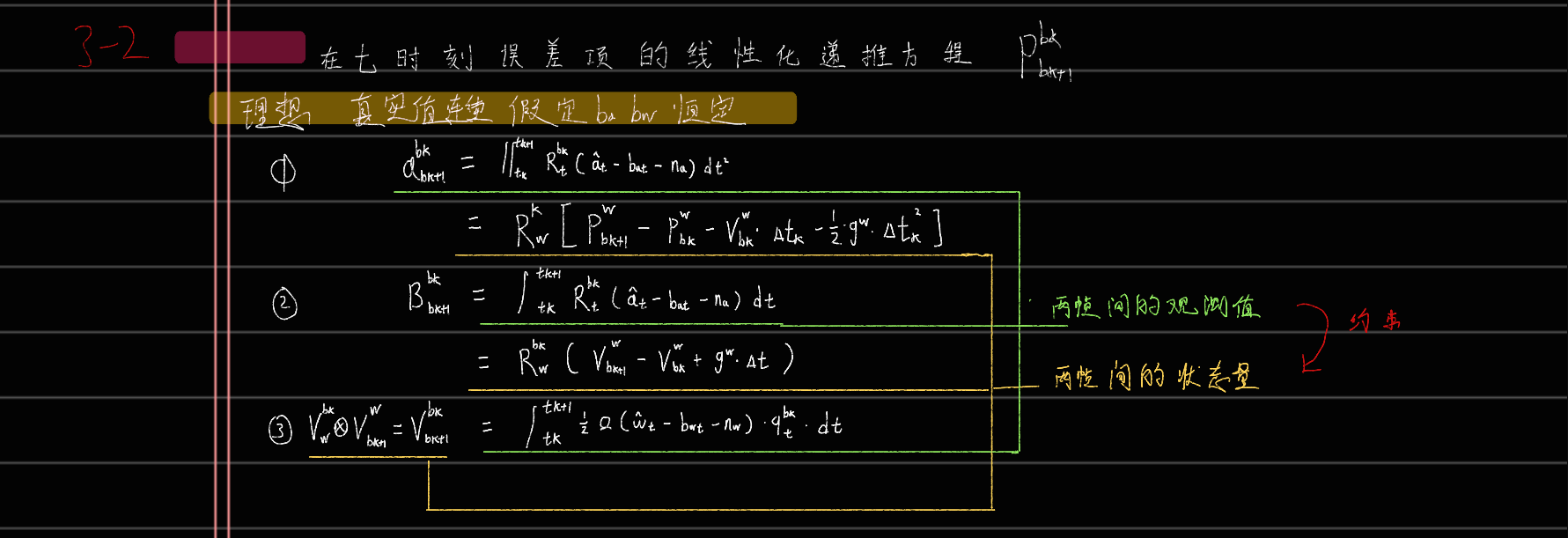
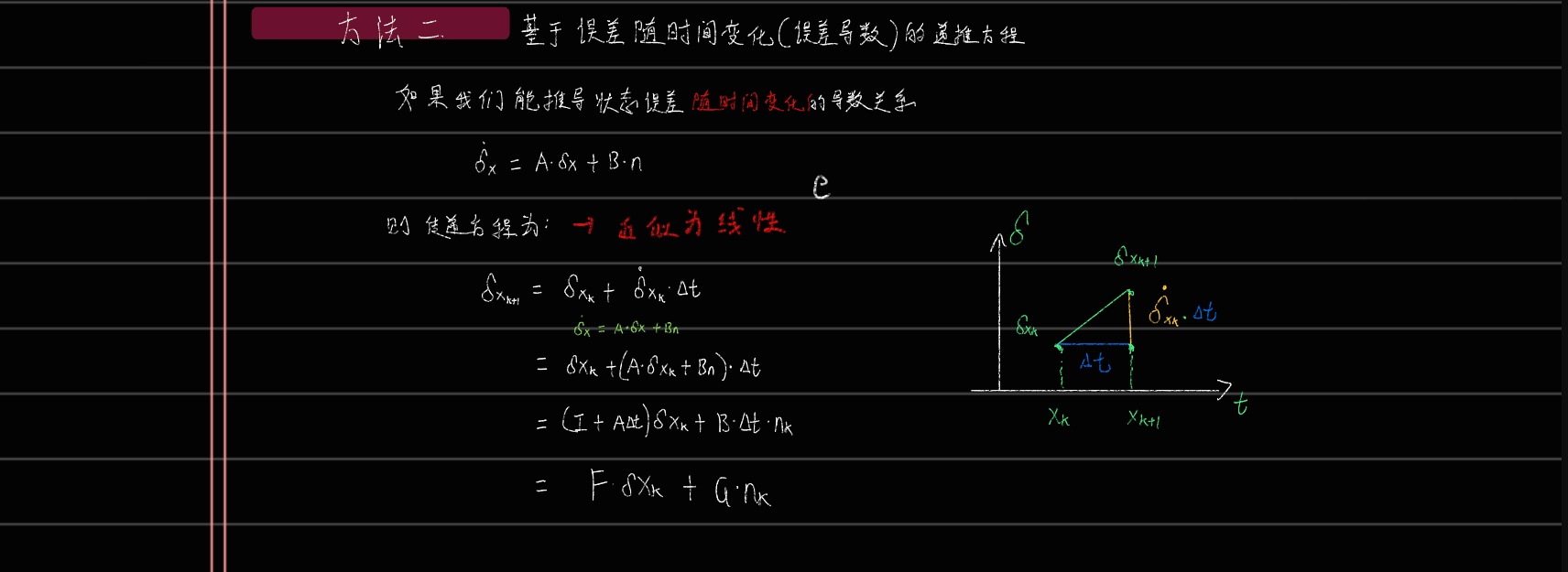
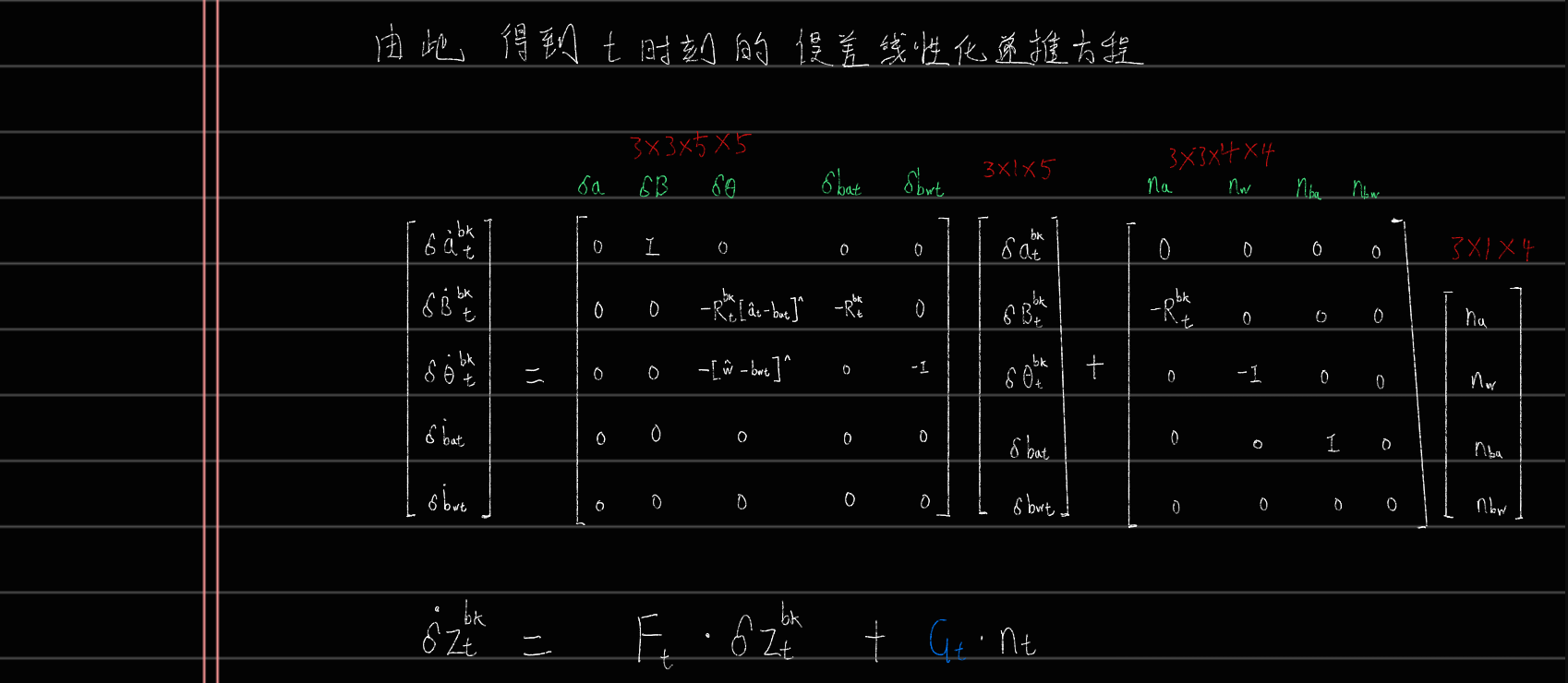
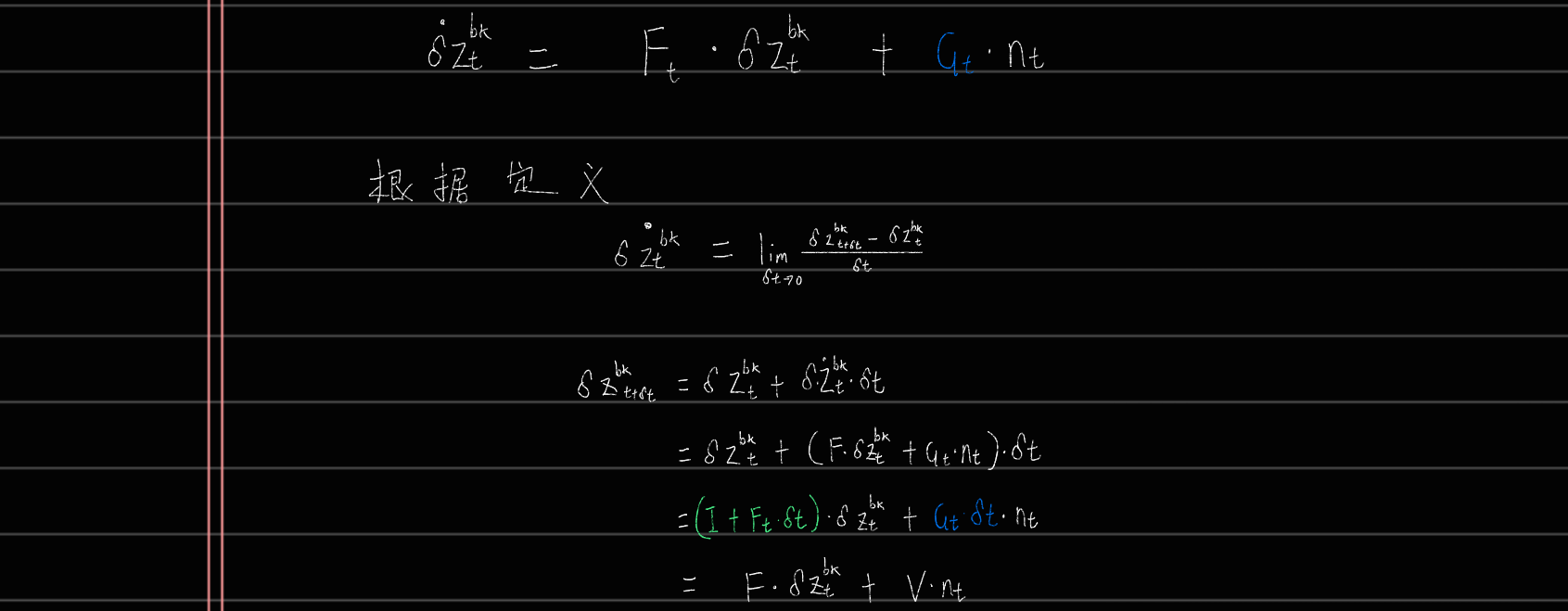
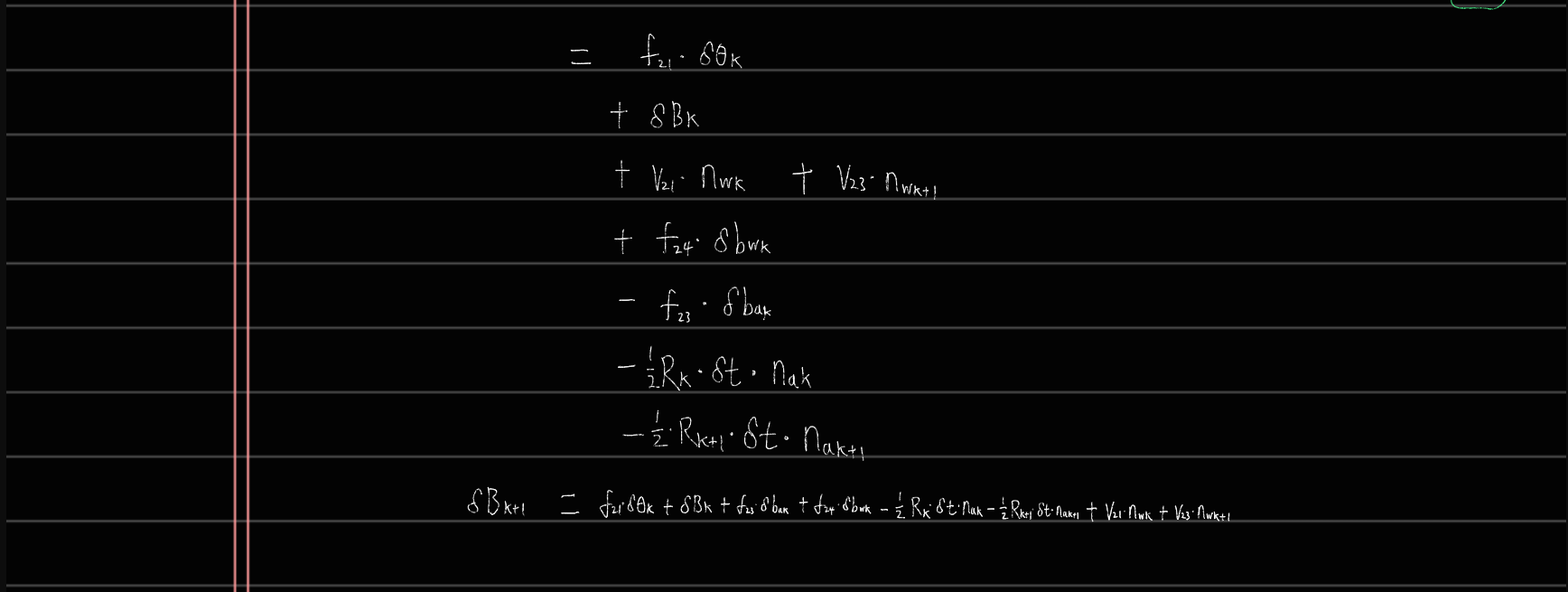
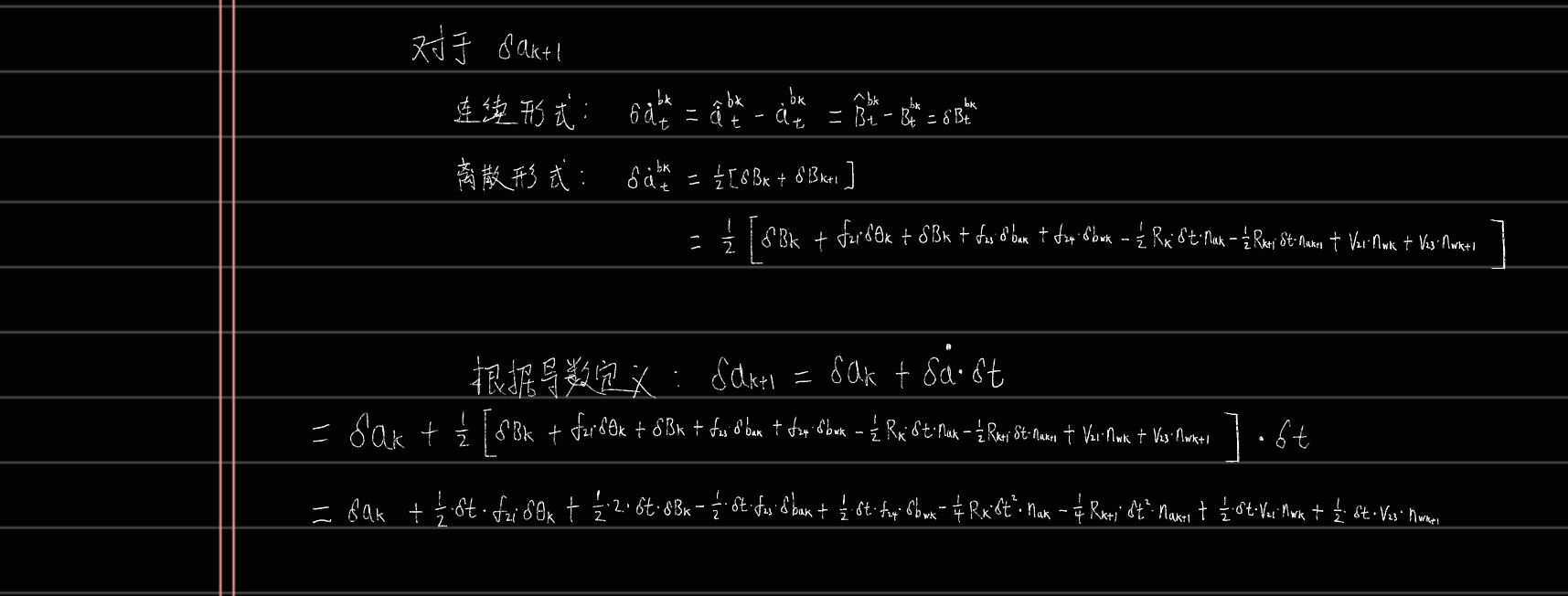
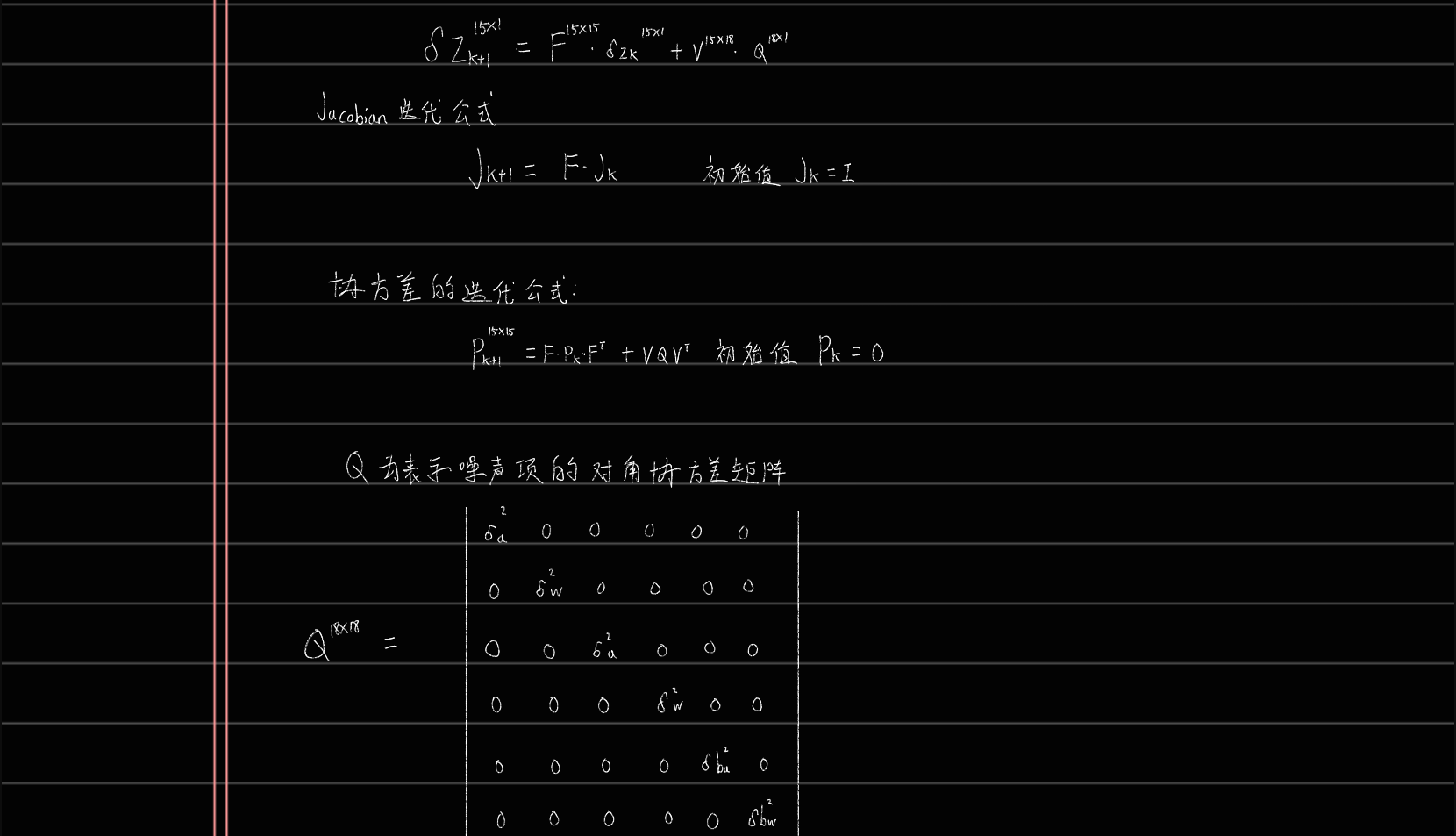
