
SLAM基础-扩展卡尔曼滤波
https://blog.csdn.net/gwplovekimi/article/details/108903215
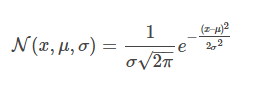
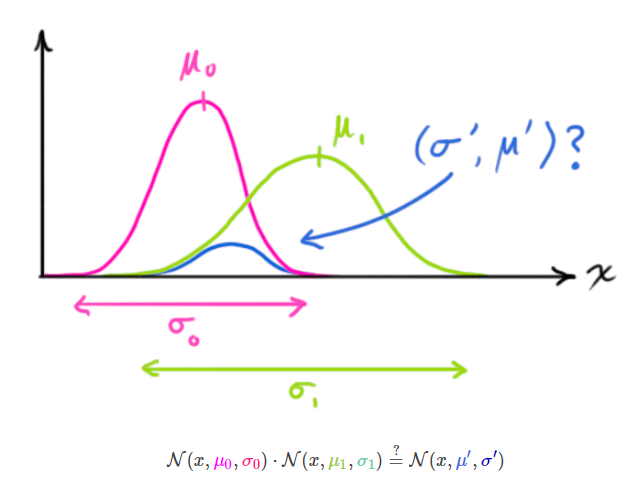
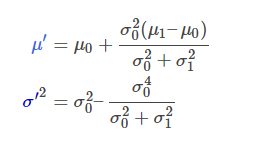
