
视觉VO(10-3-1)2D-3D 优化位姿和三维点- 重投影误差 原理篇

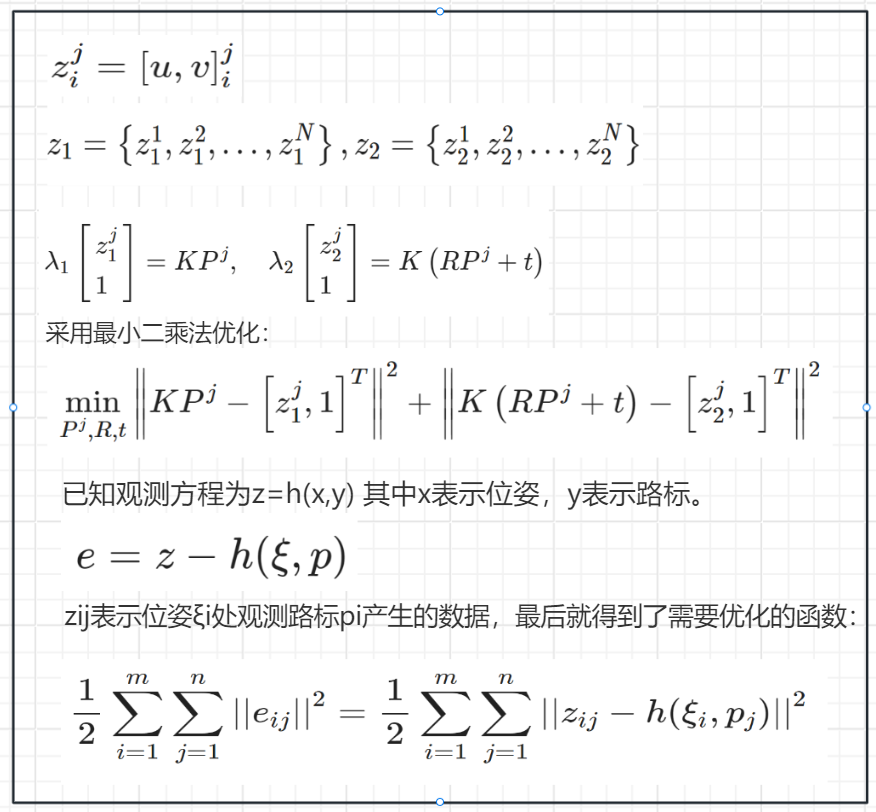
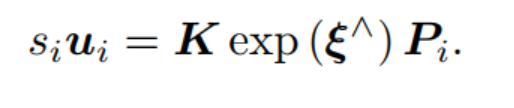
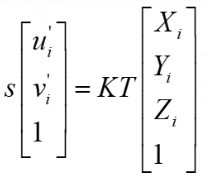
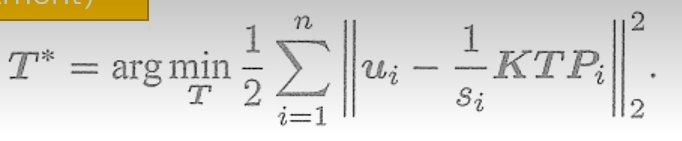
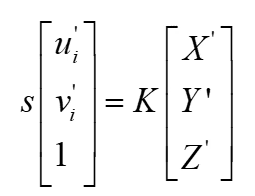
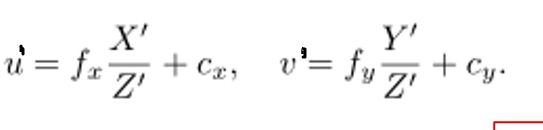
1 重投影方程
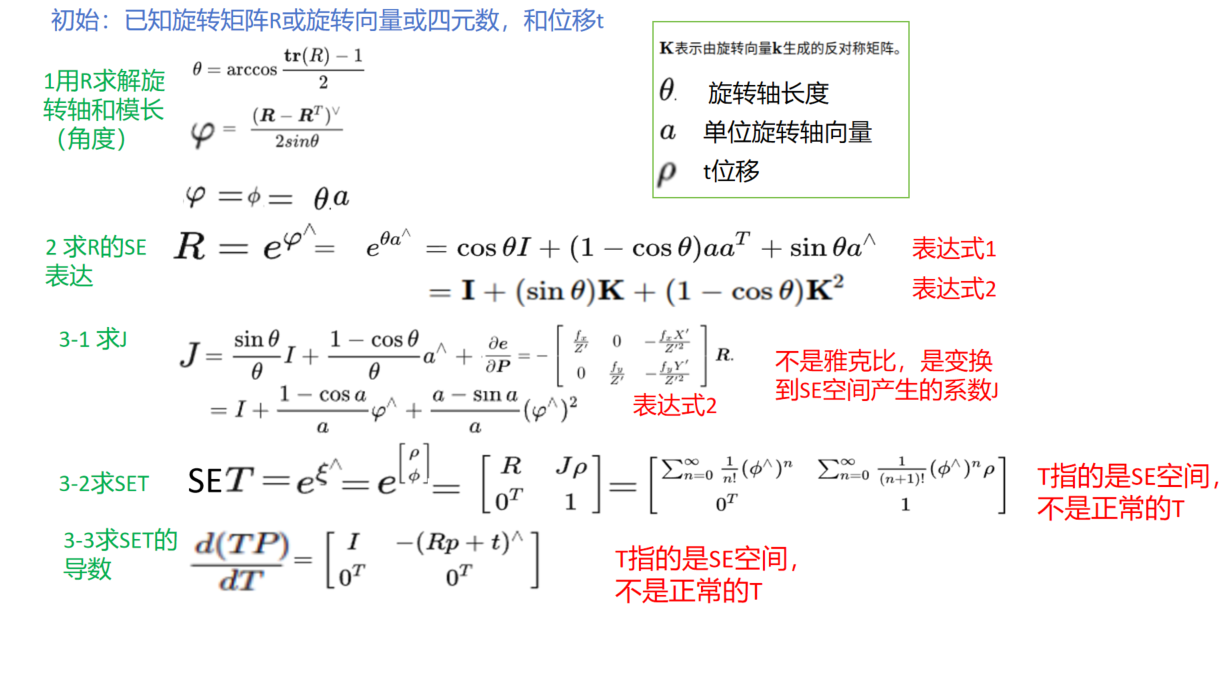
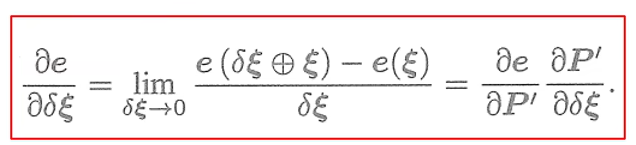
2 李代数表现形式 - 便于求导和减少约束条件
https://blog.csdn.net/weixin_49804978/article/details/121922128