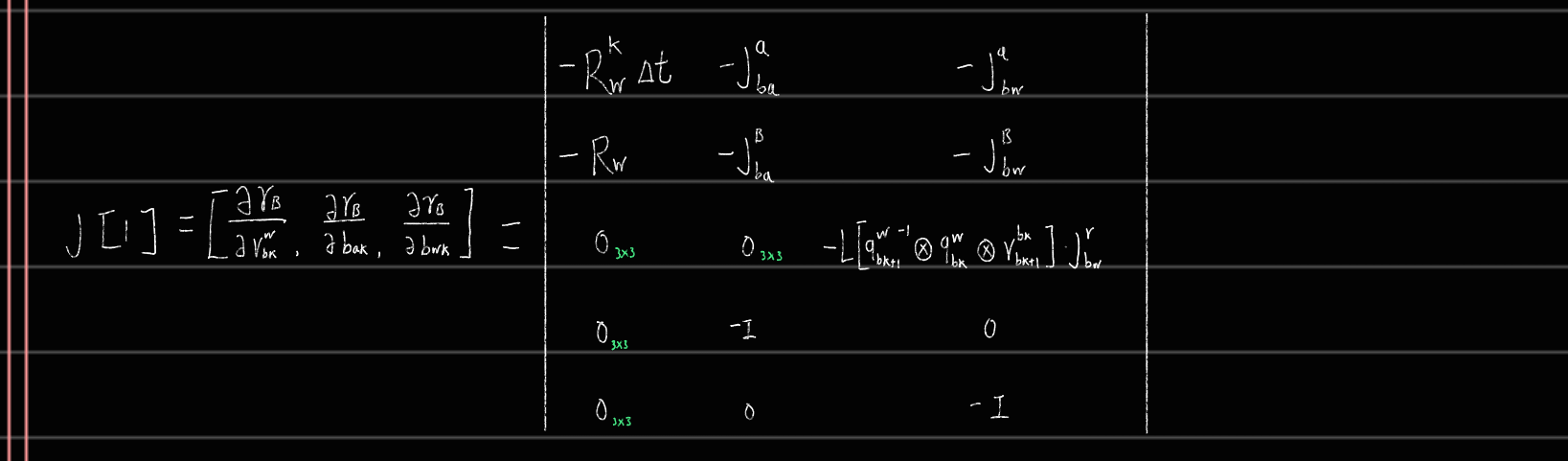
假设已知了相邻时刻误差的线性传递方程:
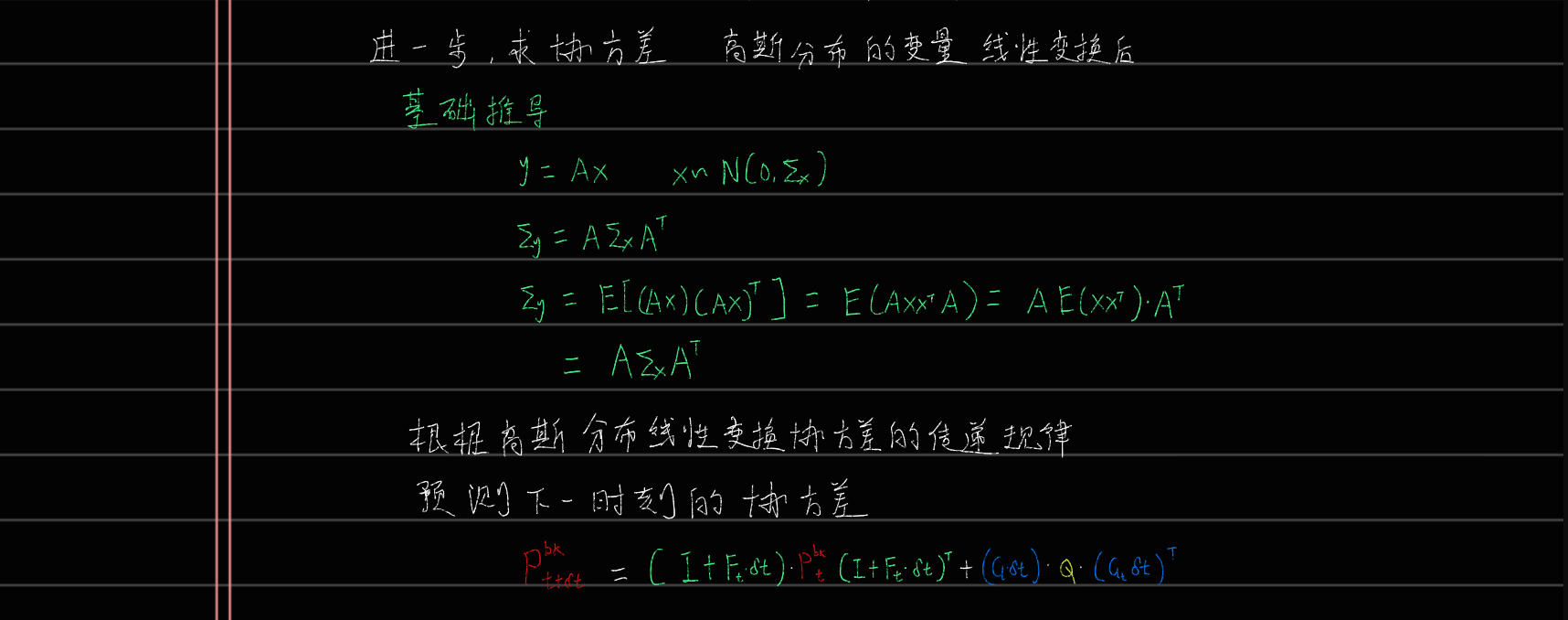
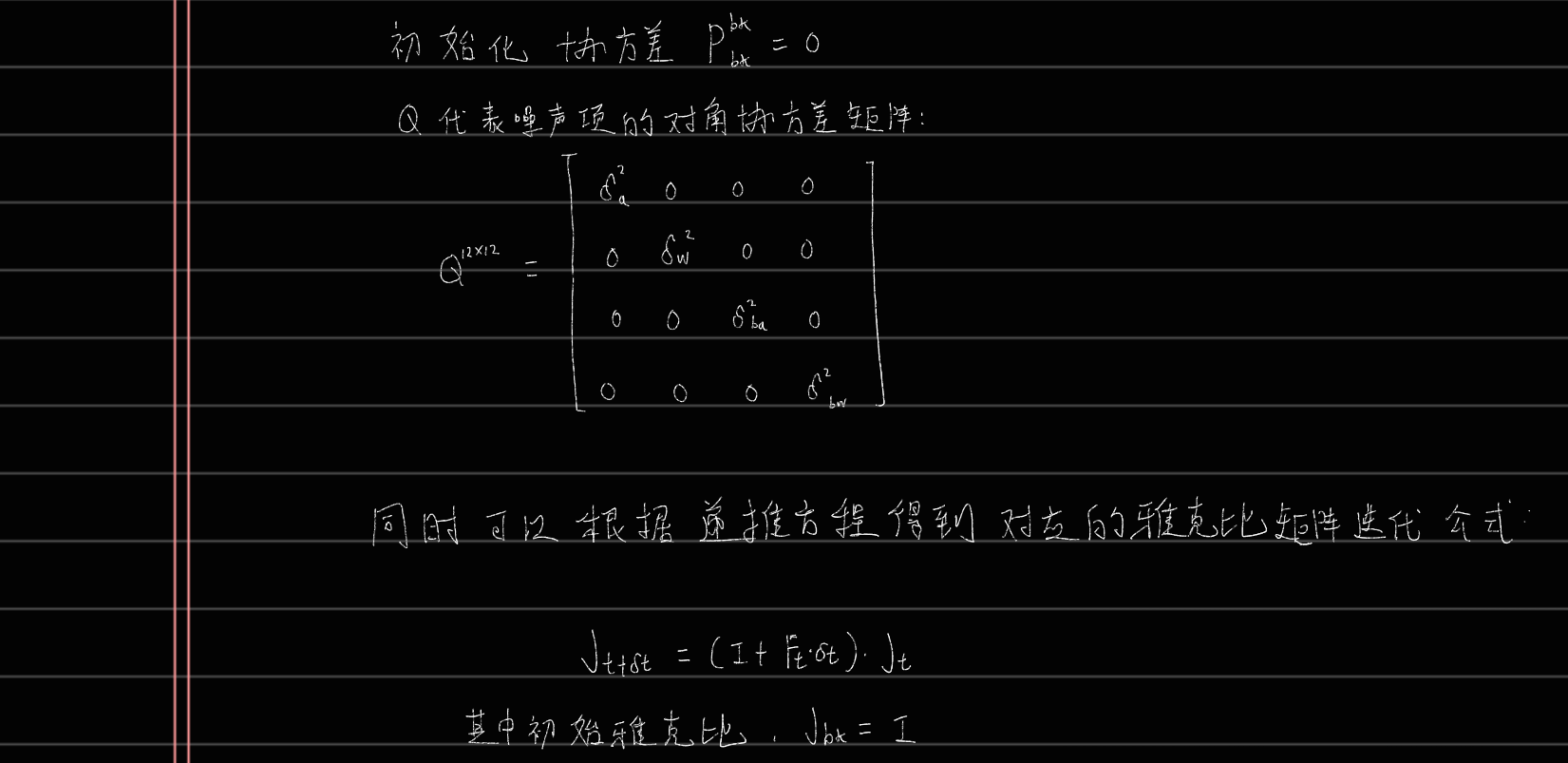
协方差矩阵可以通过递推
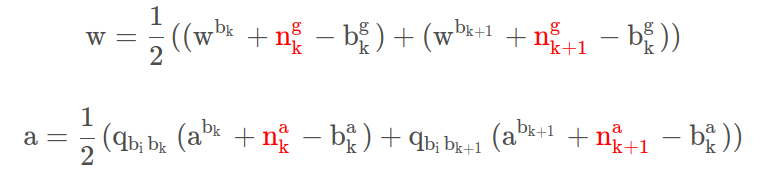
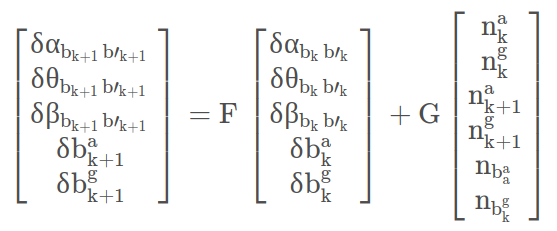
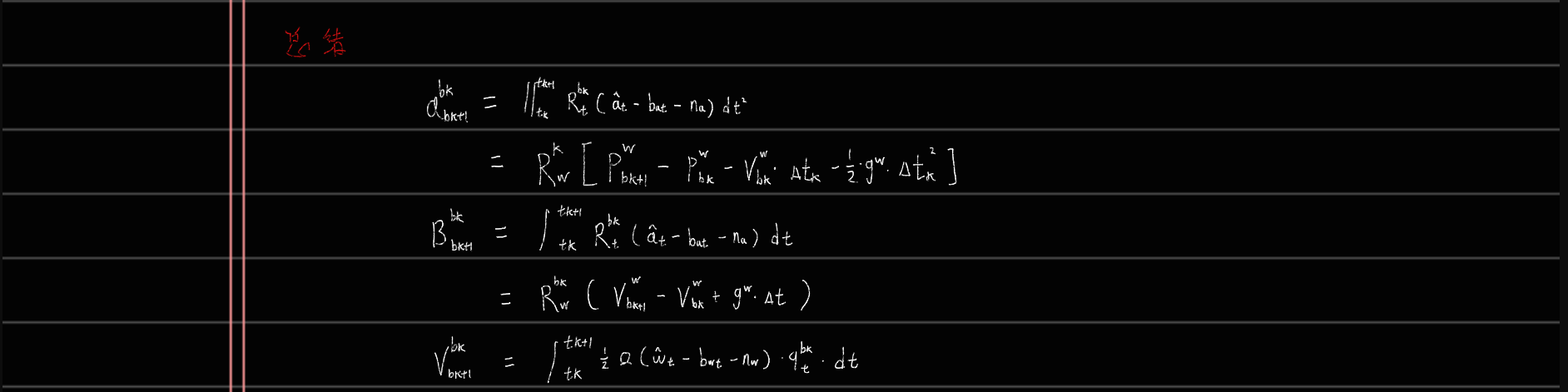