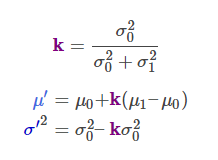
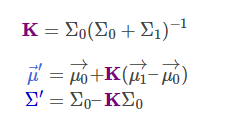
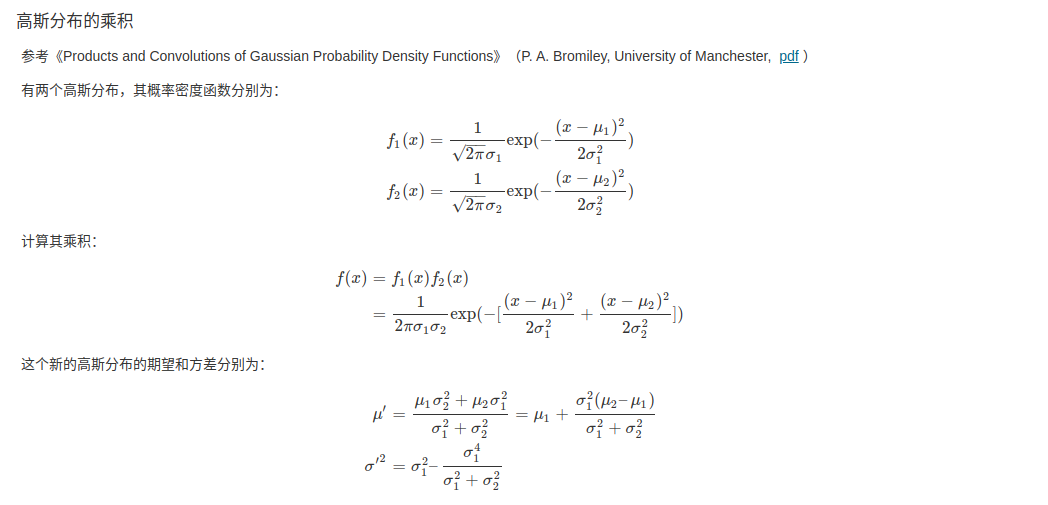
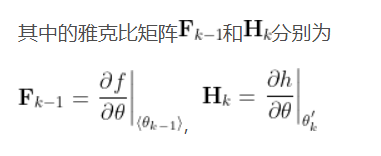
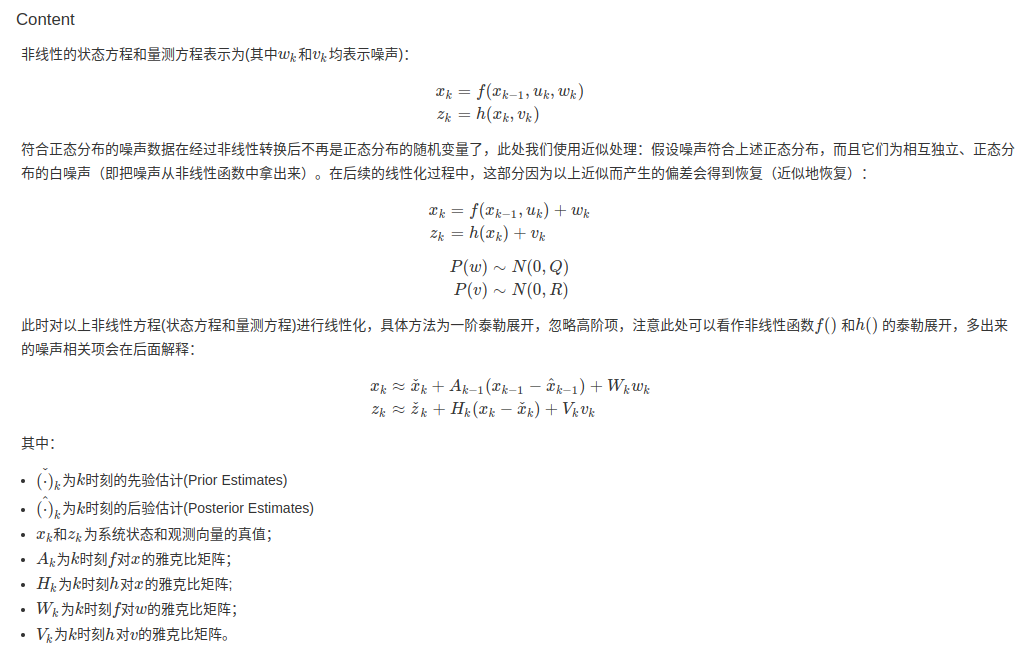