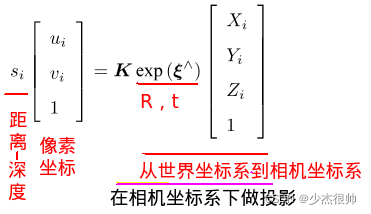
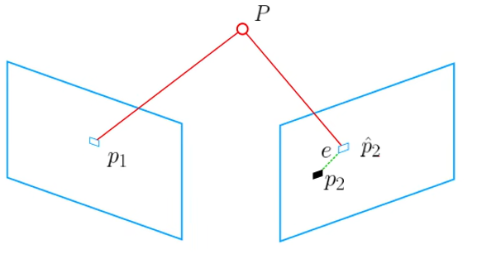
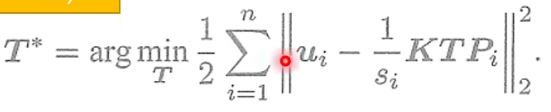
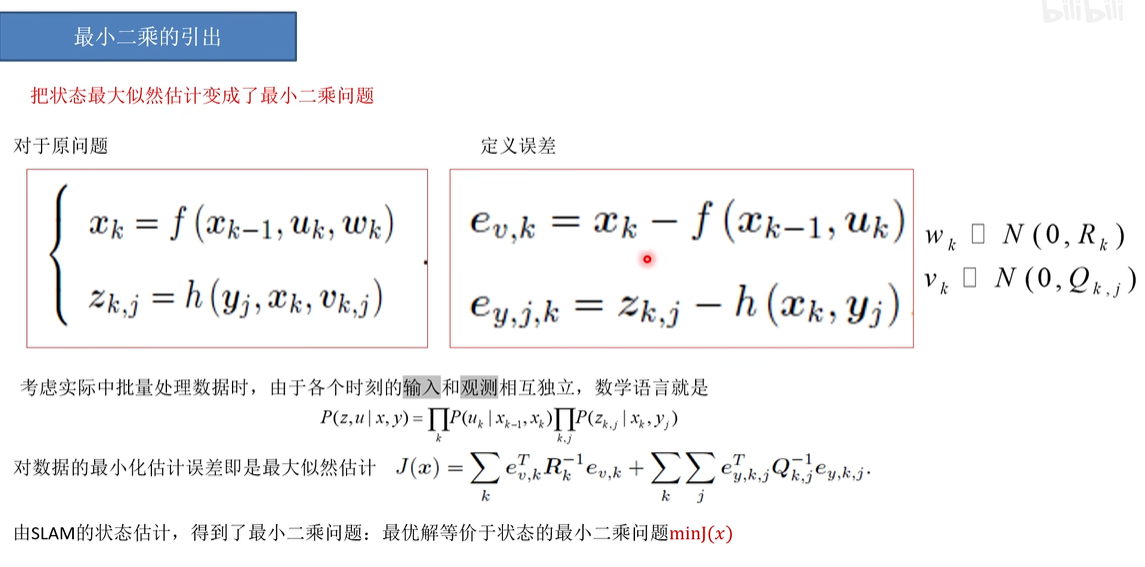
由于相机位姿未知以及观测点的噪声,该等式存在一个误差。我们将误差求和,构建最小二乘问题,然后寻找做好的相机位姿,使它最小化:
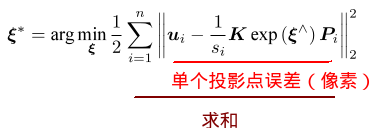
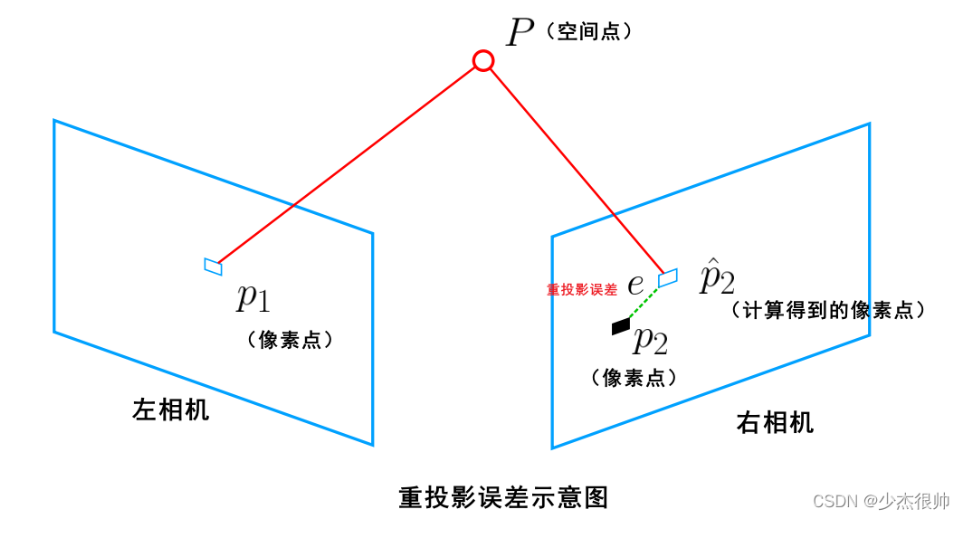
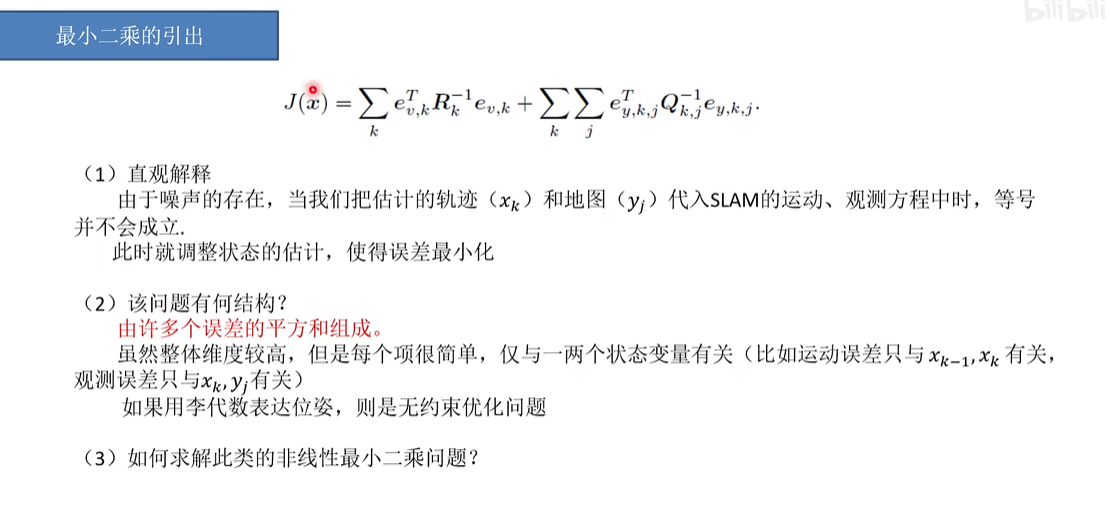
该问题的误差项,是将像素坐标(观测到的投影位置)与 3D 点按照当前估计的位姿进行投影得到的位置相比较得到的误差,所以称之为重投影误差。