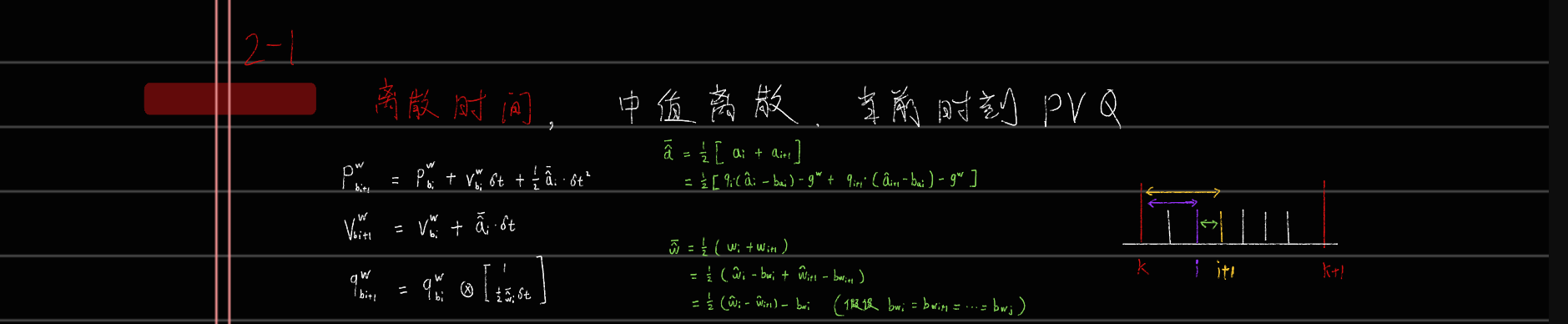
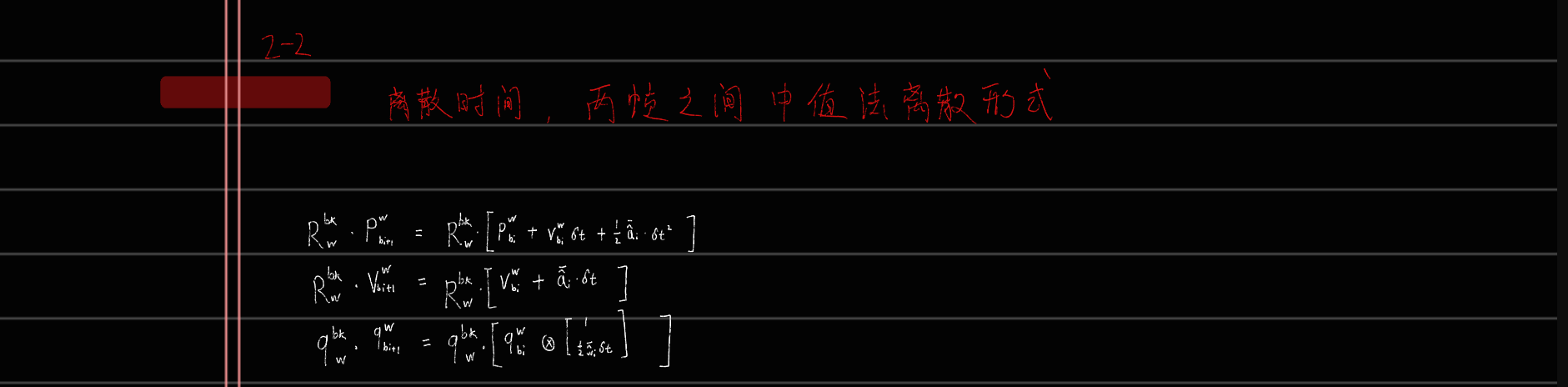
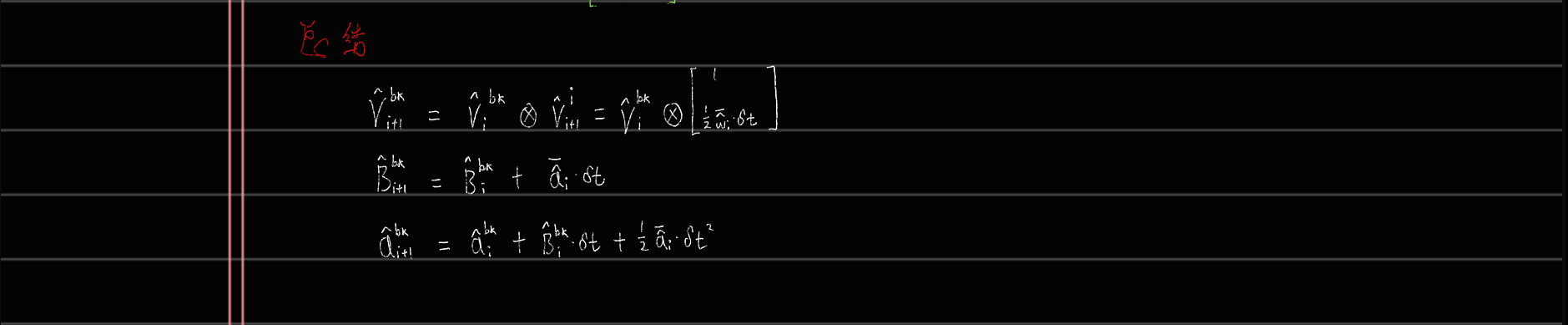
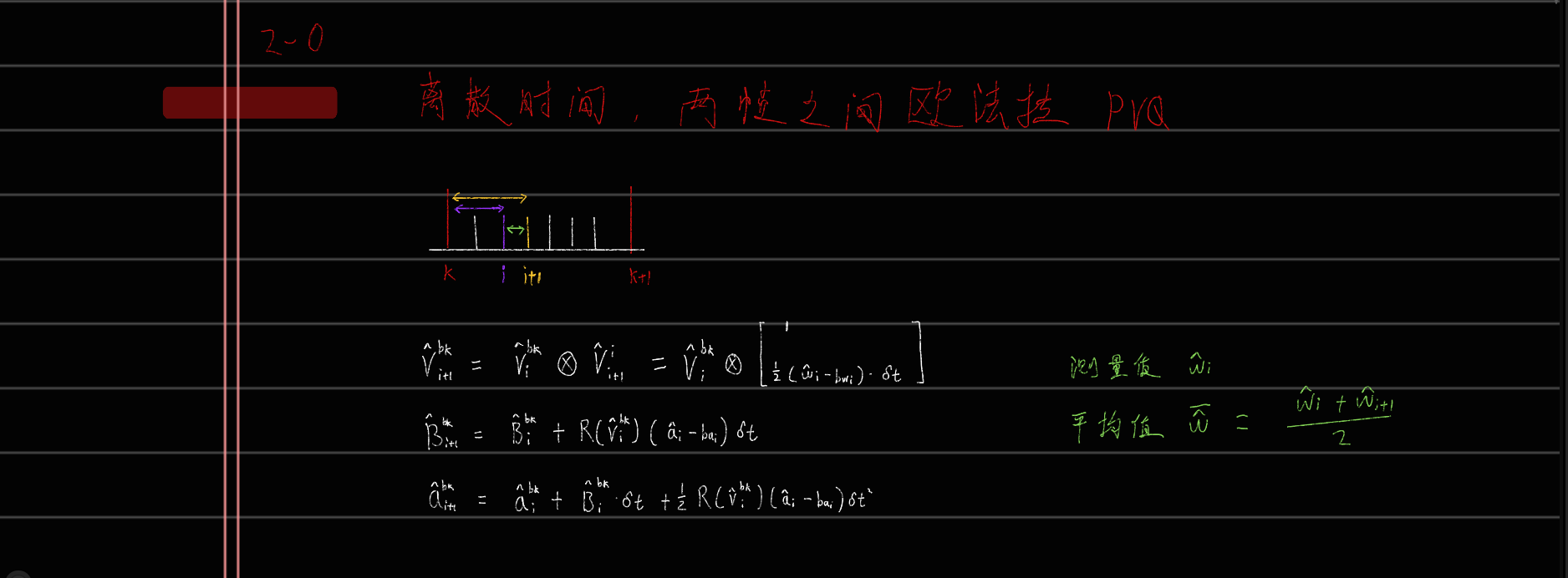
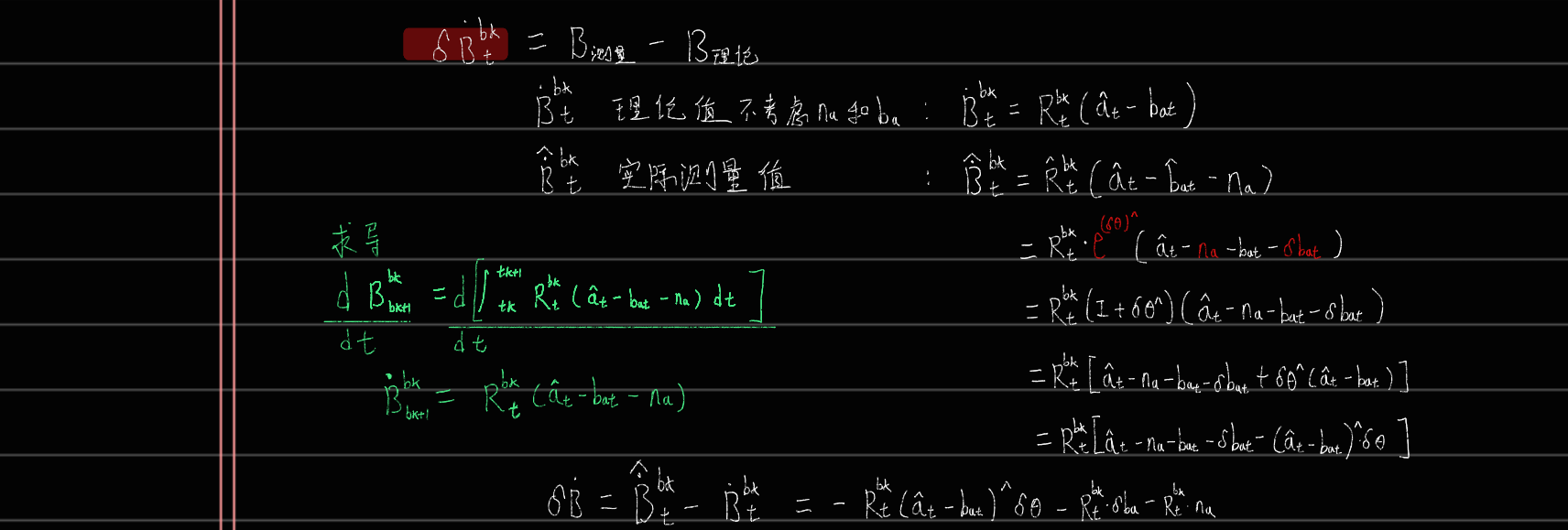
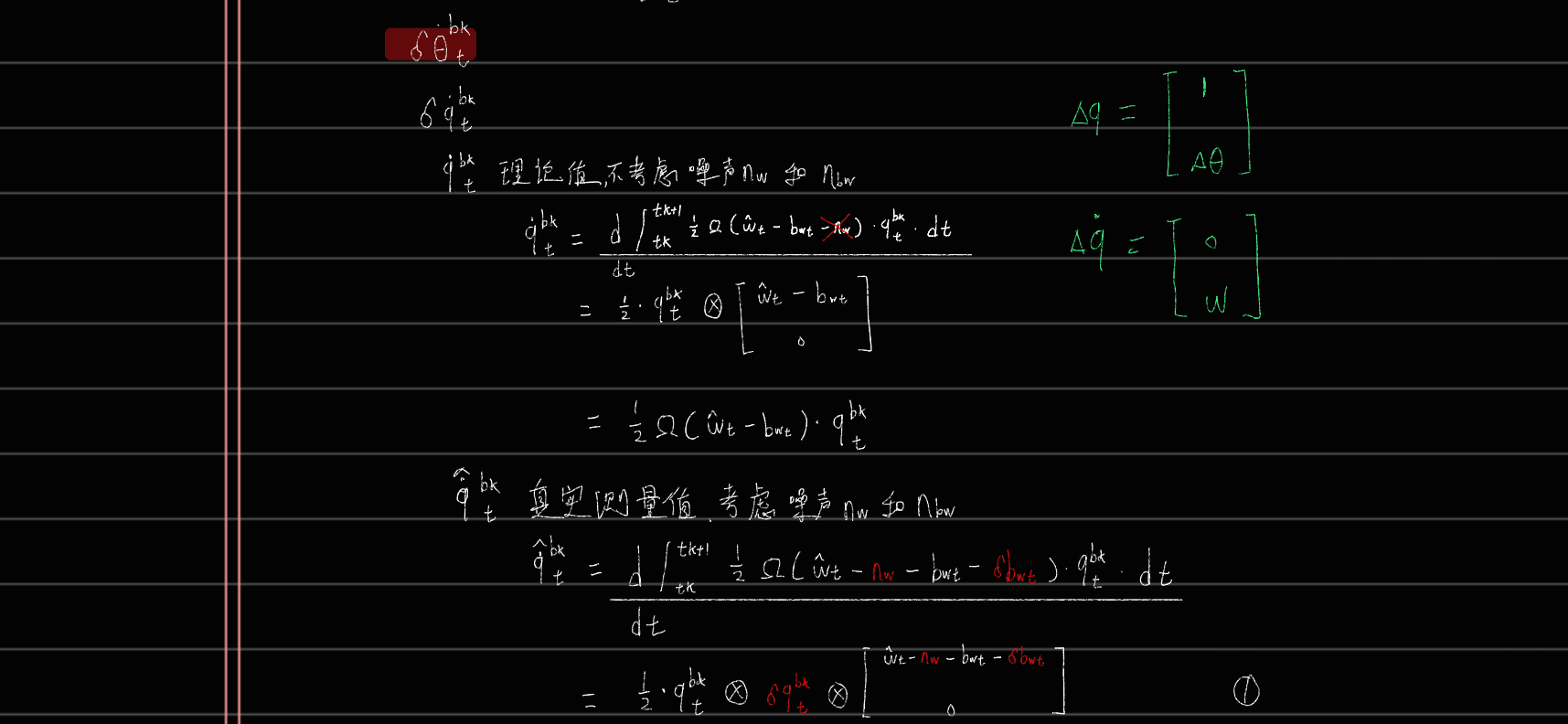
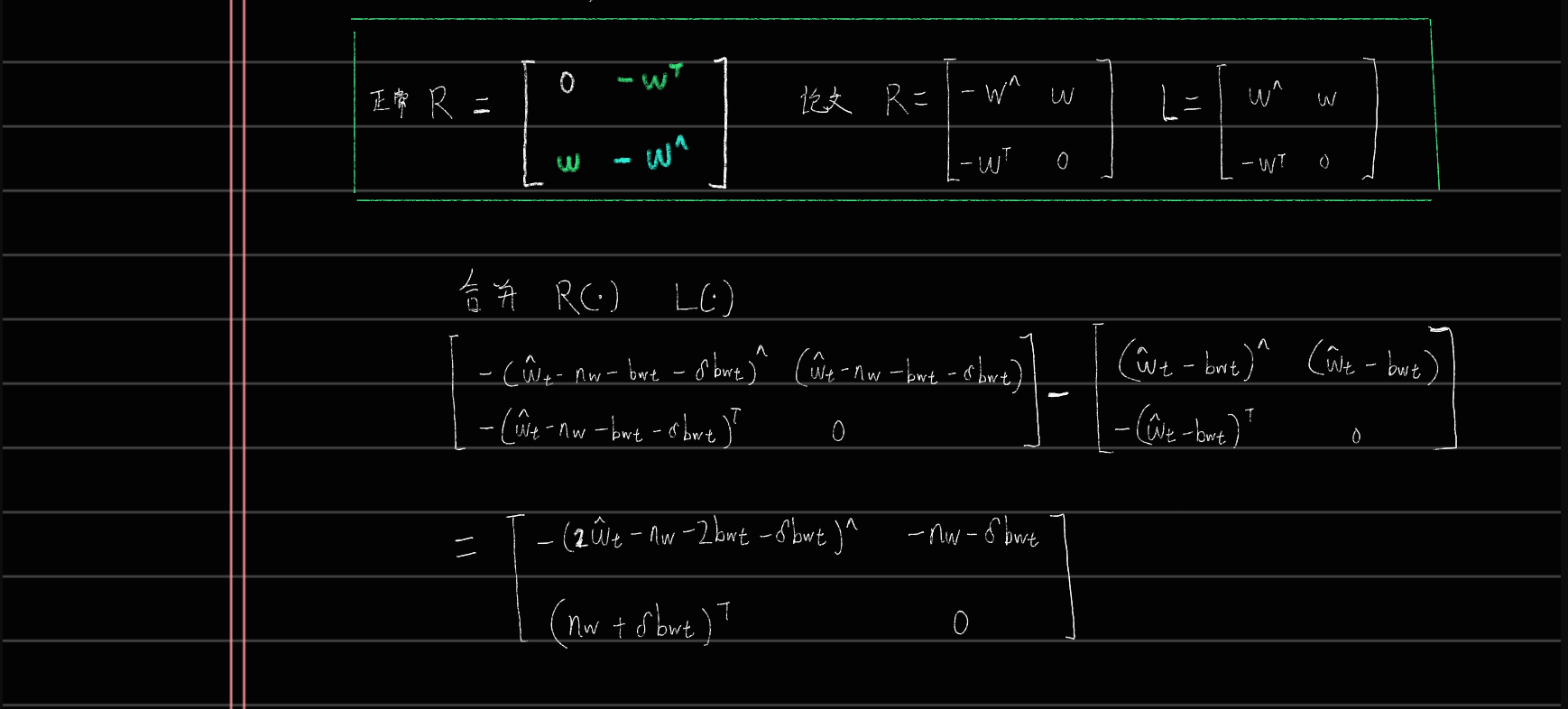