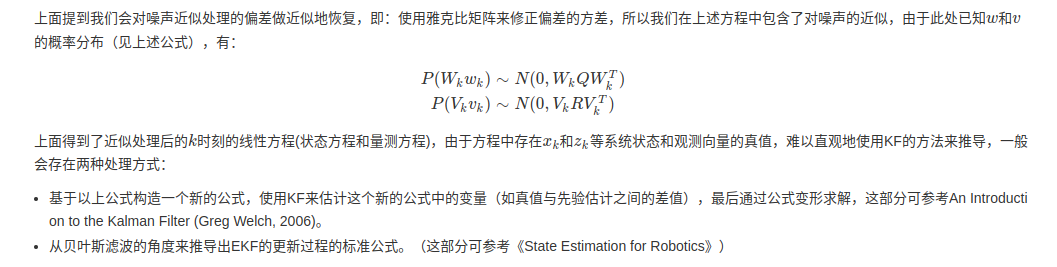
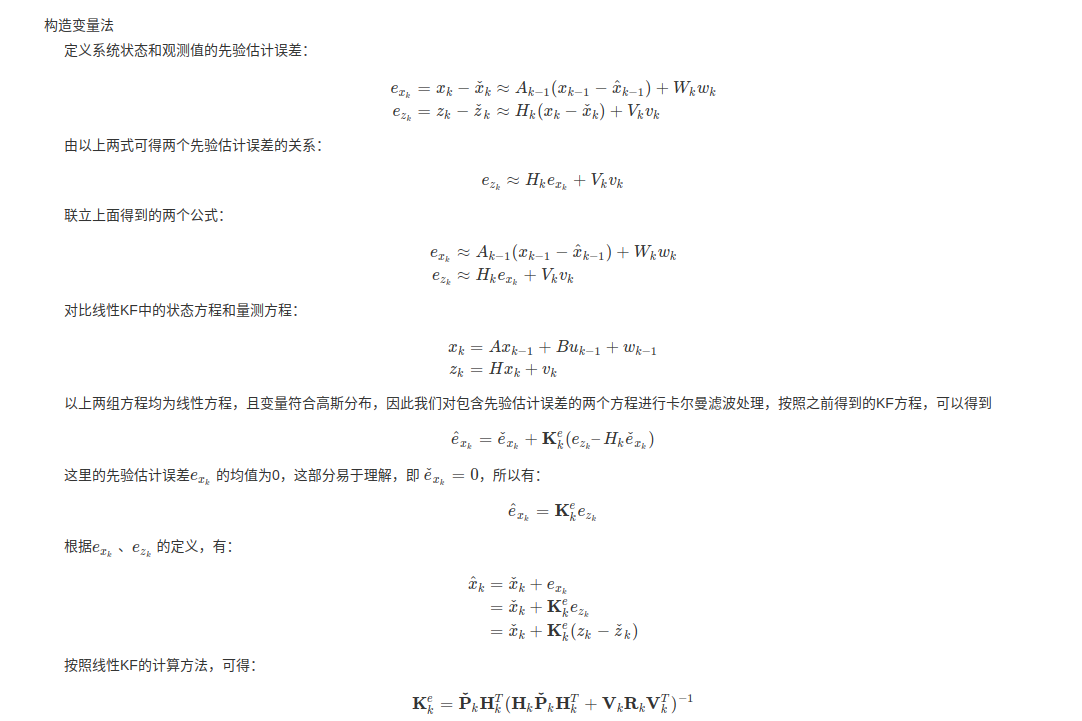
数学基础
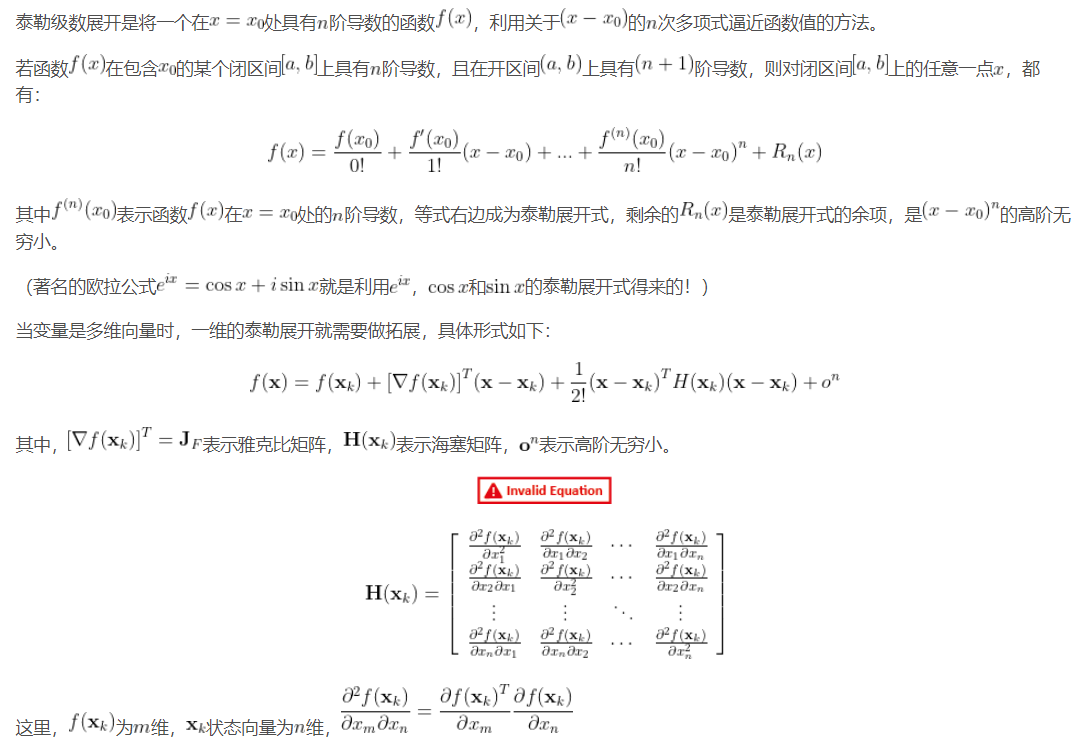
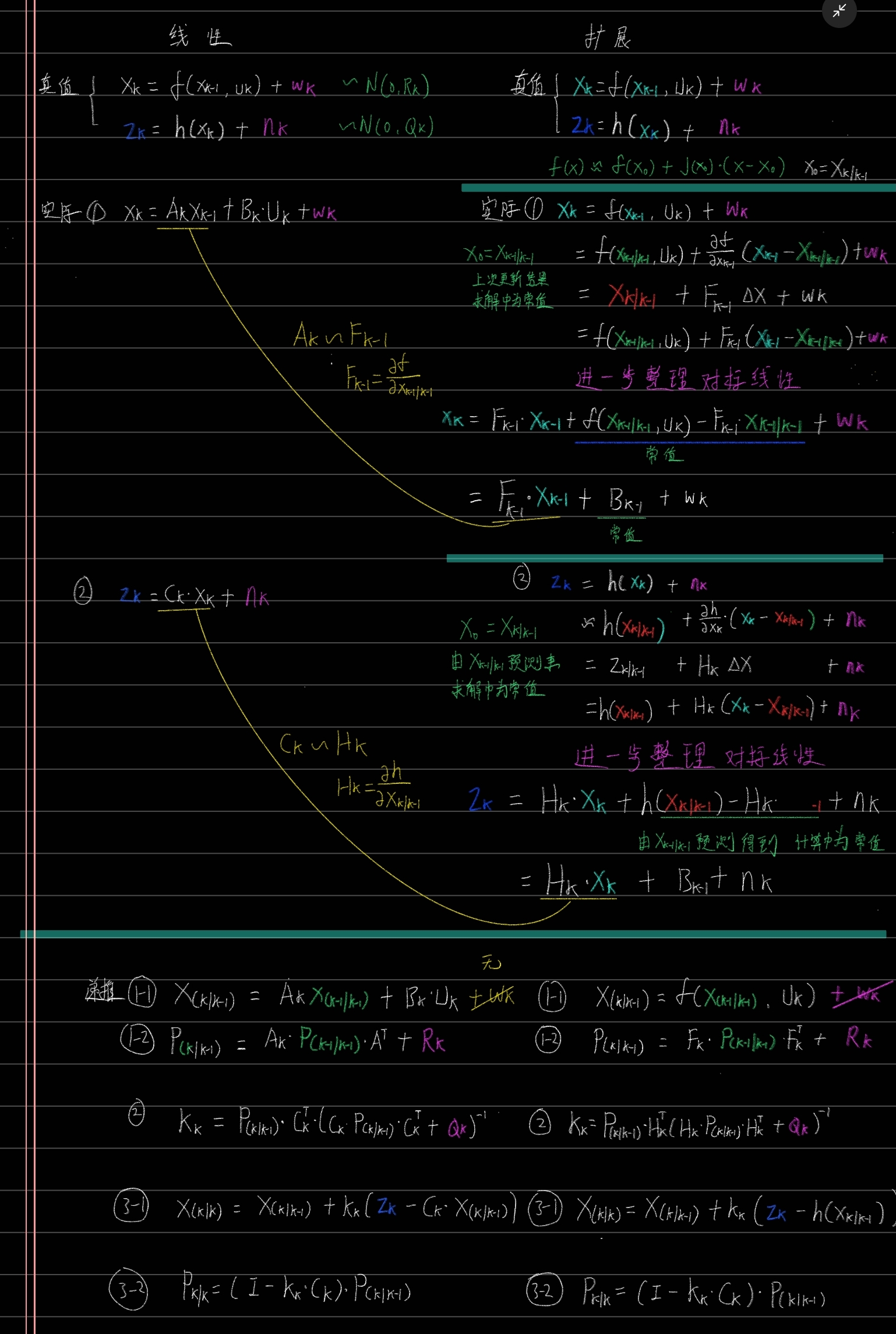
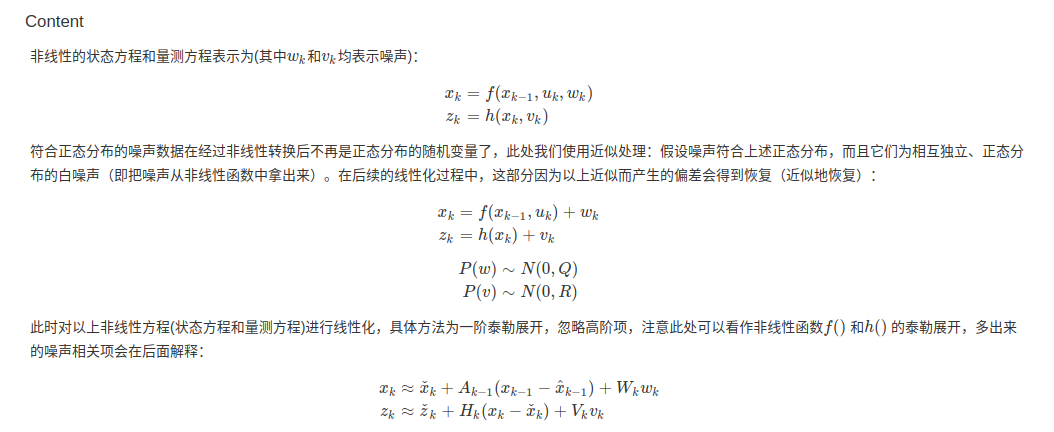