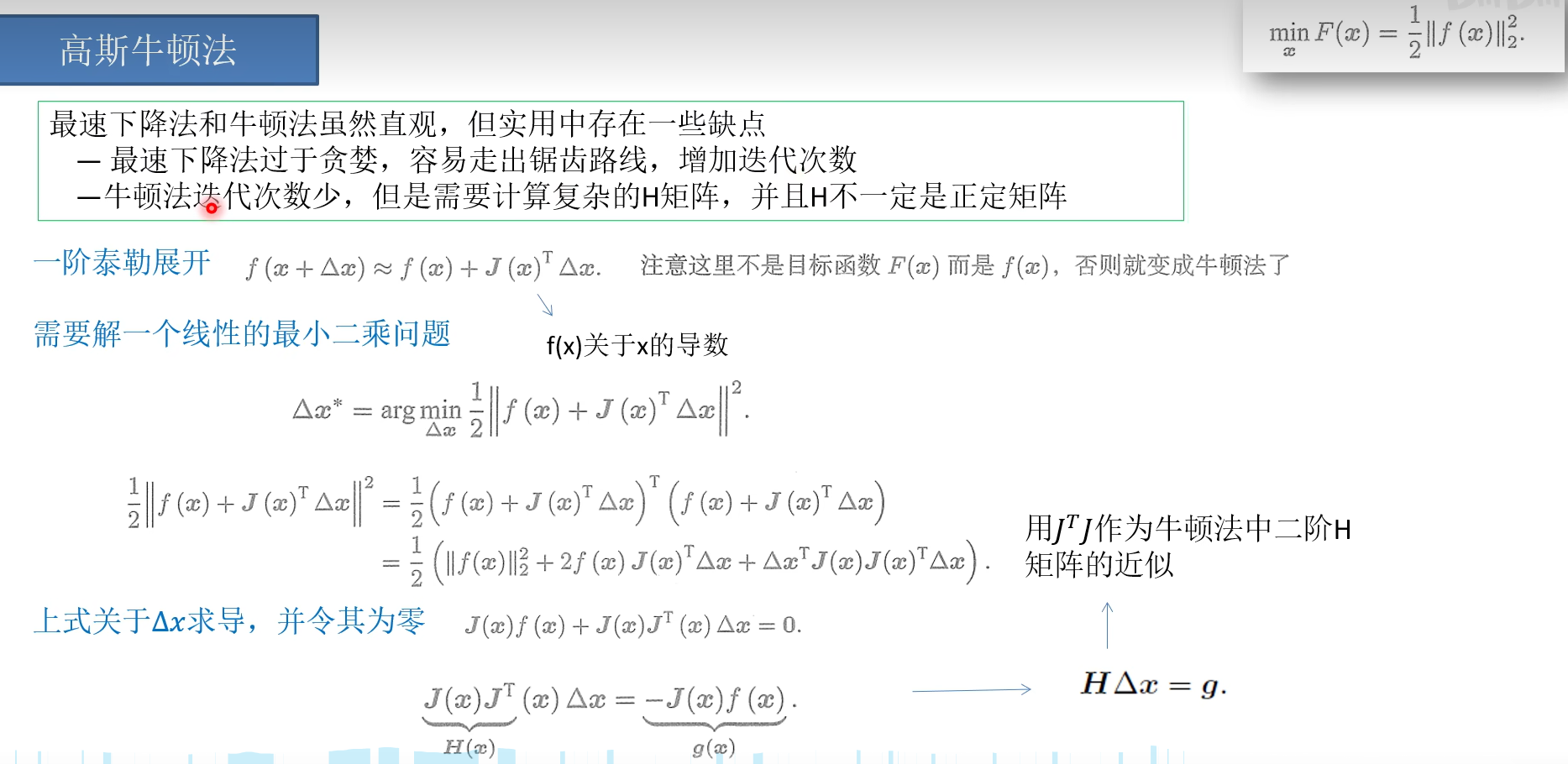
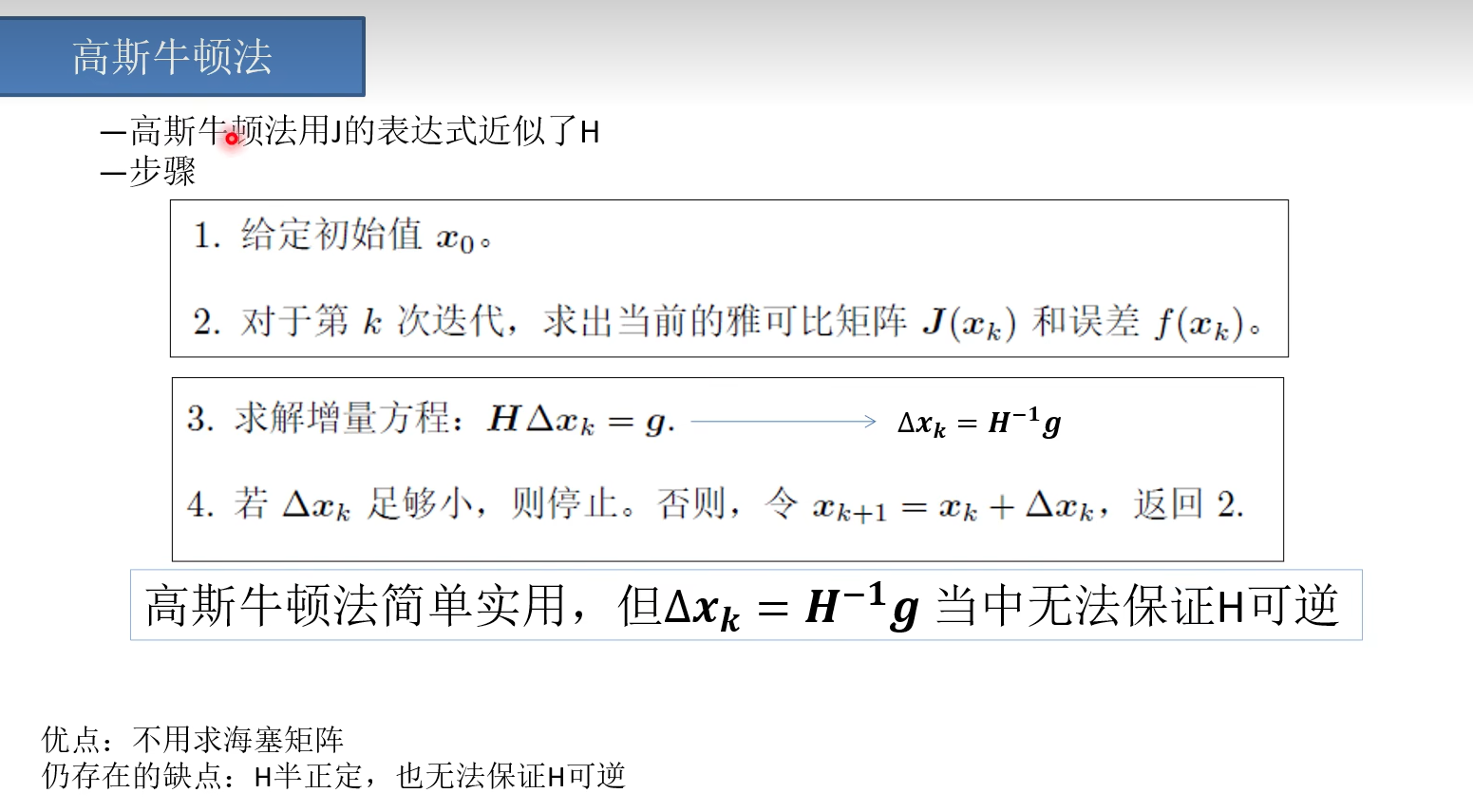
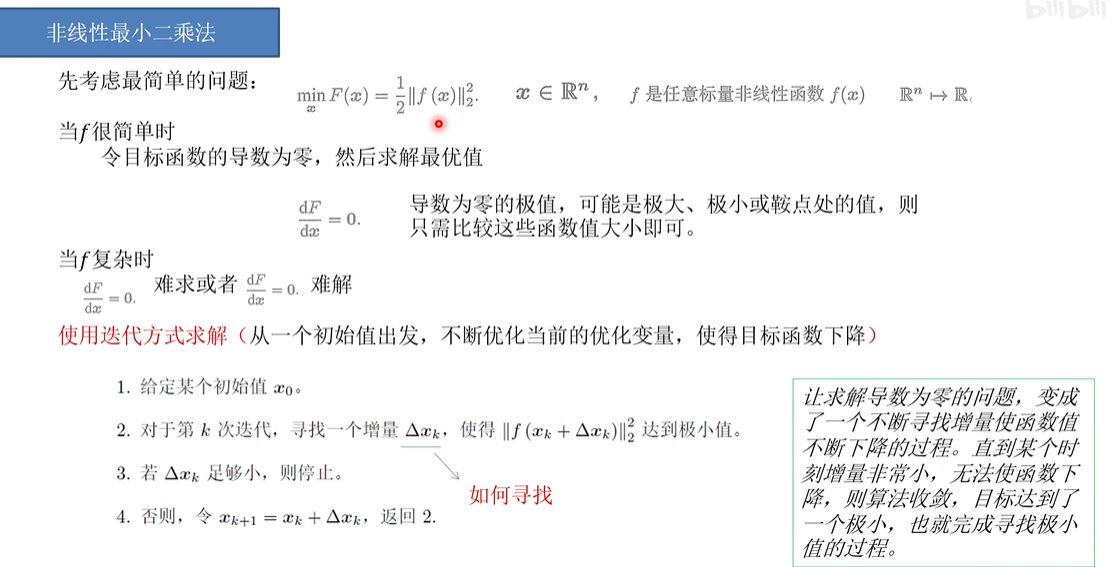
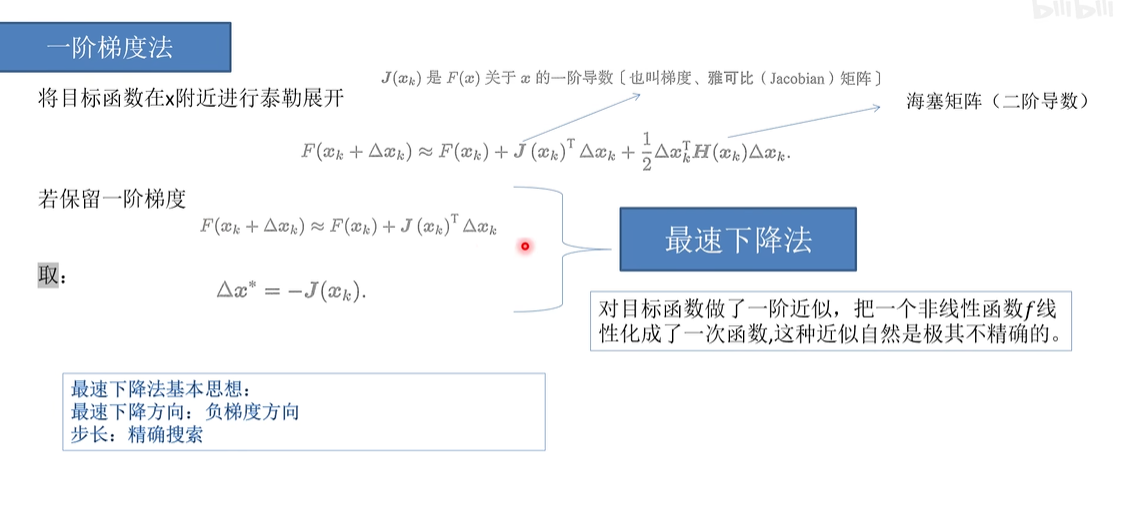
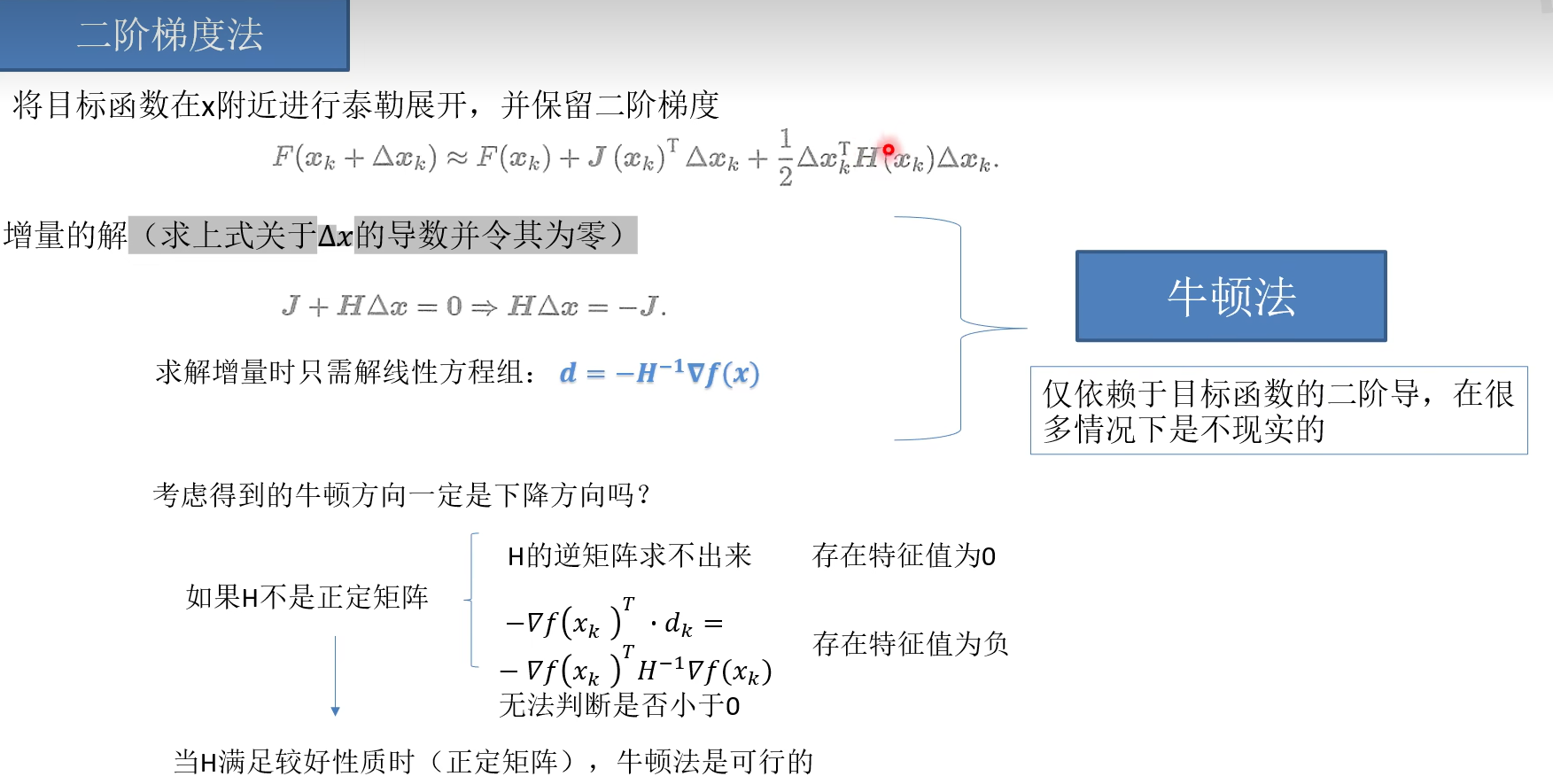
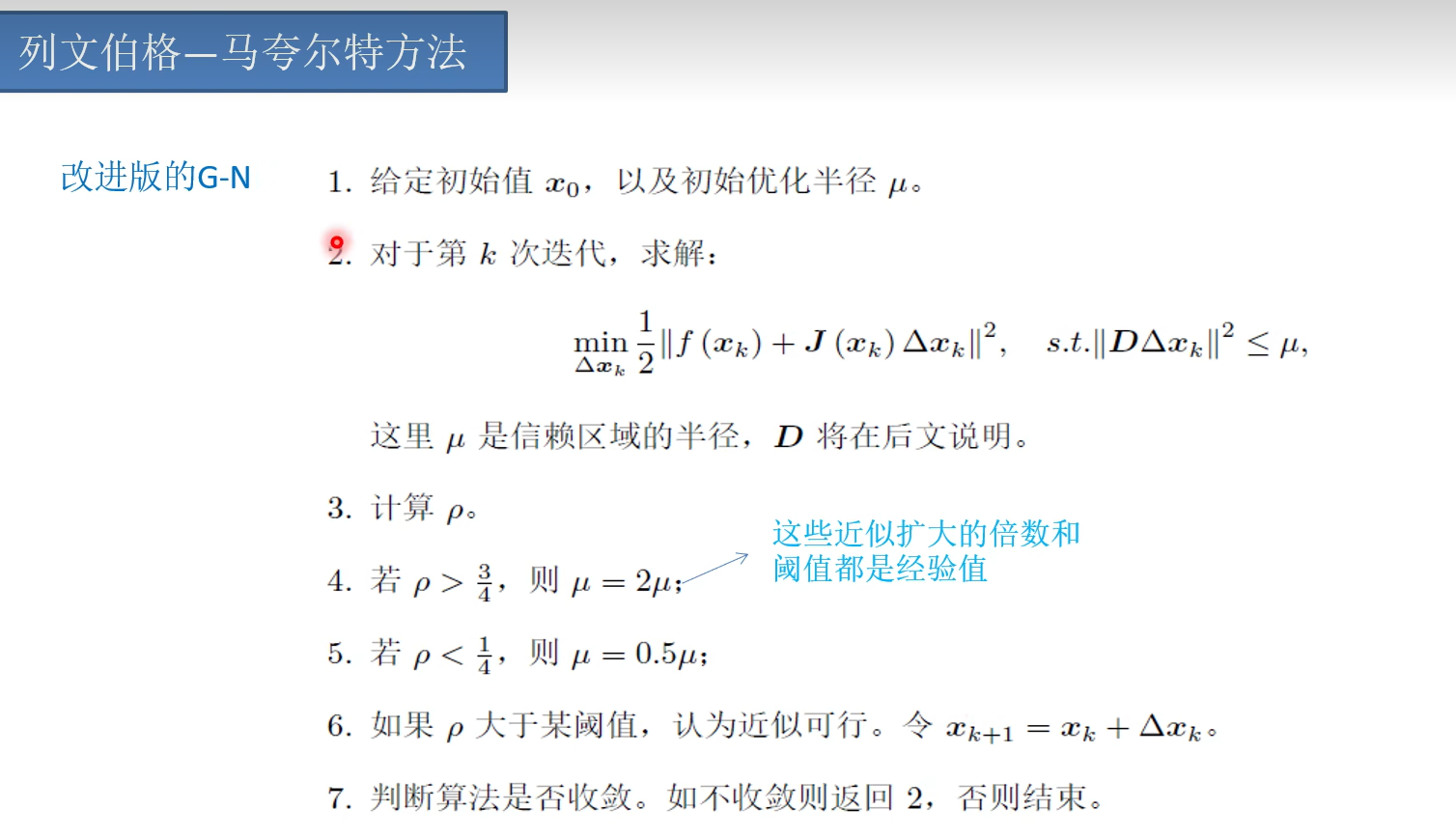
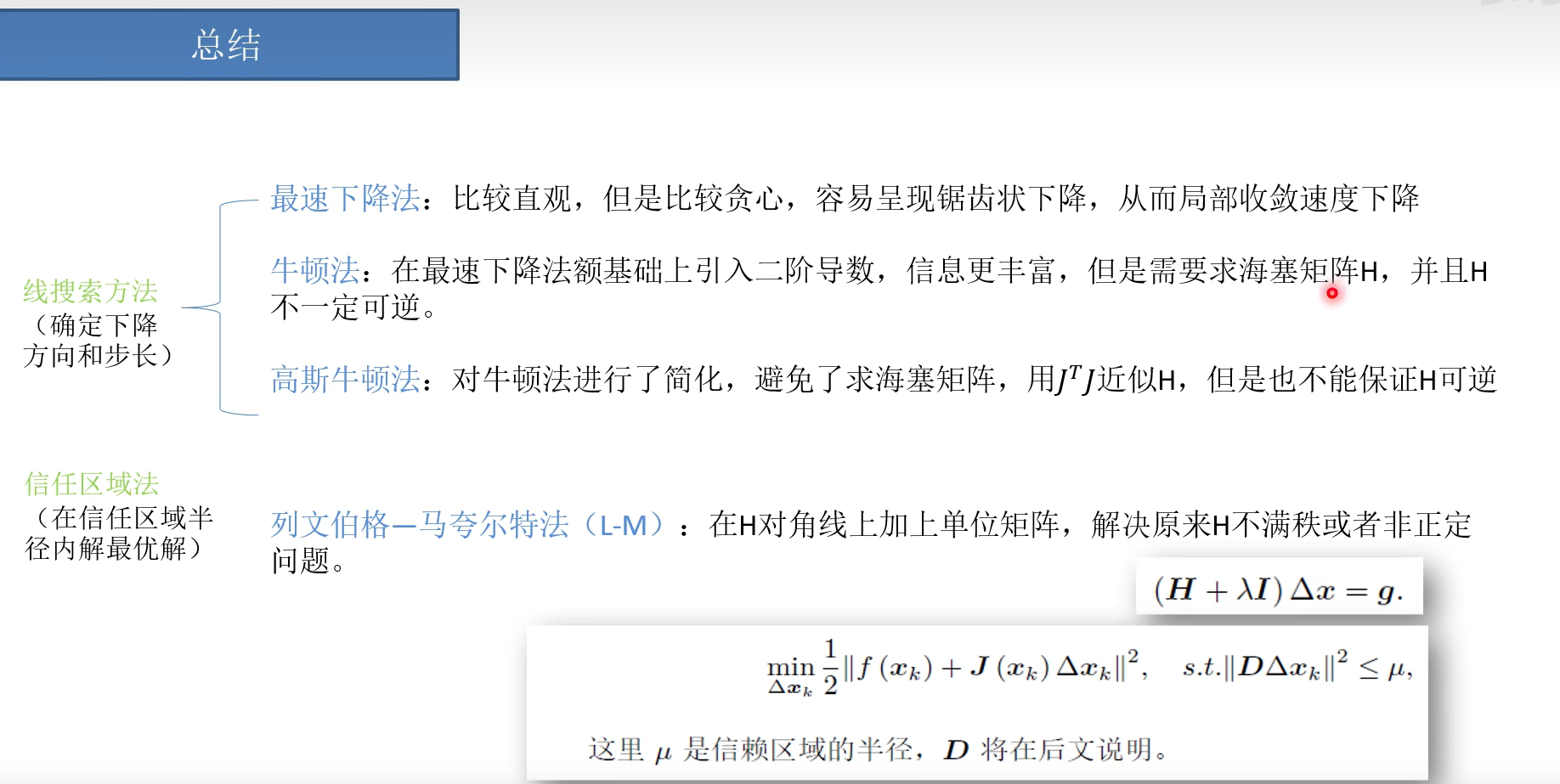
(用高斯牛顿法/列文伯格-马夸尔特方法求解)
3 误差方程求解
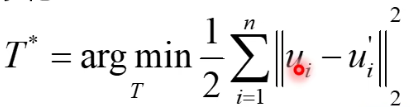
3-1 构造最小二乘解框架
高斯牛顿法举例
其中x 是位姿Rt 和 三维点xyz ,而非原来的 (u,v)观测值
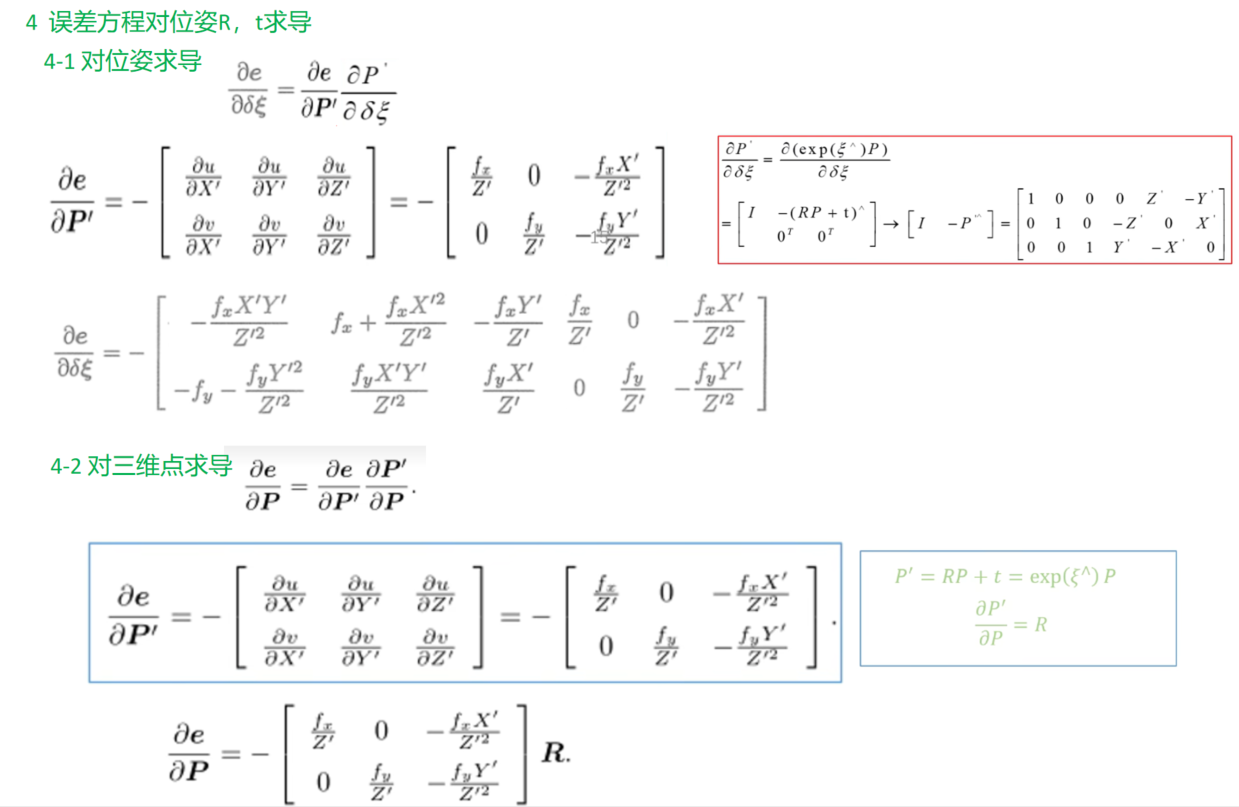