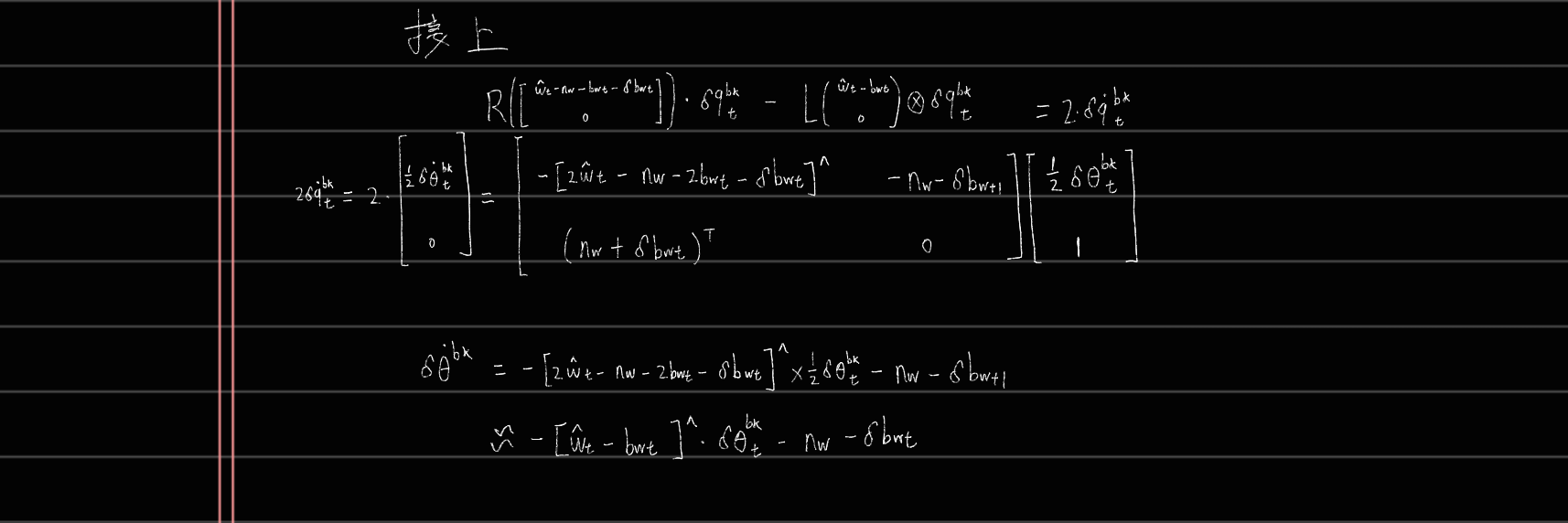
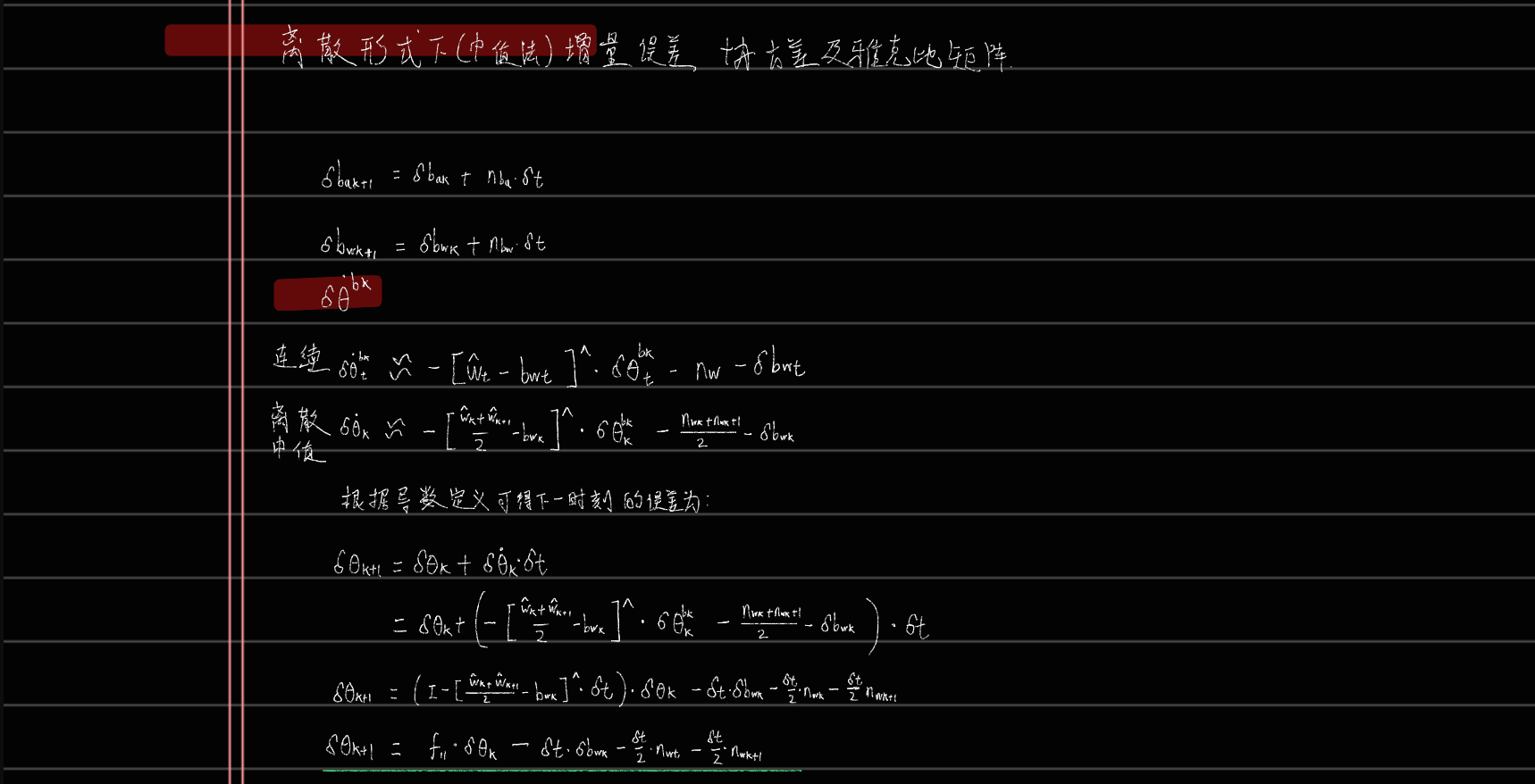
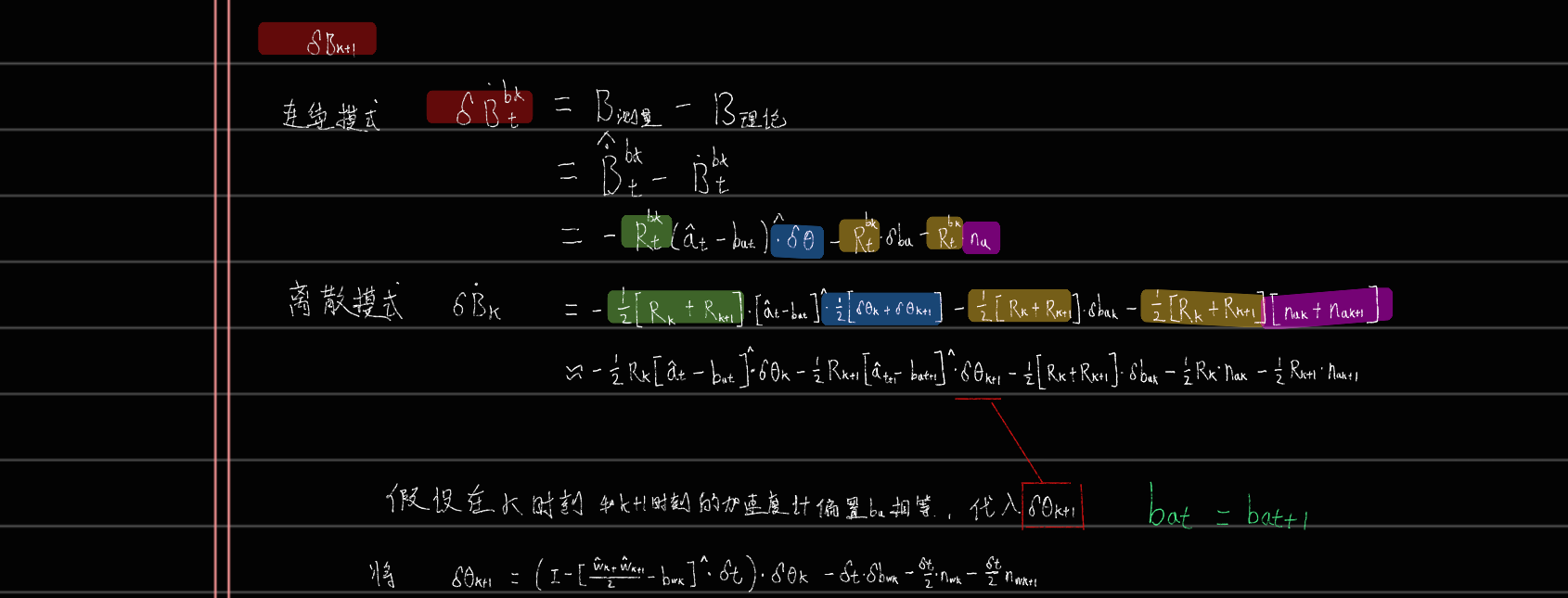
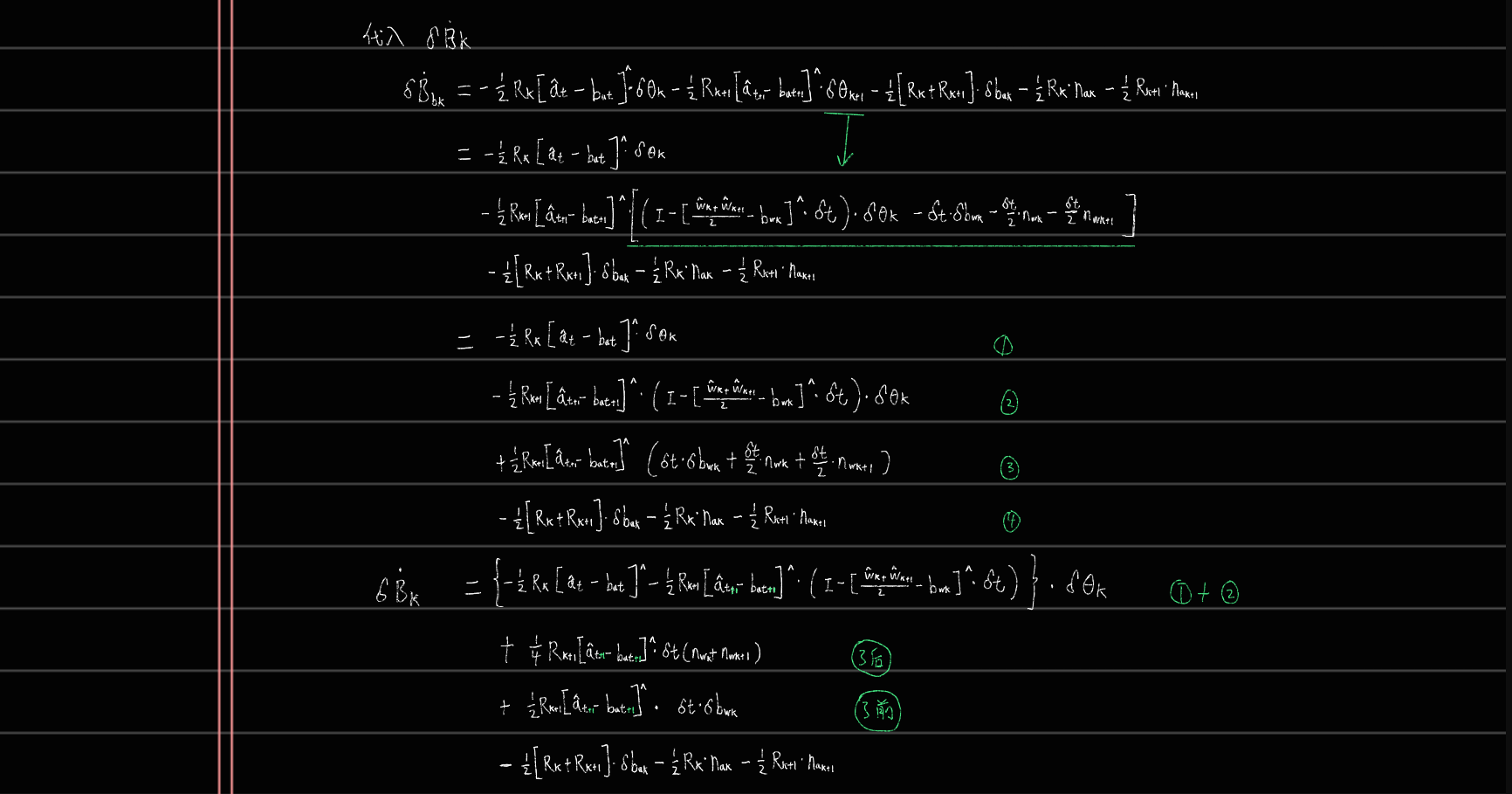
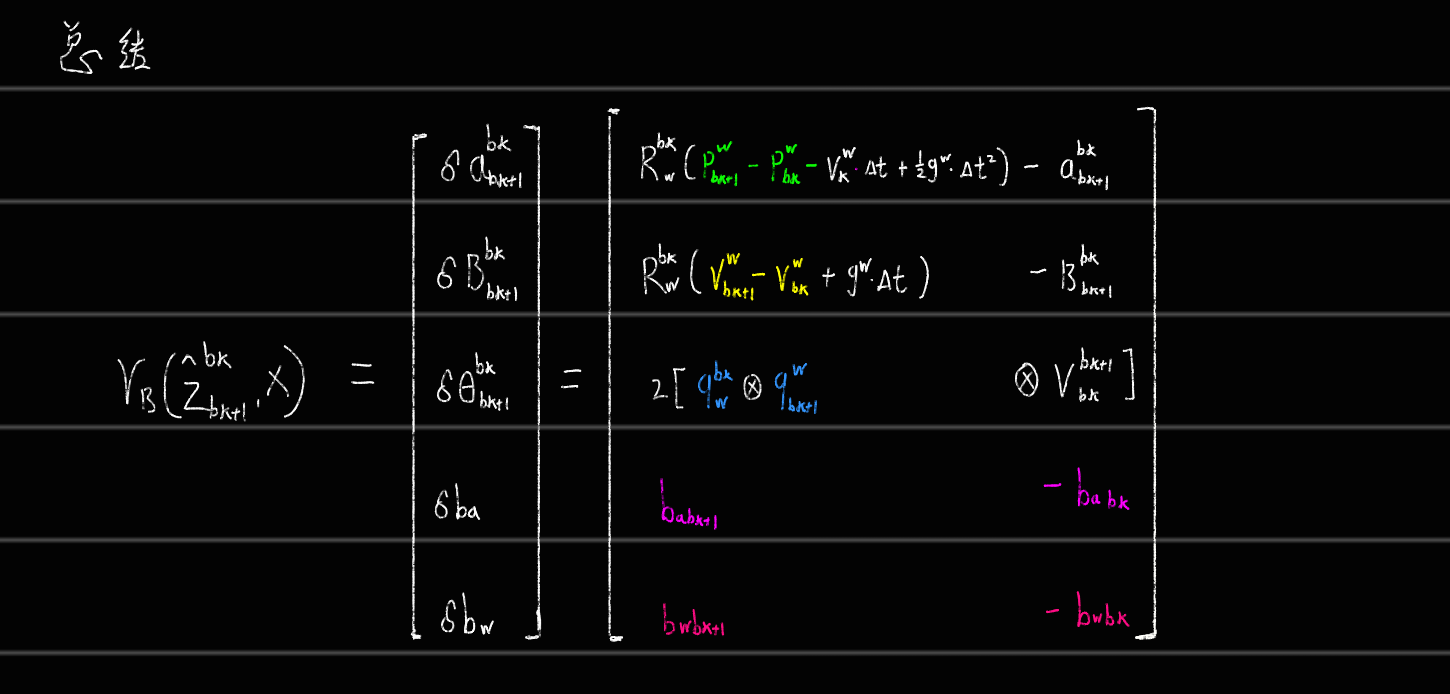
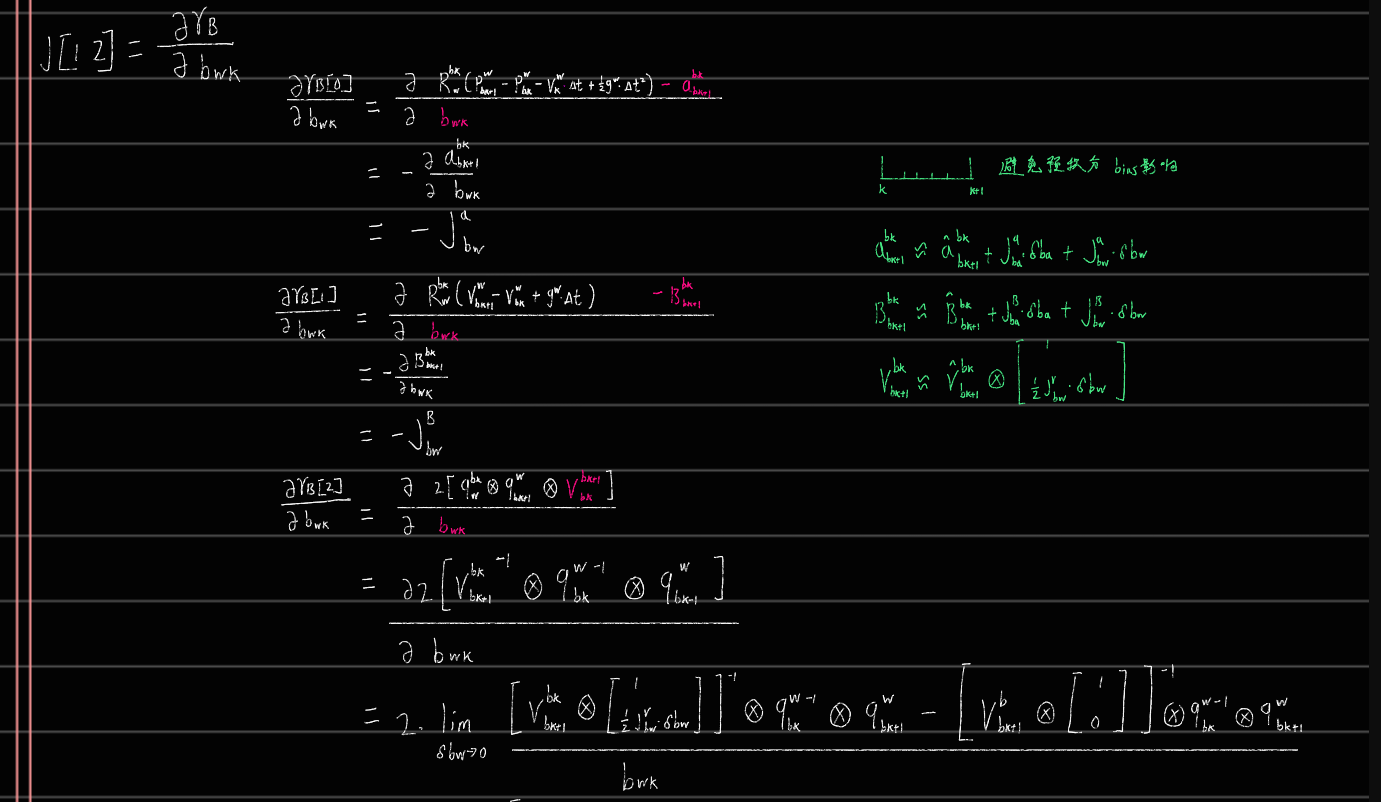
回顾预积分(离散形式)的误差递推公式,将测量噪声也考虑进模型:
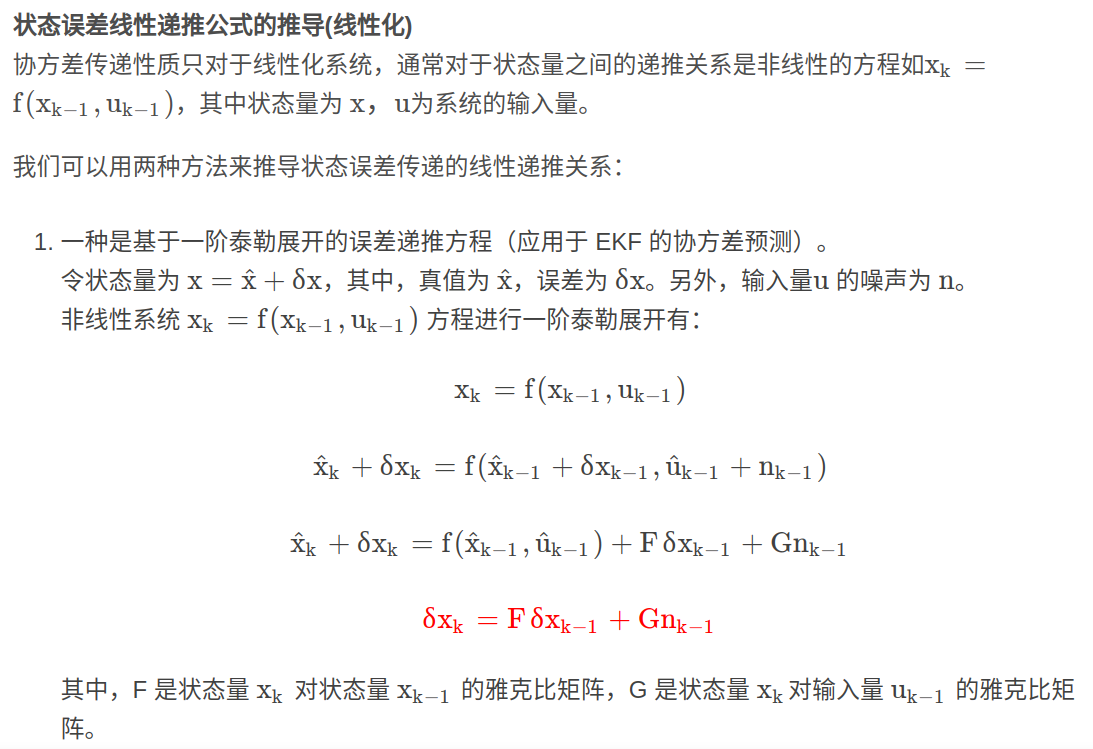
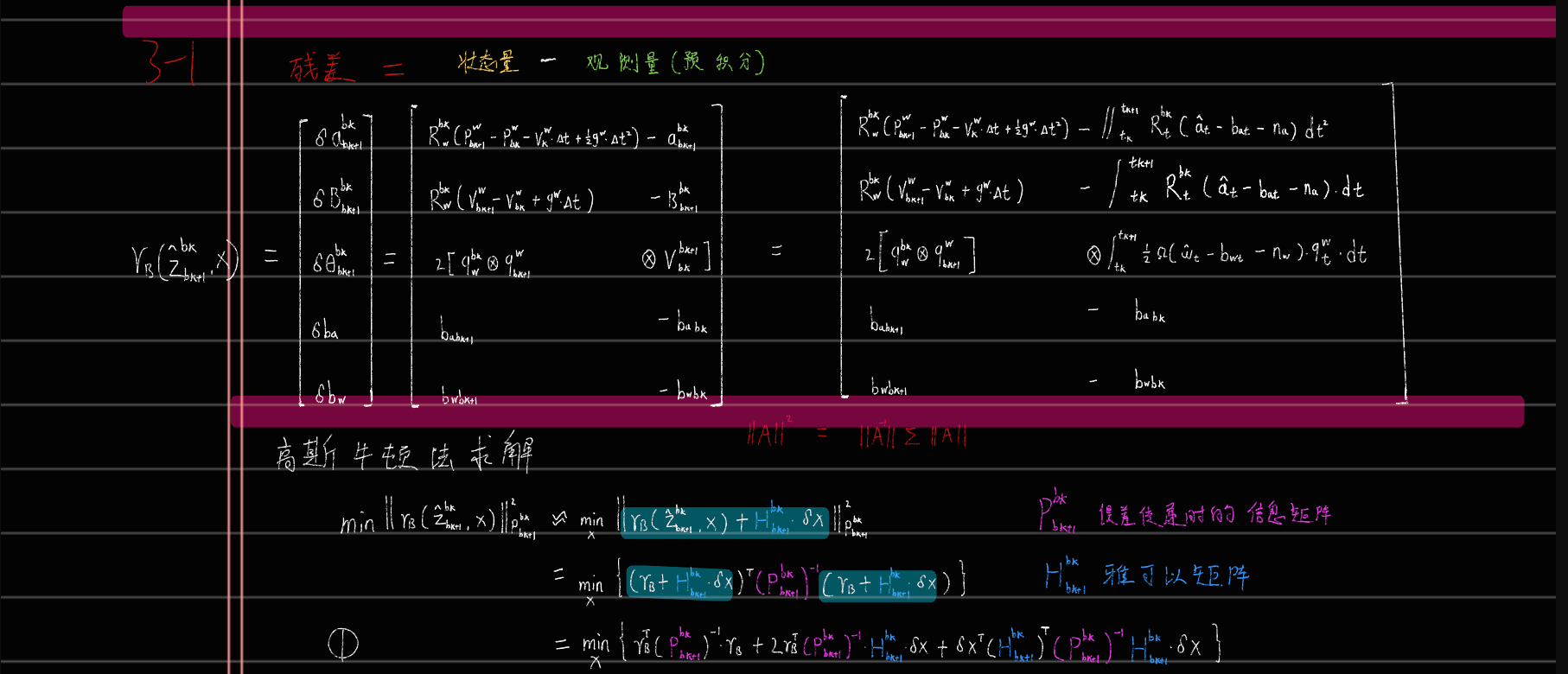
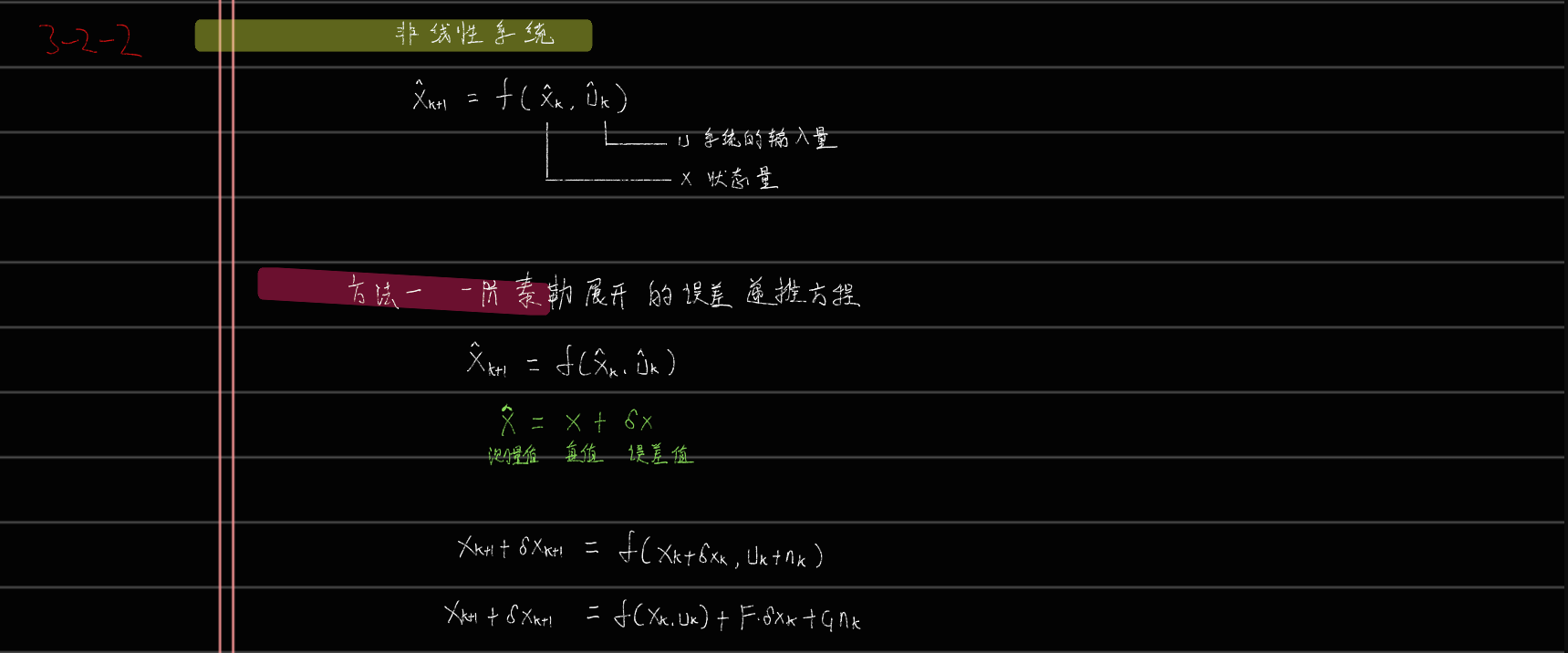
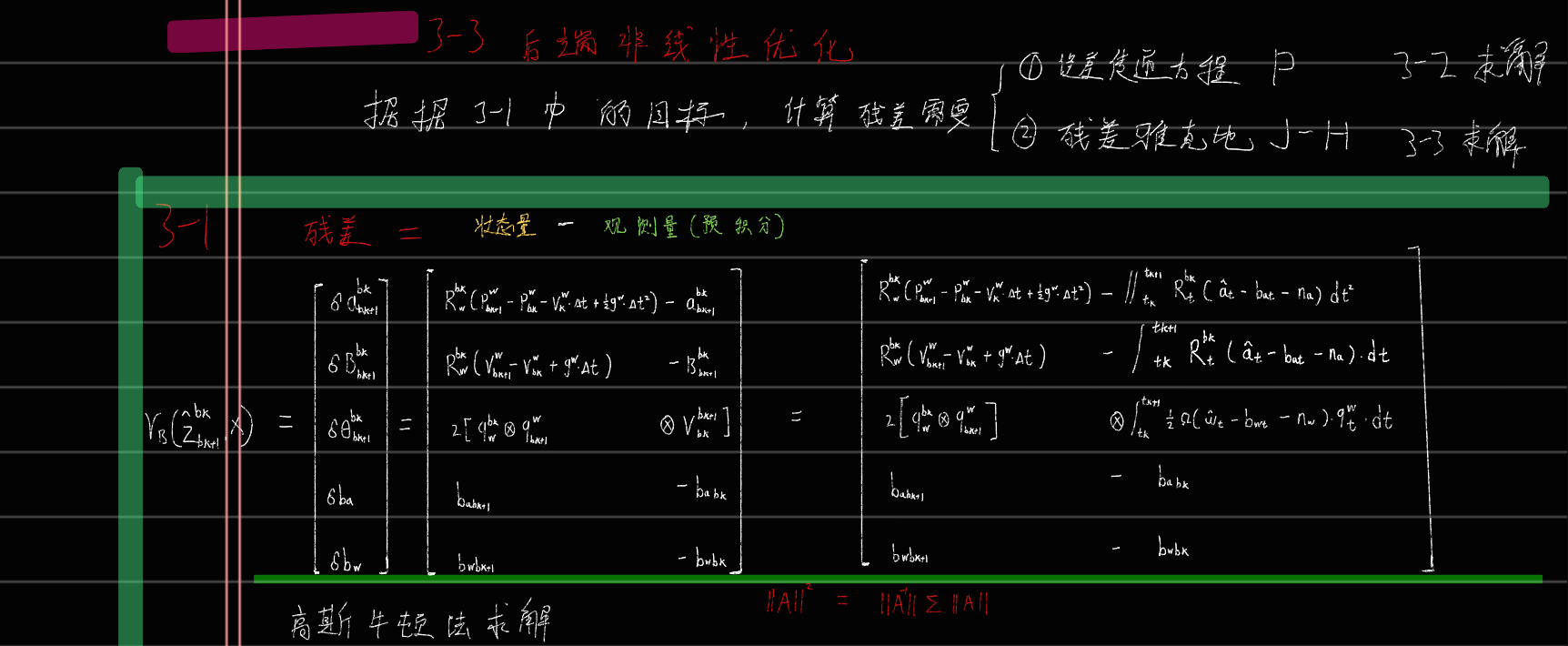
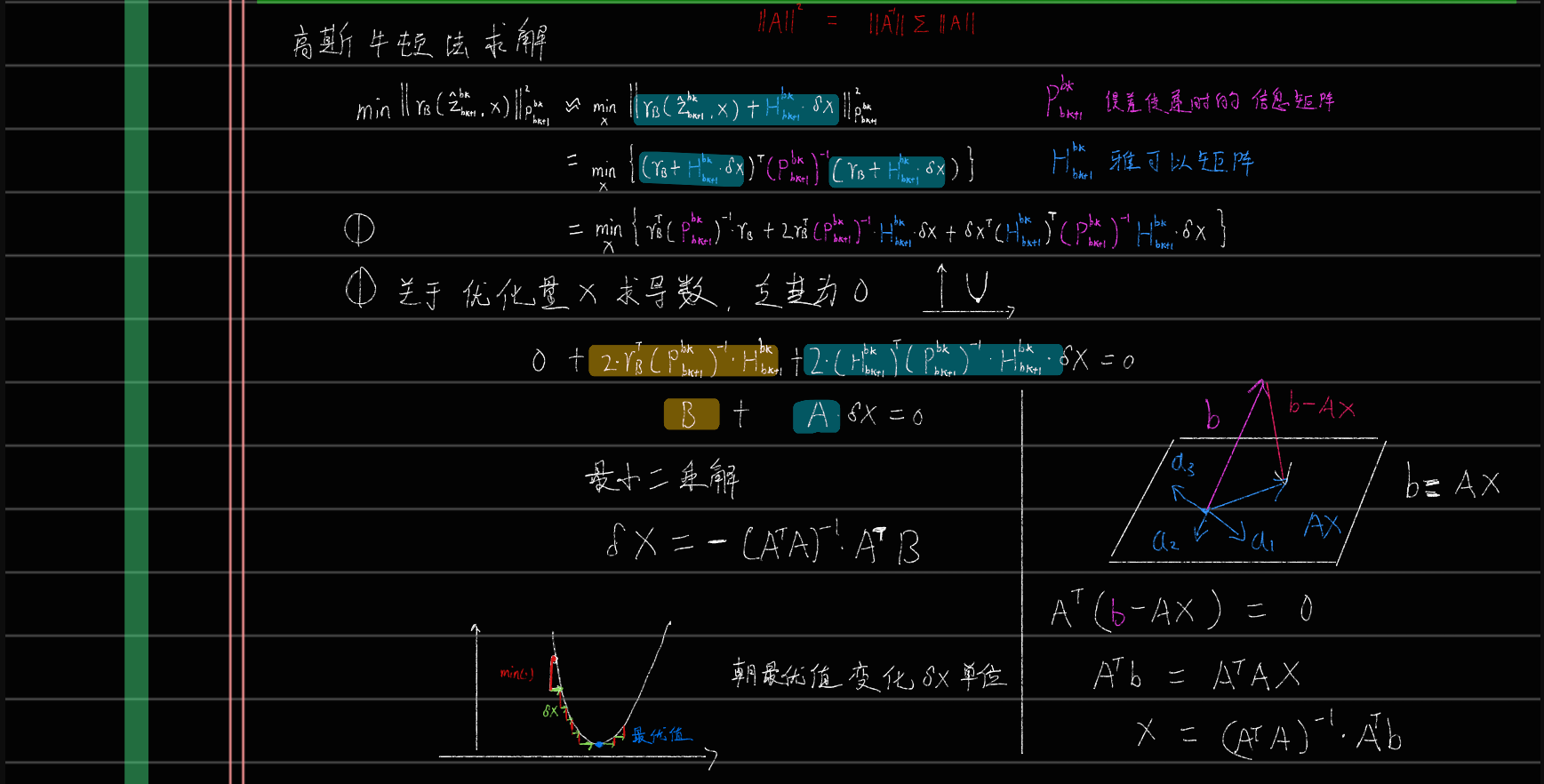
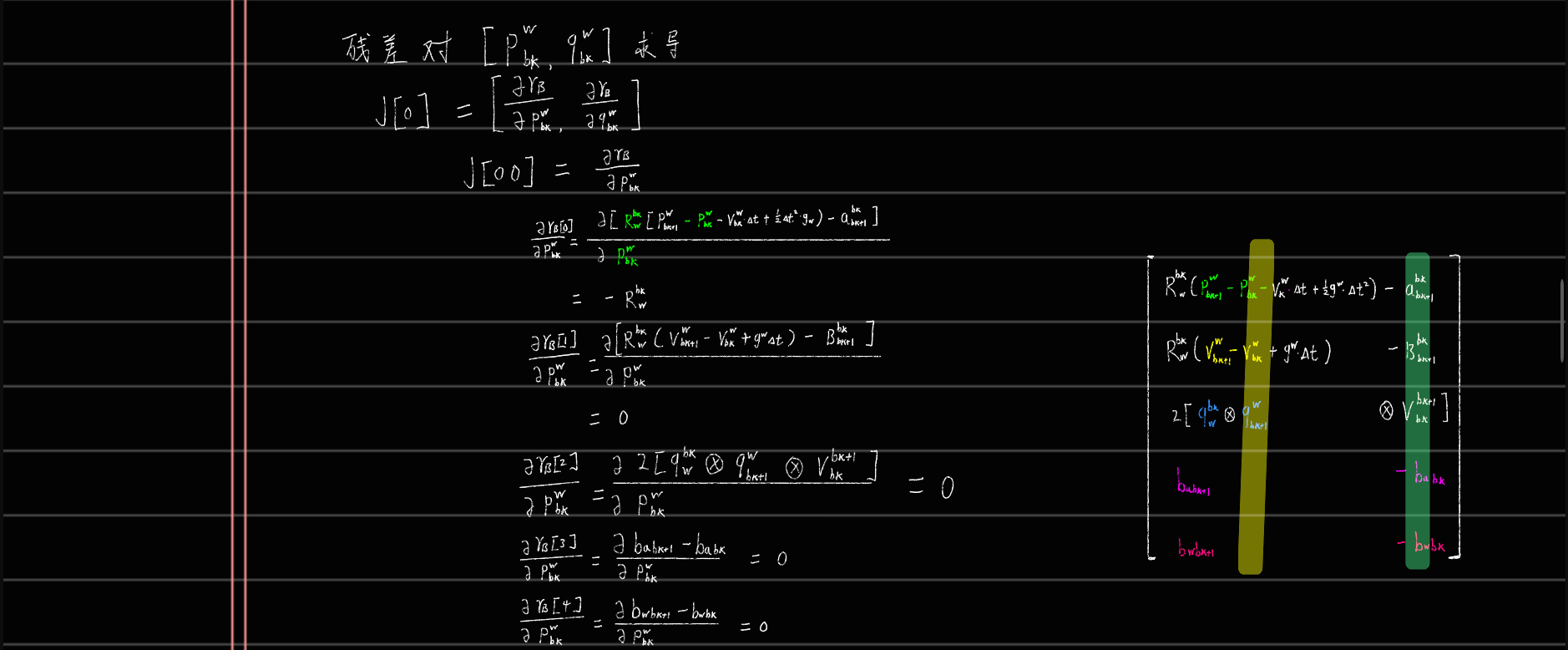
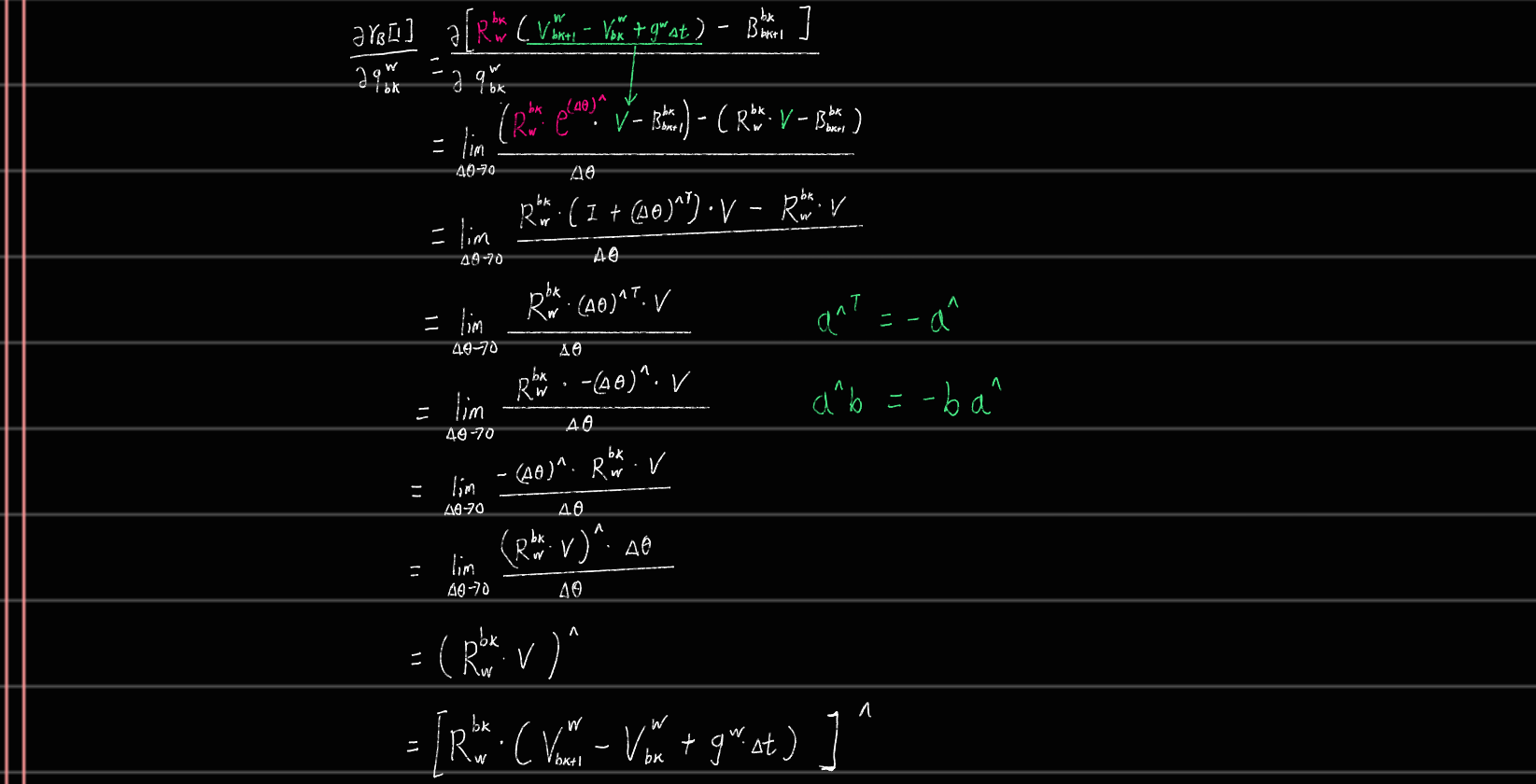