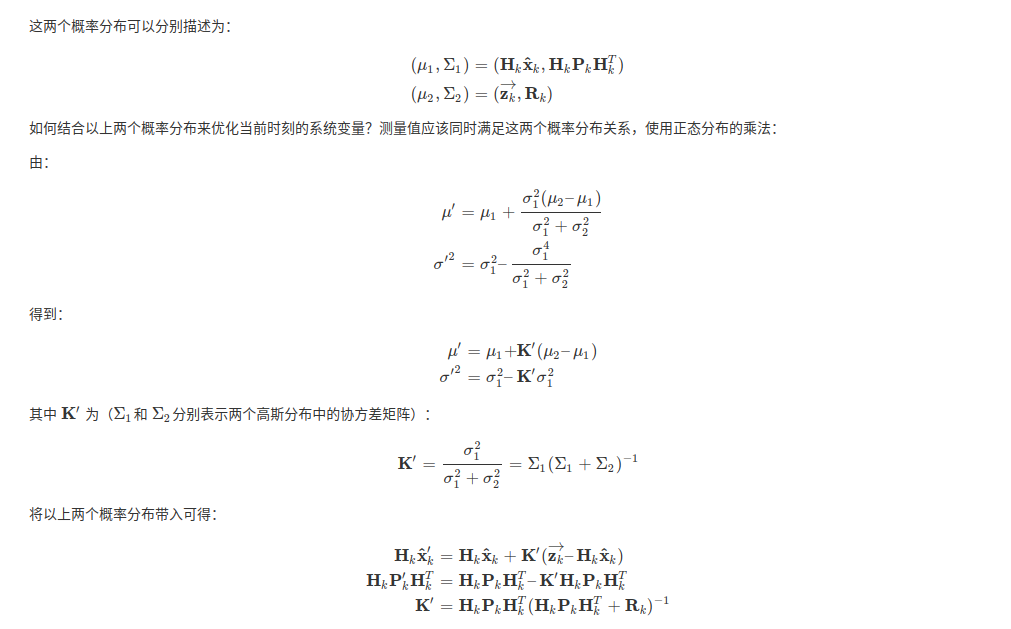
一般来说,EKF在对非线性函数做泰勒展开时,只取到一阶导和二阶导,而由于二阶导的计算复杂性,更多的实际应用只取到一阶导,同样也能有较好的结果。取一阶导时,状态转移方程和观测方程就近似为线性方程,高斯分布的变量经过线性变换之后仍然是高斯分布,这样就能够延用标准卡尔曼滤波的框架。