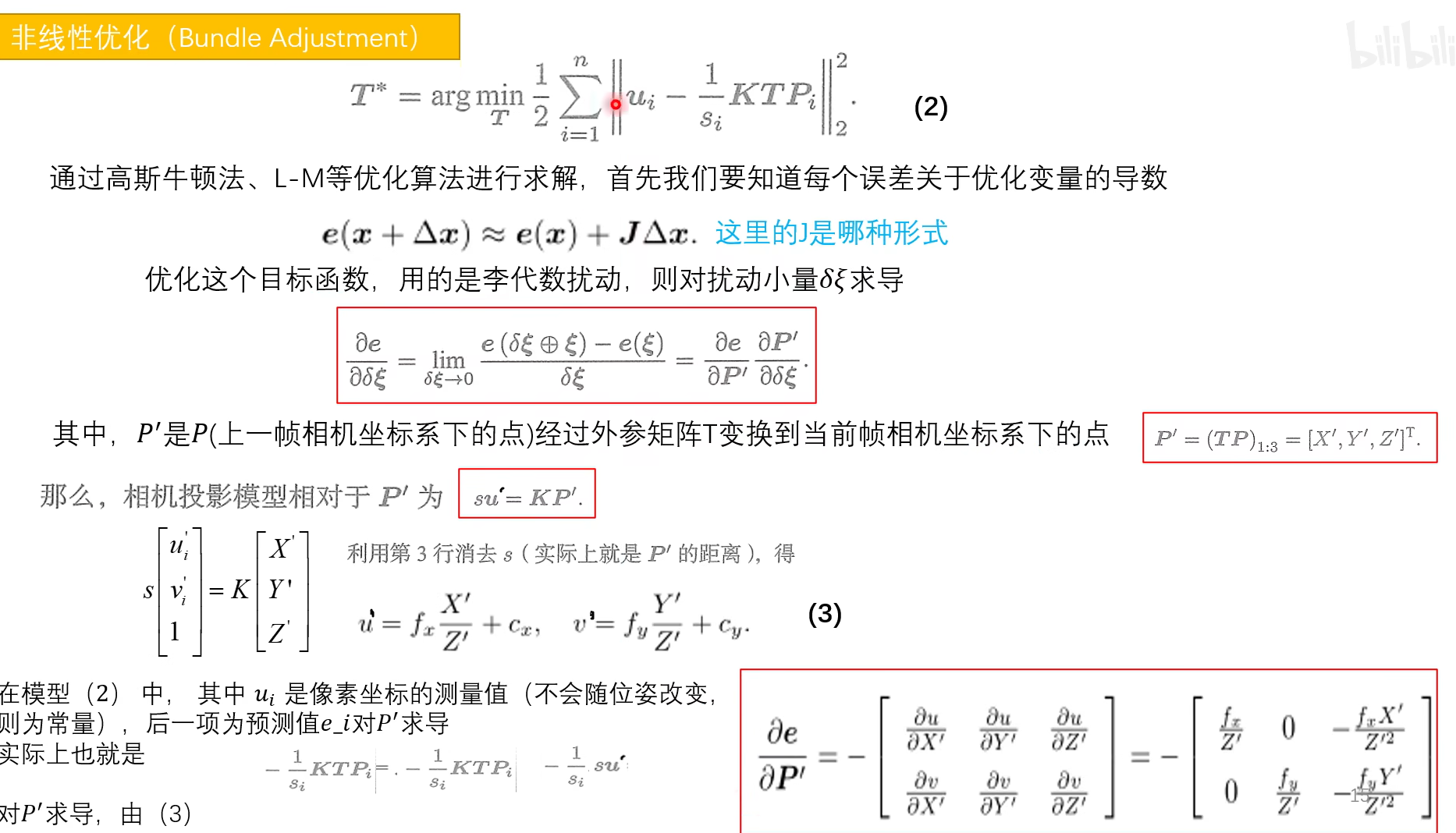
3-2 具体求解一阶雅可比方程
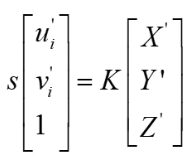
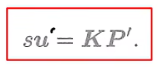
预测值
观测值
投影方程
三维点
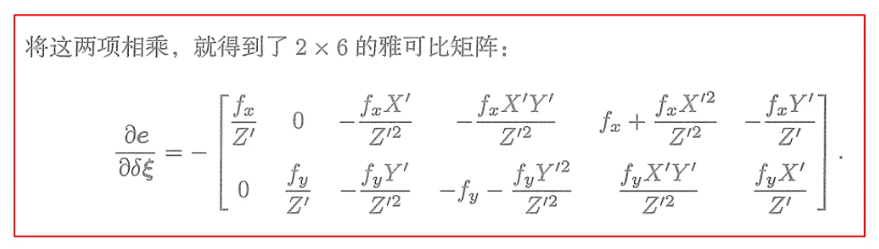
最终
1(u,v)对dT 求导
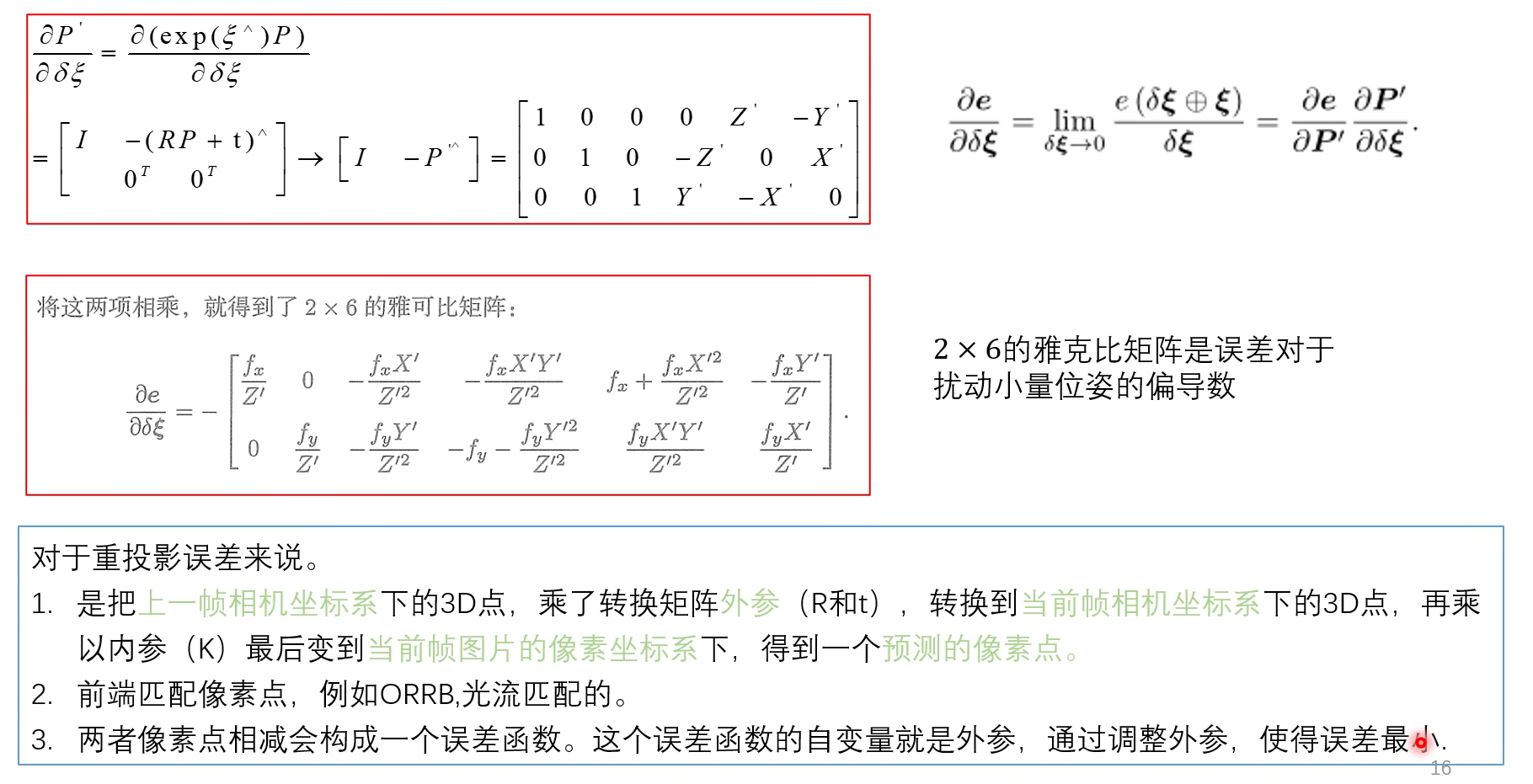
T被转化为扰动E 所以T分为两个部分
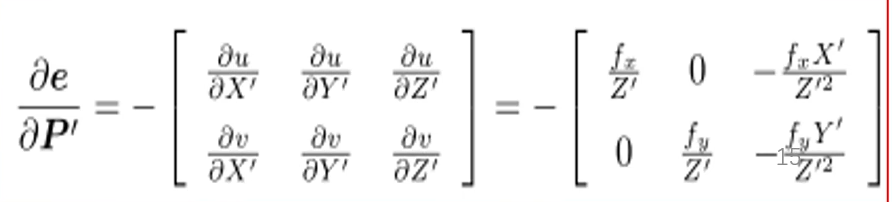
1 像素坐标(u,v)对 Rt求导
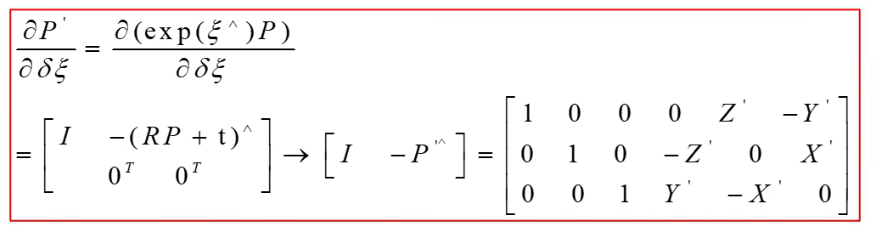
2 T对离地阿叔扰动dT求导
推导过程

第一项求导
第二项求导
跟新流程

 1*6维度 3维位姿 3为位置
1*6维度 3维位姿 3为位置
具体过程
1 Rt转化为dT