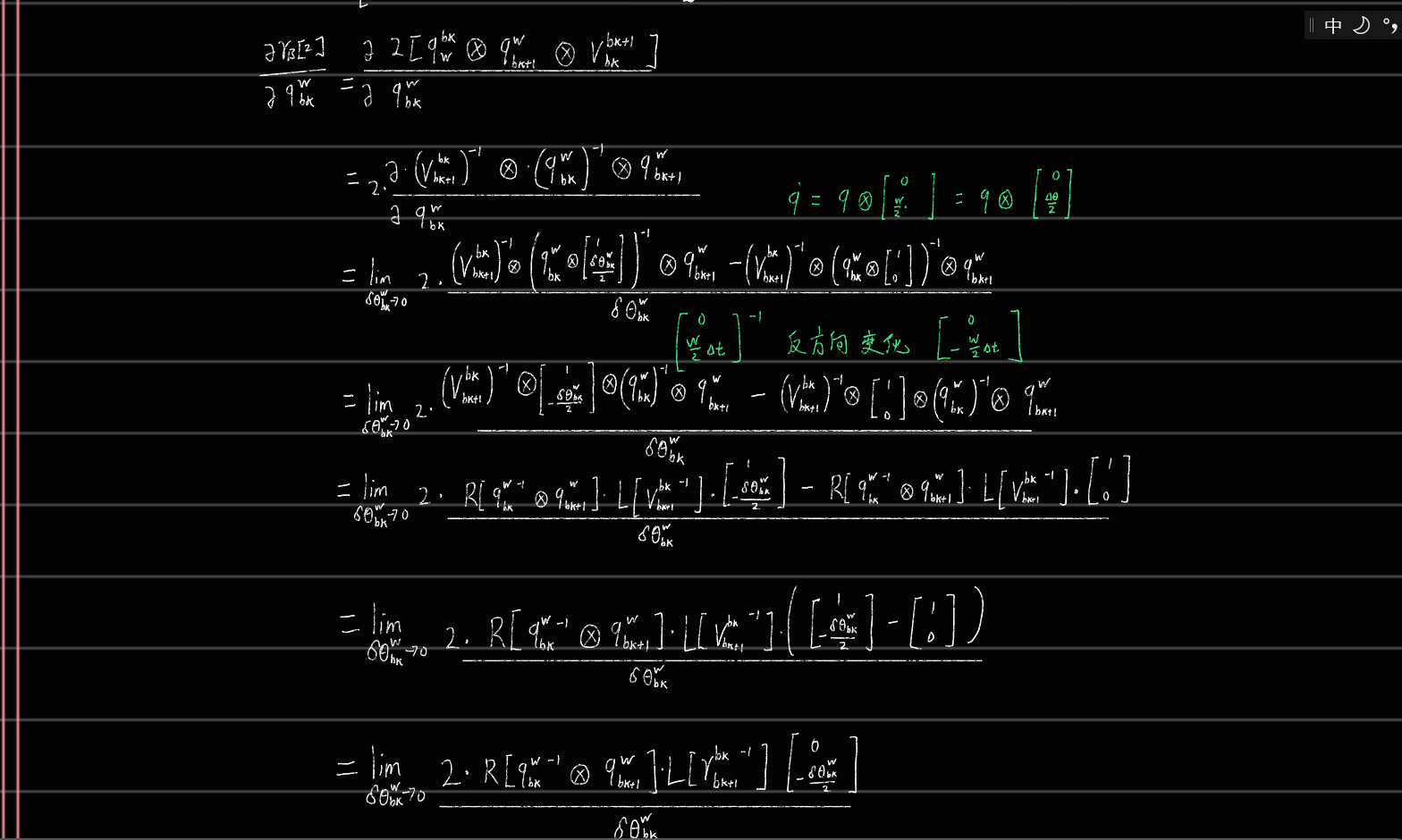
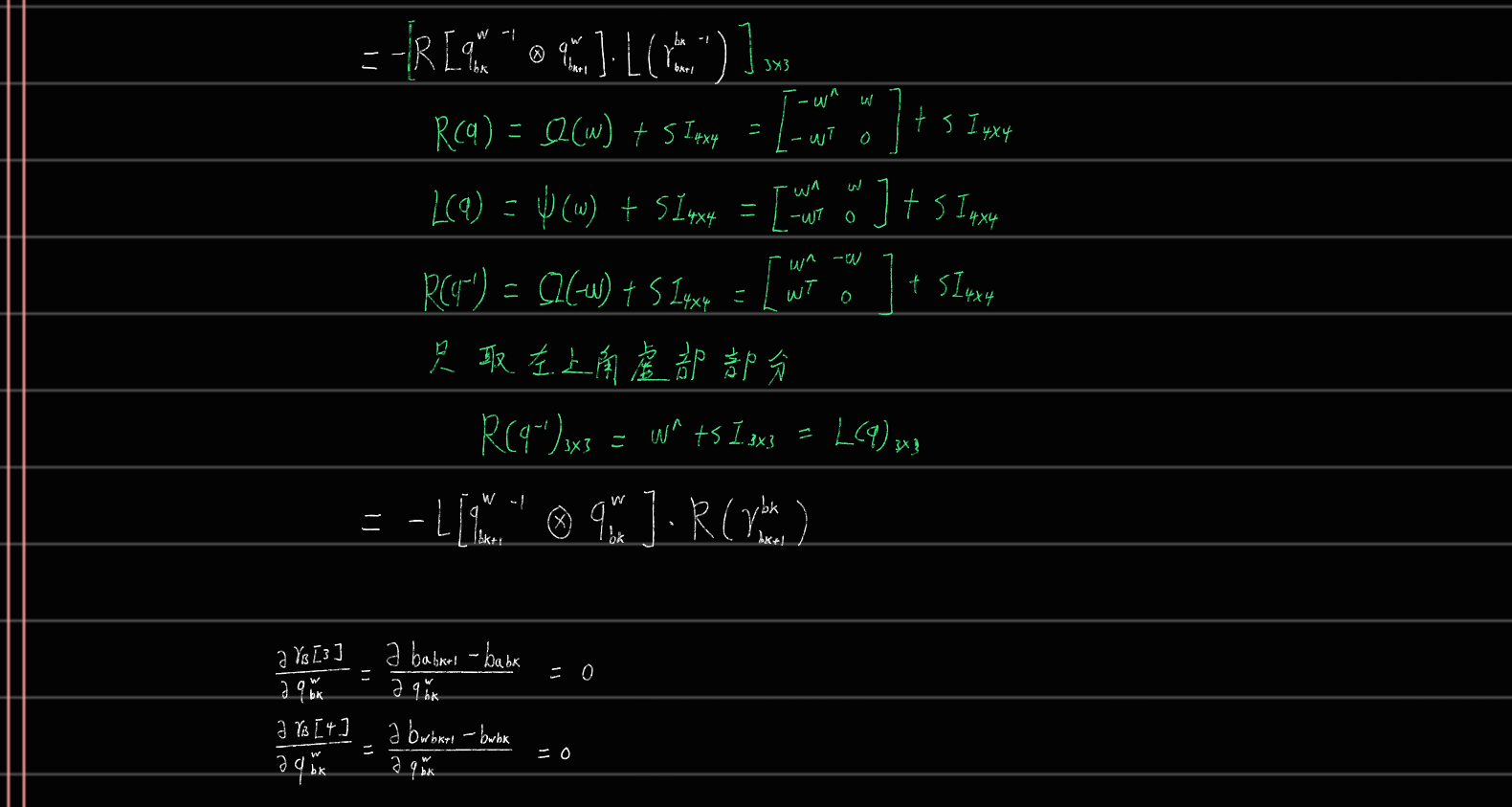
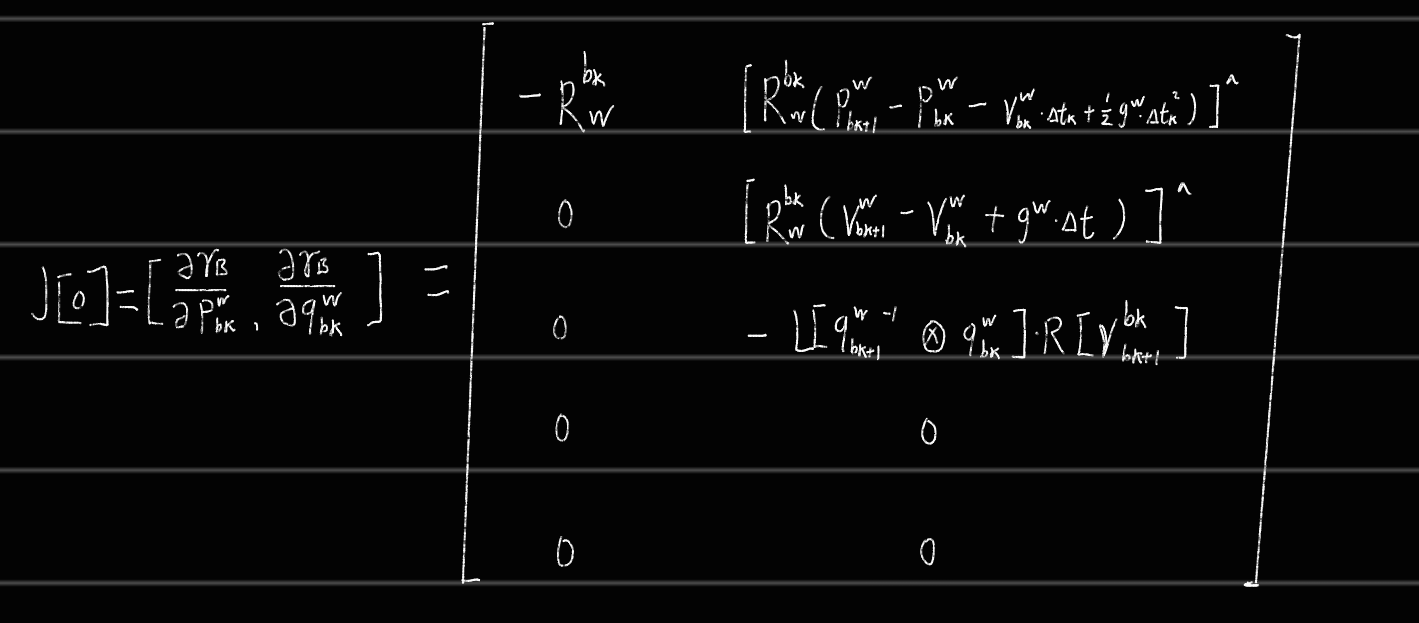
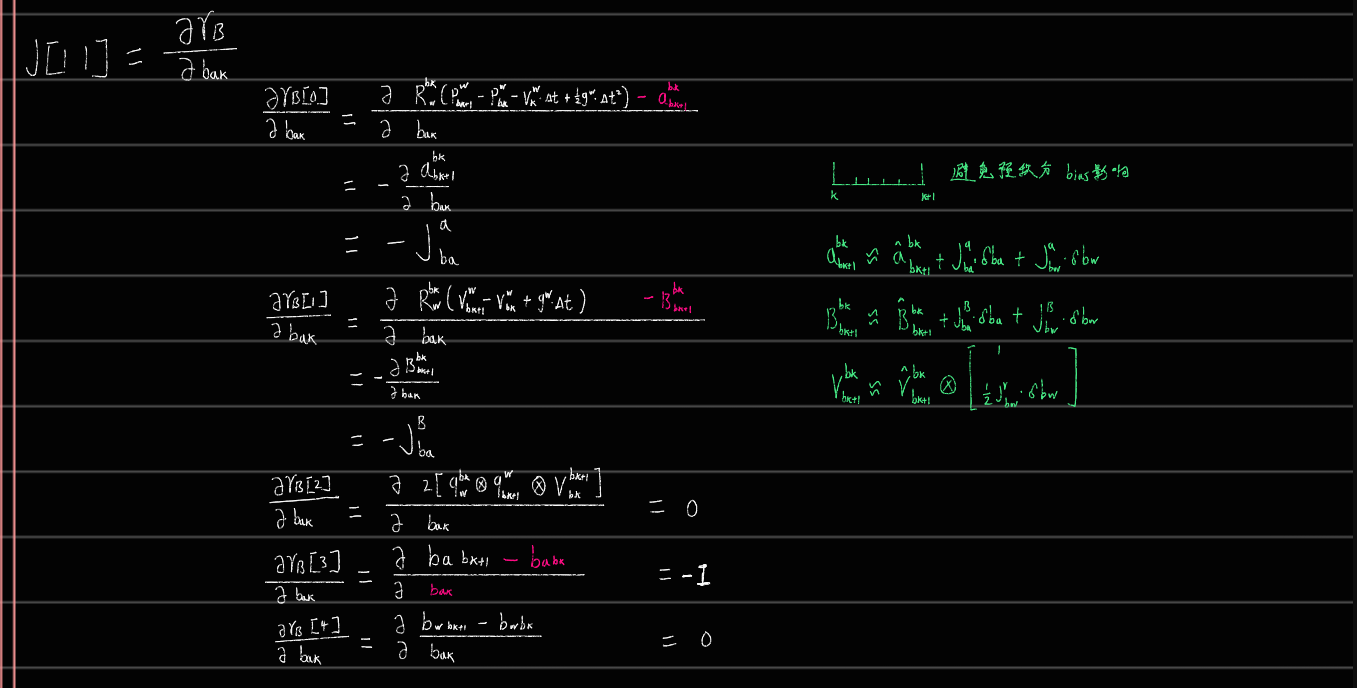
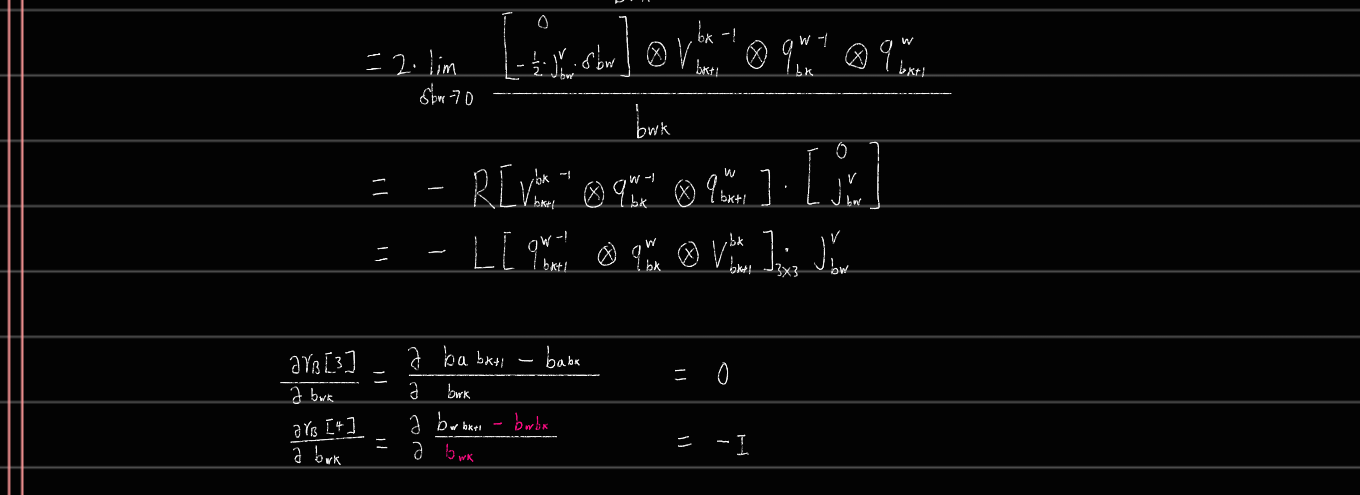
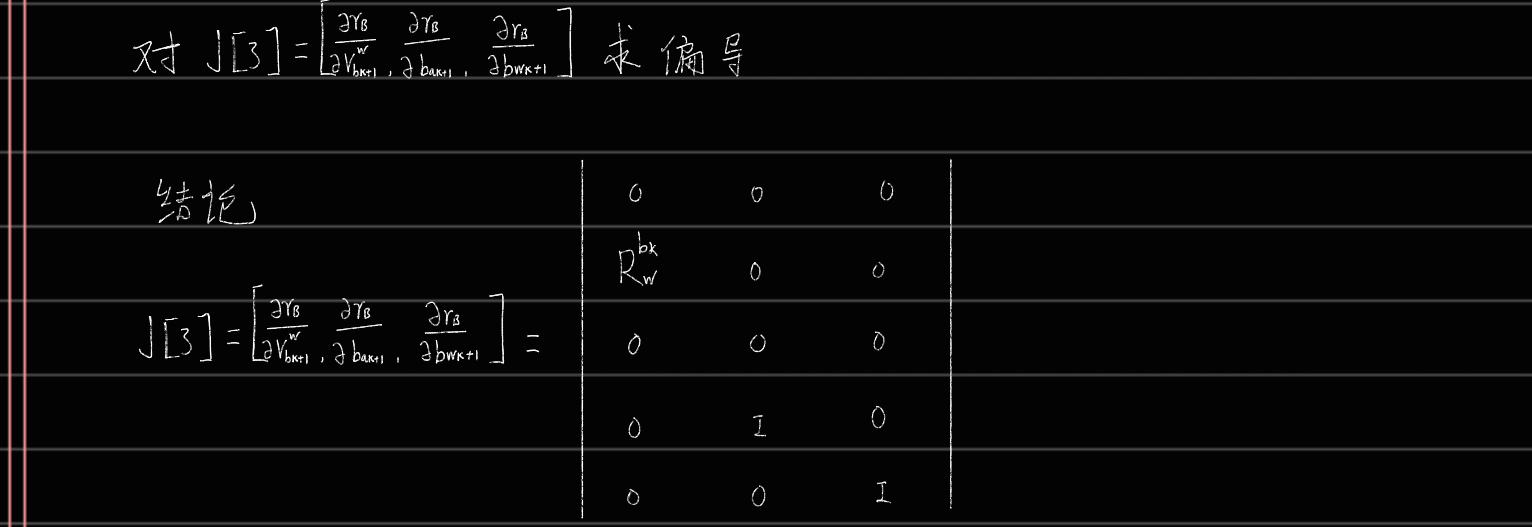