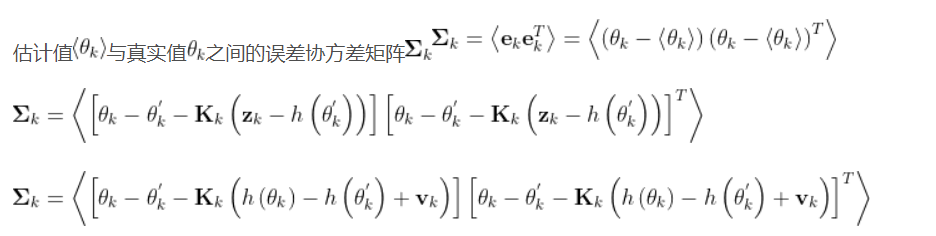
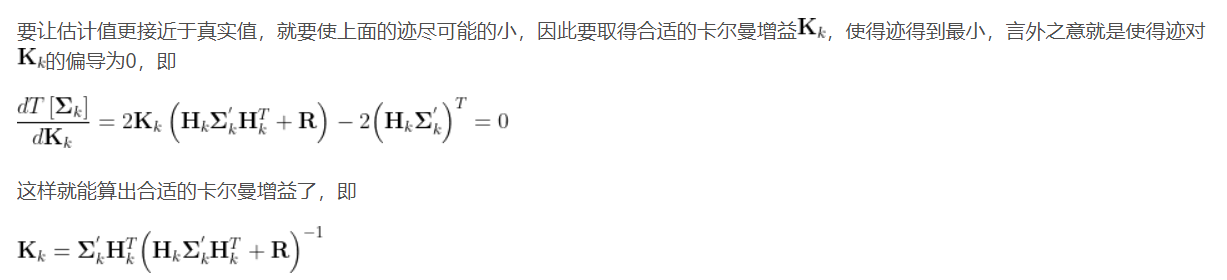
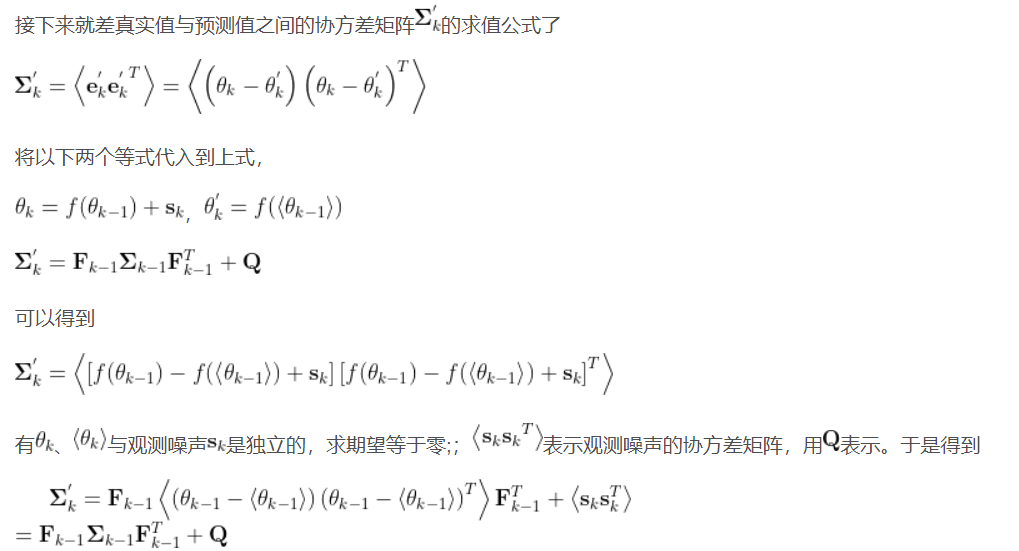
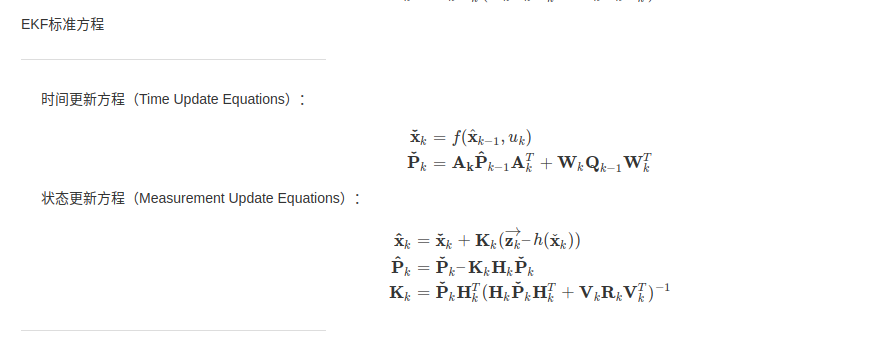
EKF
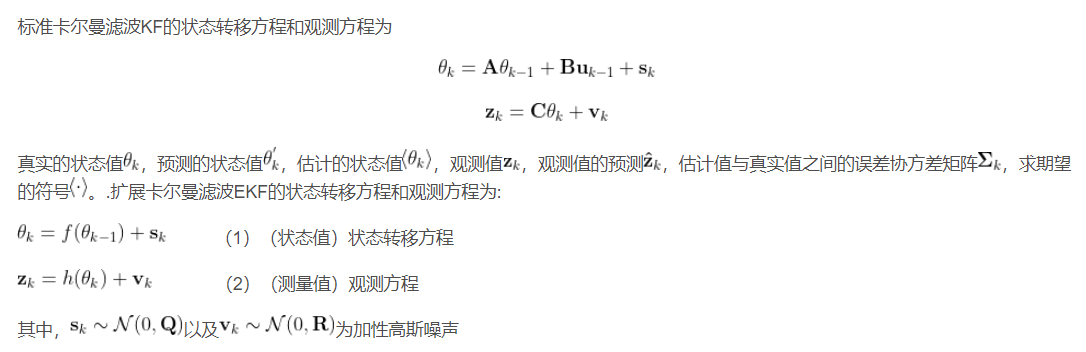



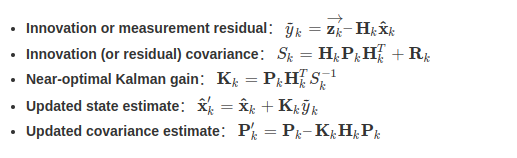
给出EKF的预测(Predict)和更新(Update)两个步骤:






https://slowlythinking.github.io/2019/07/Paper_Framework-EKF/



 浙公网安备 33010602011771号
浙公网安备 33010602011771号