dT_1*6 = g2o::SE3Quat (R_3*3,t_1*3)
2初始值
_estimate = SE3Quat();
3设置值
pose->setEstimate (dT_1*6)

4每次跟新
1*6维度 3维位姿 3为位置
Eigen::Map<const Vector6> update(update_);
5转化
SE3Quat::exp(update)
6跟新
setEstimate(SE3Quat::exp(update)*estimate()); //更新方式
联合
实际代码 对应
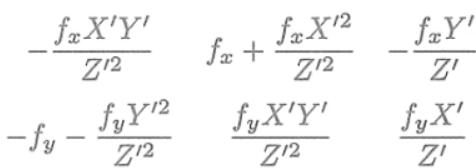

位姿一阶导数J代码
_jacobianOplusXj(0, 0) = x * y / z_2 * cam->focal_length; _jacobianOplusXj(0, 1) = -(1 + (x * x / z_2)) * cam->focal_length; _jacobianOplusXj(0, 2) = y / z * cam->focal_length; _jacobianOplusXj(0, 3) = -1. / z * cam->focal_length; _jacobianOplusXj(0, 4) = 0; _jacobianOplusXj(0, 5) = x / z_2 * cam->focal_length; _jacobianOplusXj(1, 0) = (1 + y * y / z_2) * cam->focal_length; _jacobianOplusXj(1, 1) = -x * y / z_2 * cam->focal_length; _jacobianOplusXj(1, 2) = -x / z * cam->focal_length; _jacobianOplusXj(1, 3) = 0; _jacobianOplusXj(1, 4) = -1. / z * cam->focal_length; _jacobianOplusXj(1, 5) = y / z_2 * cam->focal_length;