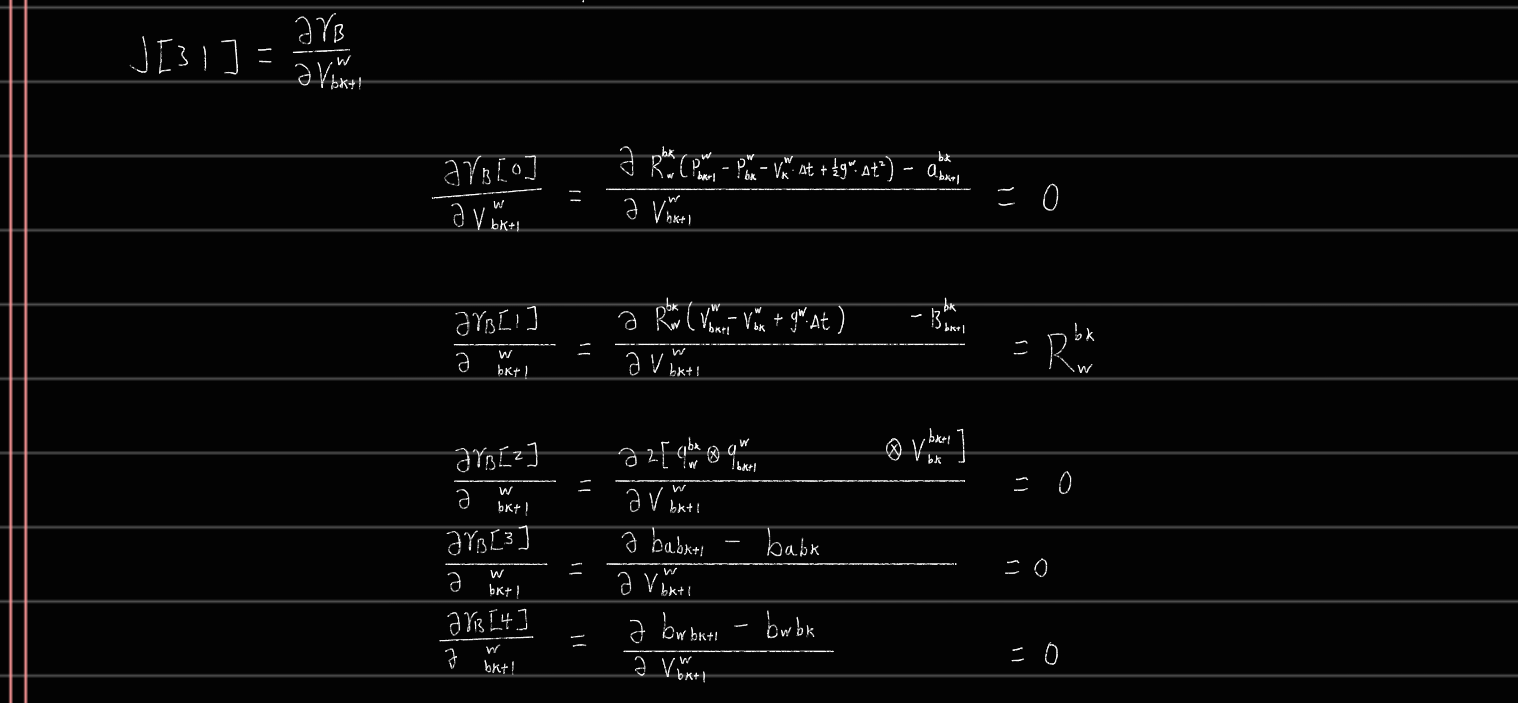
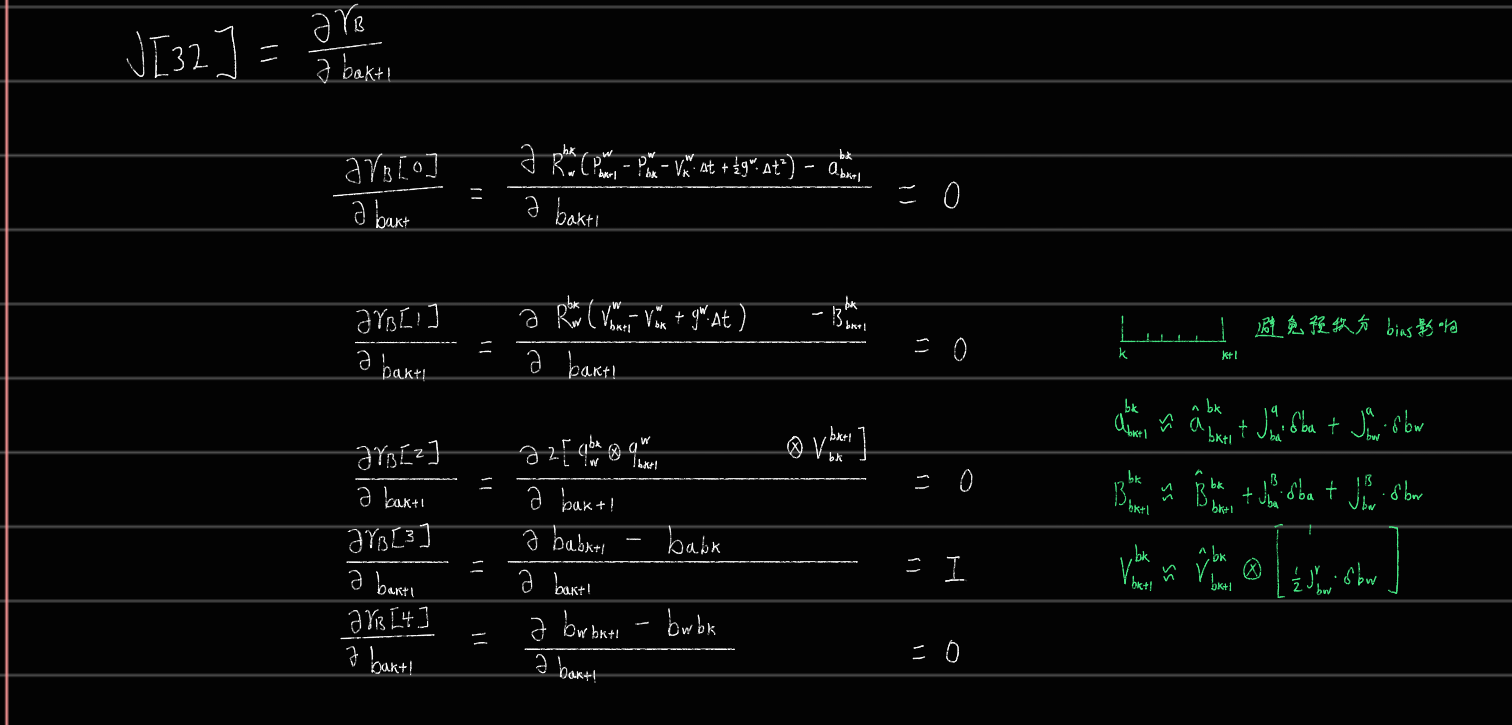
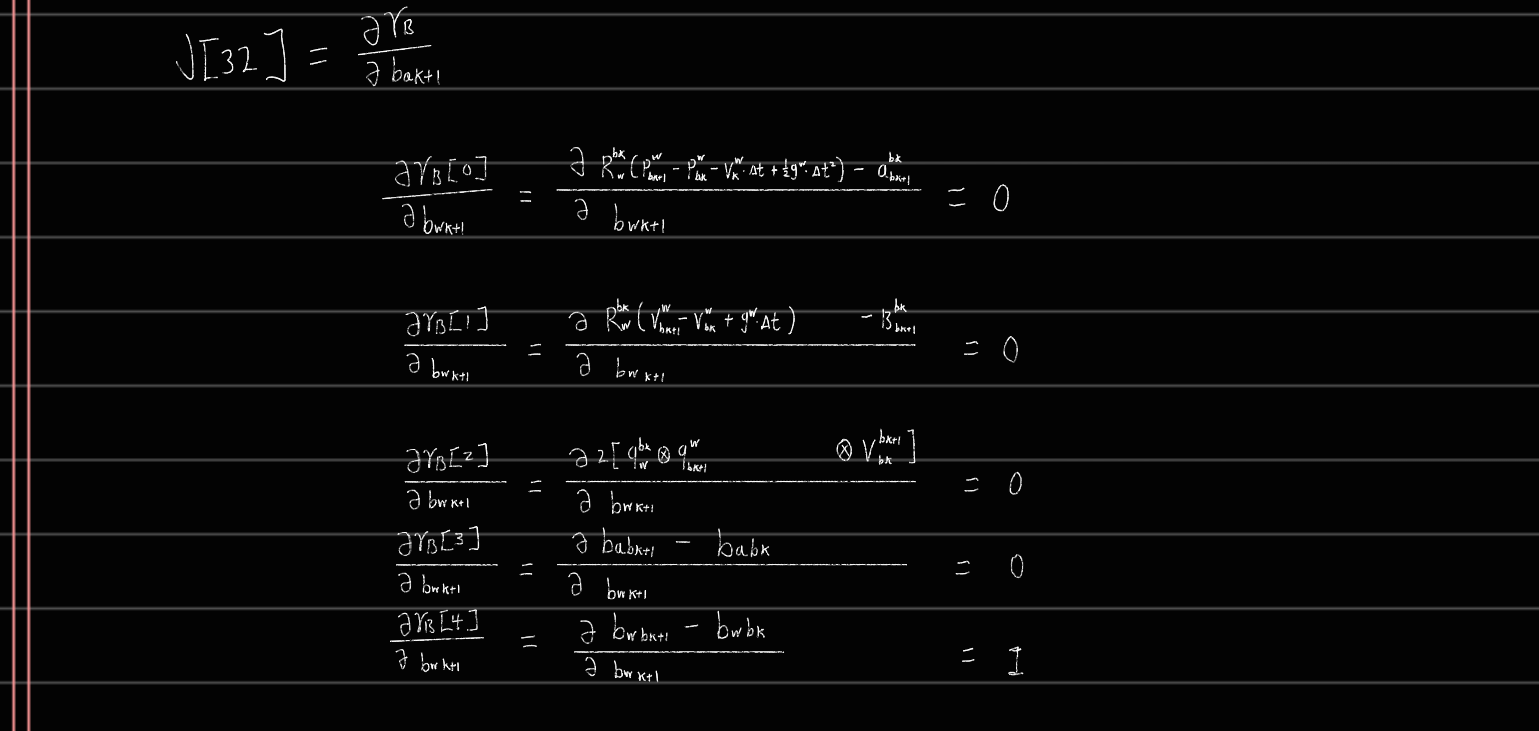
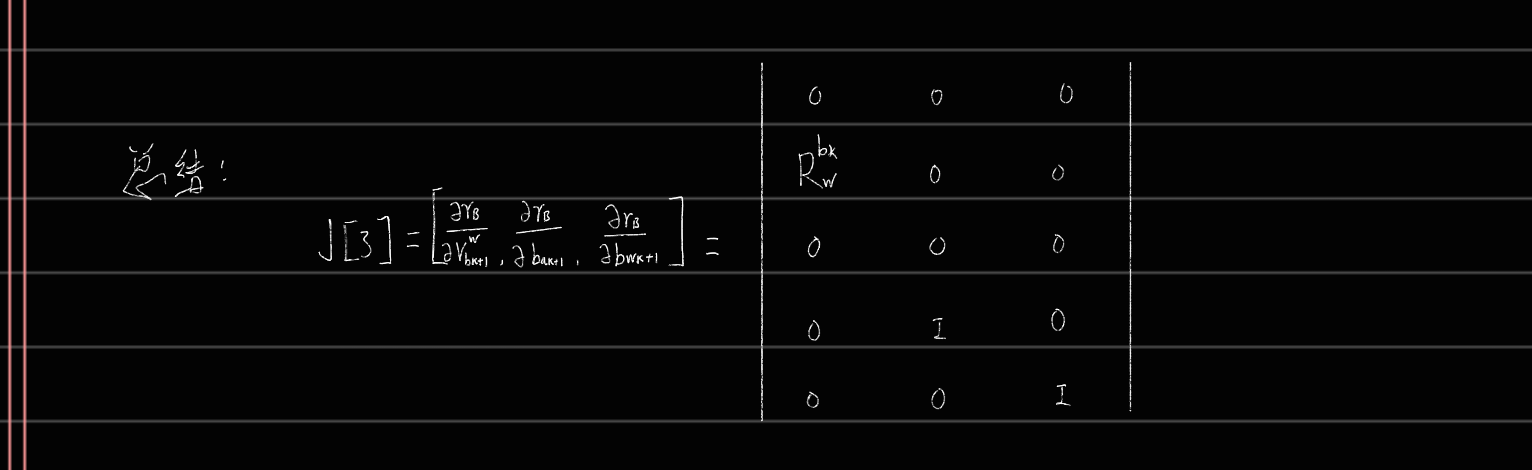
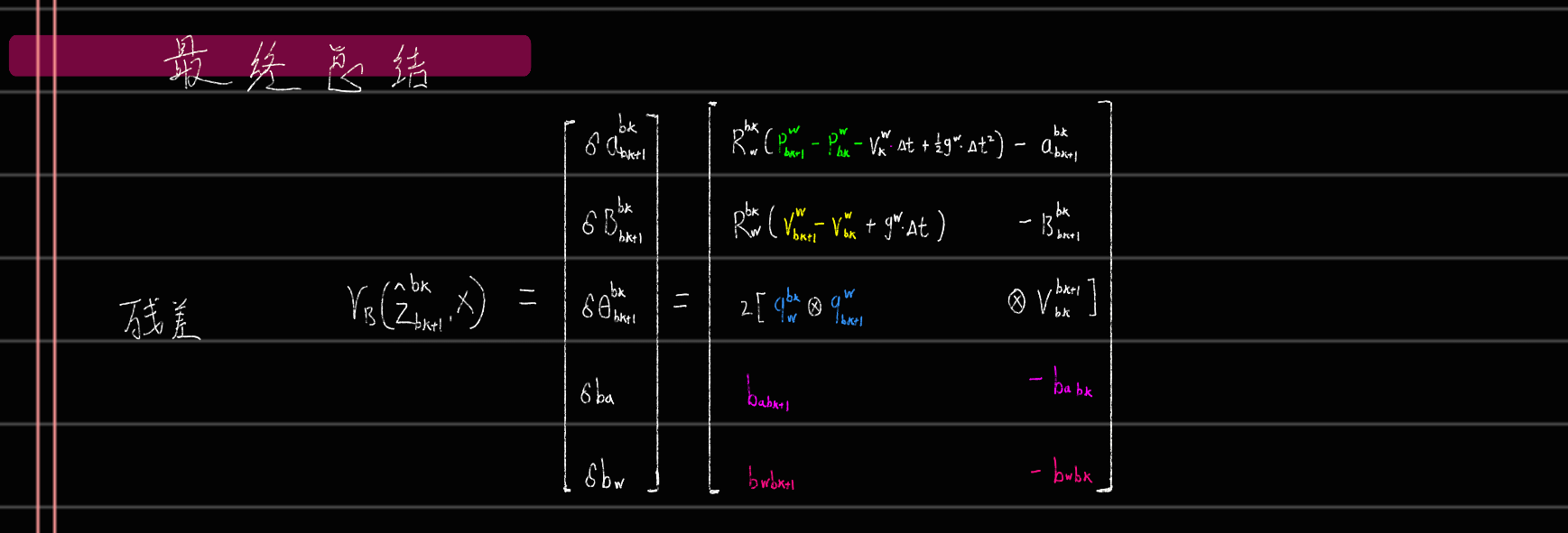
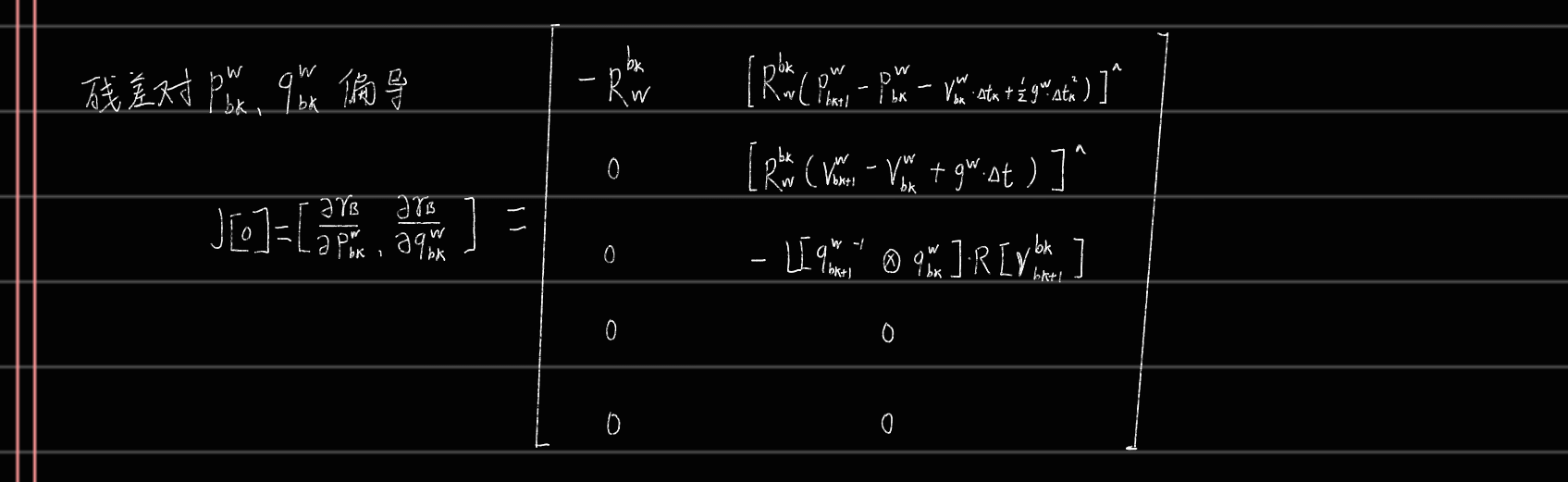
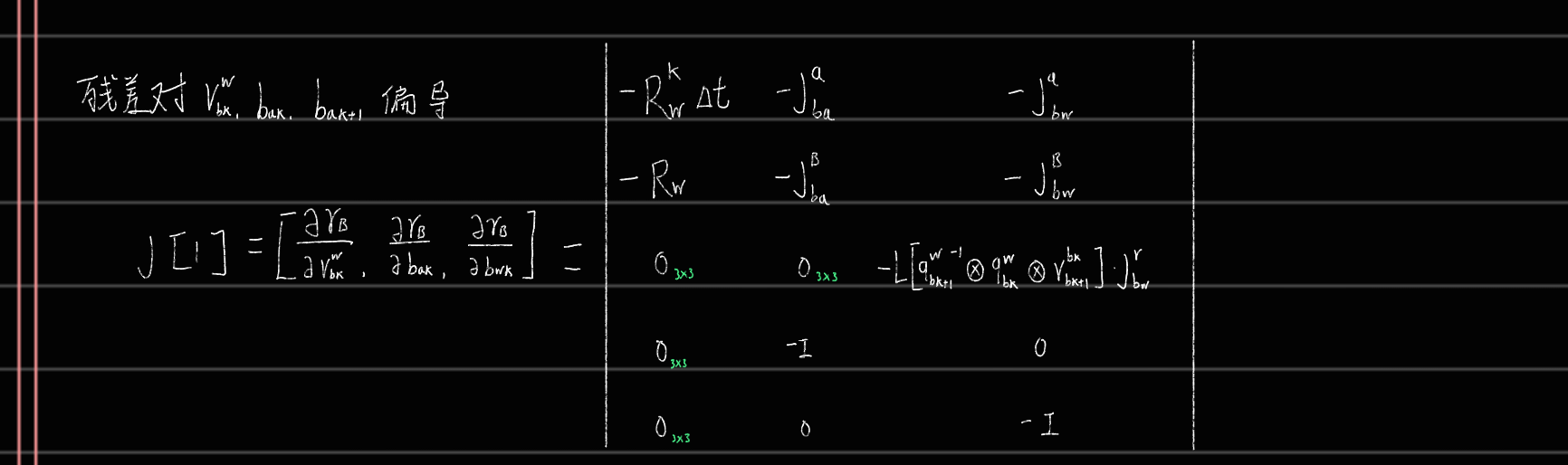
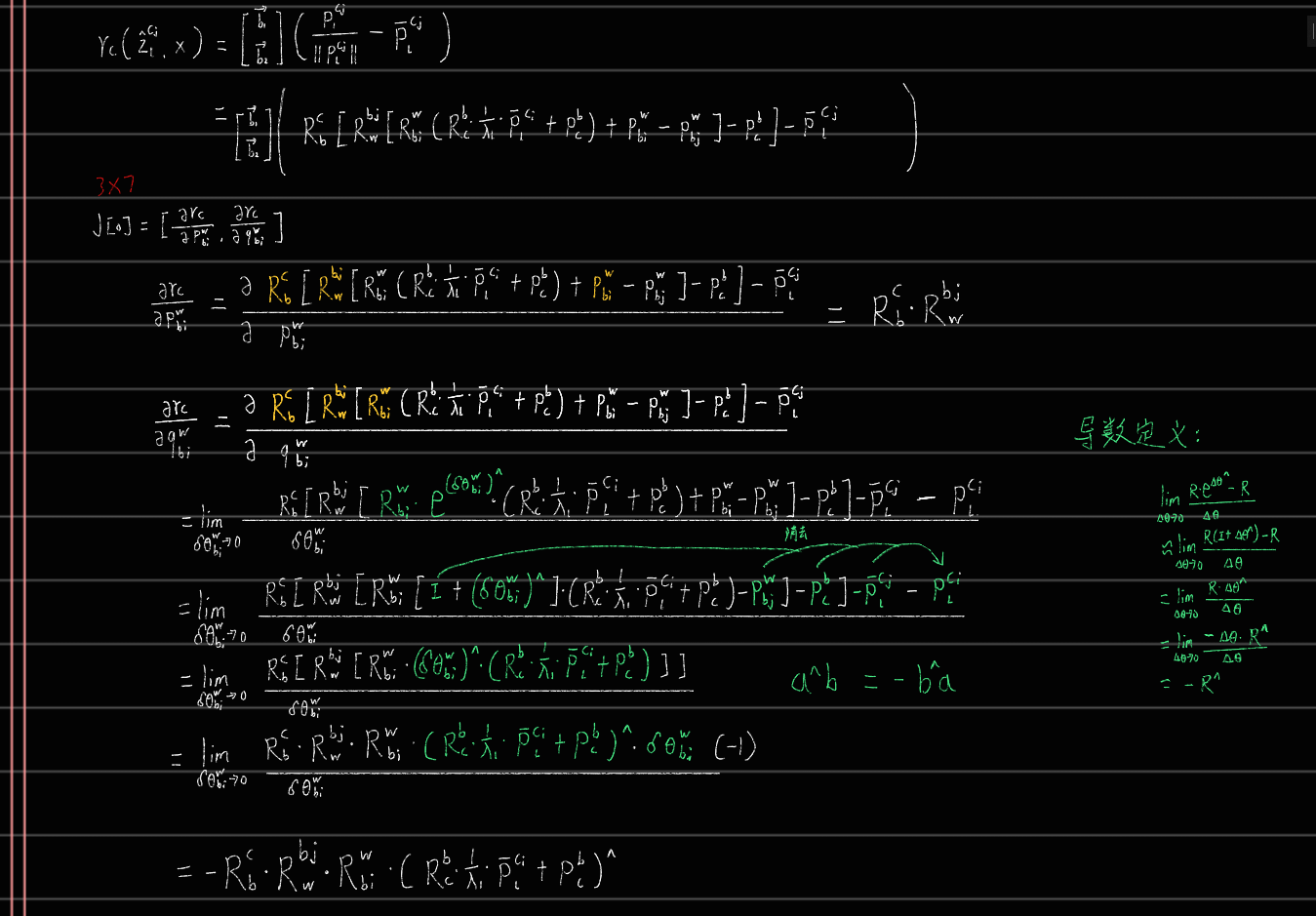
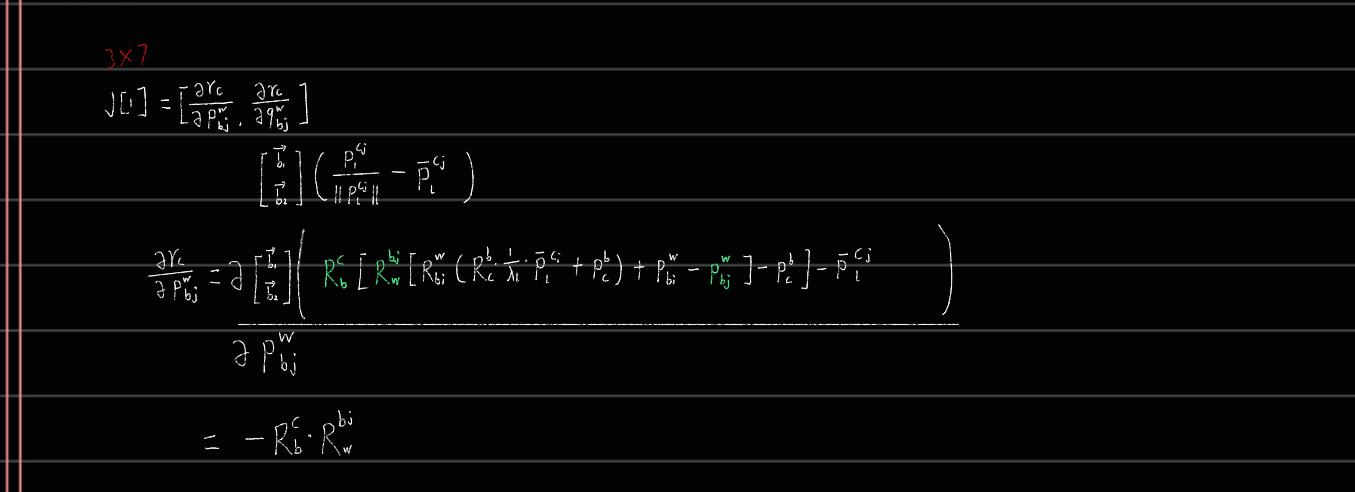
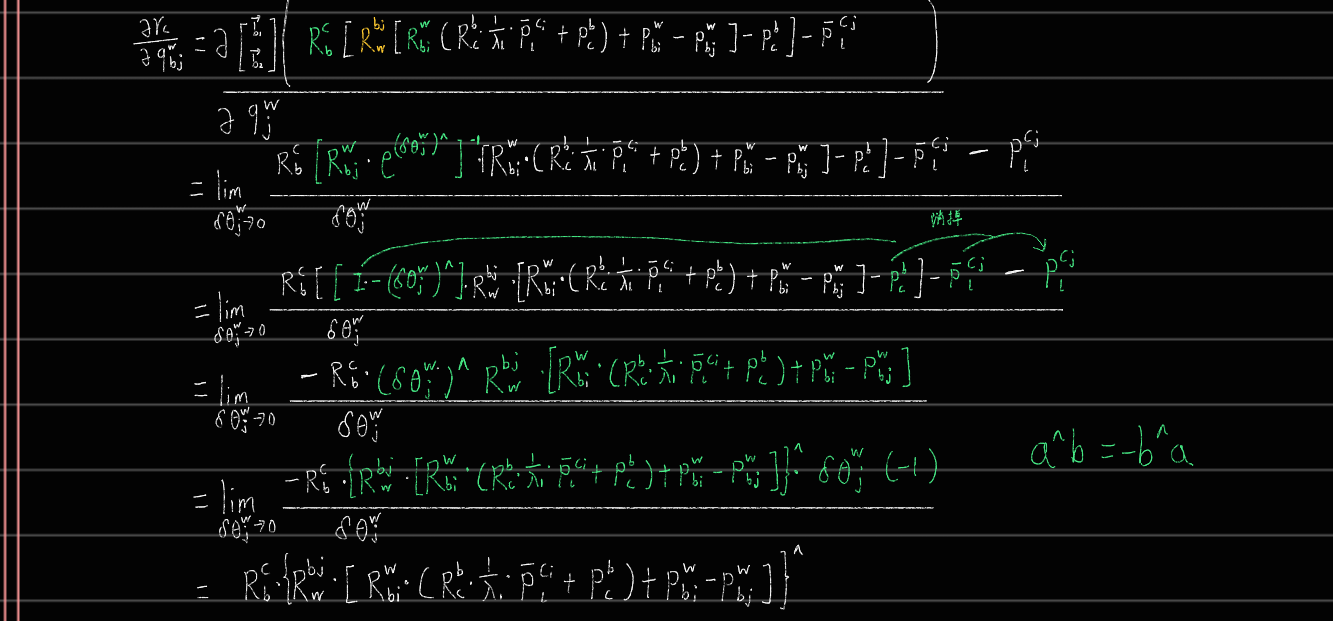
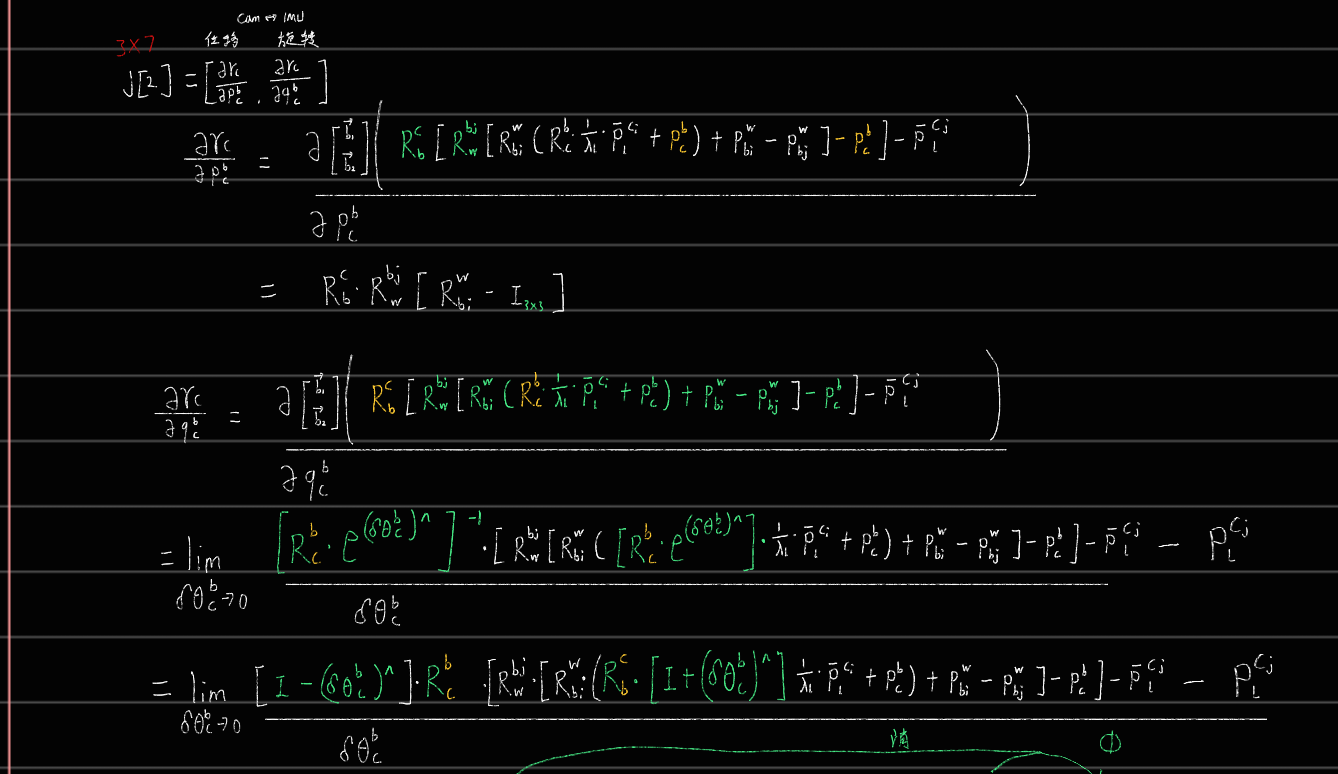
确定误差传递的状态量,噪声量,然后开始构建传递方程。用前面一阶泰勒展开的推导方式,我们能推导出如下的形式:























 浙公网安备 33010602011771号
浙公网安备 33010602011771号