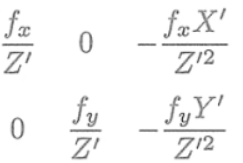
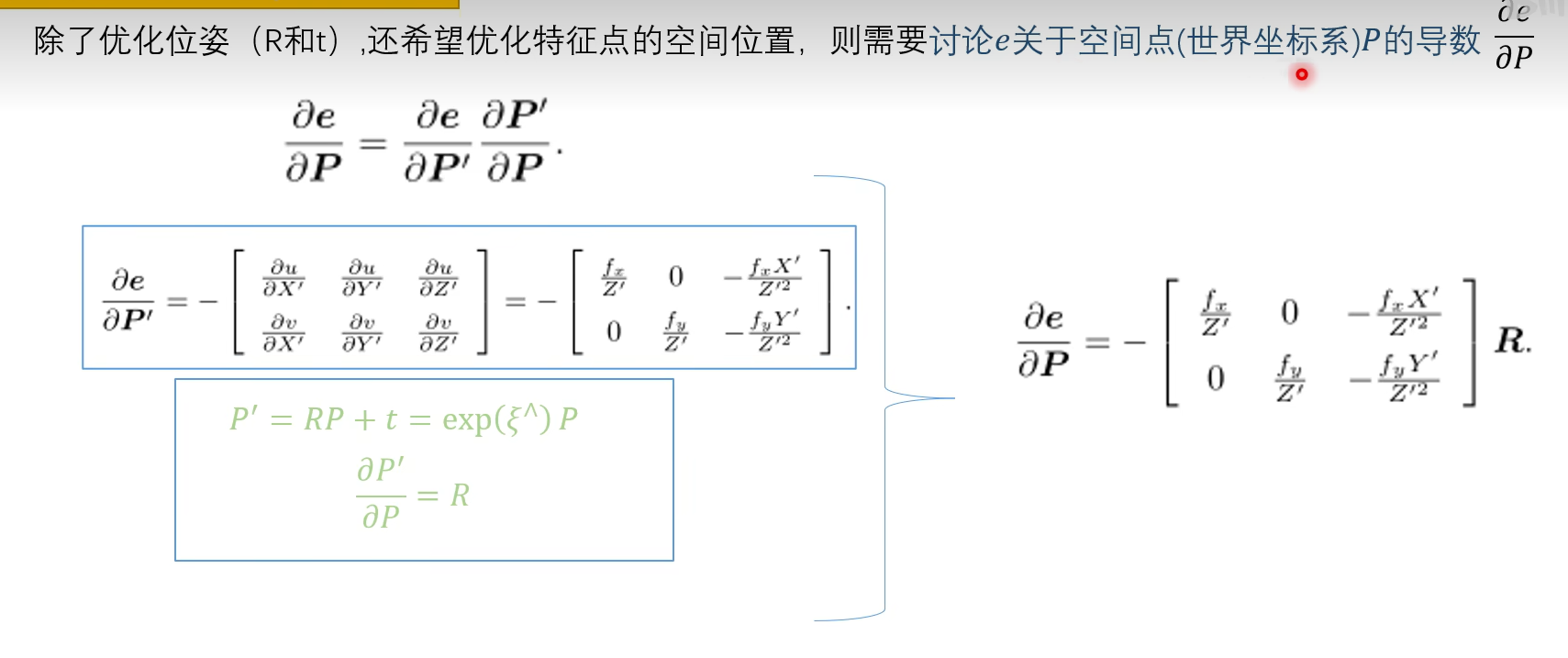
对空间点求导
三维点一阶导数J代码
Eigen::Matrix<double, 2, 3, Eigen::ColMajor> tmp; tmp(0, 0) = cam->focal_length; tmp(0, 1) = 0; tmp(0, 2) = -x / z * cam->focal_length; tmp(1, 0) = 0; tmp(1, 1) = cam->focal_length; tmp(1, 2) = -y / z * cam->focal_length; _jacobianOplusXi = -1. / z * tmp * T.rotation().toRotationMatrix();
位姿和三维点联合在一个边中代码
edge_project_xyz2uv.cpp
// g2o - General Graph Optimization
#include "edge_project_xyz2uv.h"
namespace g2o {
EdgeProjectXYZ2UV::EdgeProjectXYZ2UV()
: BaseBinaryEdge<2, Vector2, VertexPointXYZ, VertexSE3Expmap>() {
_cam = 0;
resizeParameters(1);
installParameter(_cam, 0);
}
bool EdgeProjectXYZ2UV::read(std::istream& is) {
readParamIds(is);
internal::readVector(is, _measurement);
return readInformationMatrix(is);
}
bool EdgeProjectXYZ2UV::write(std::ostream& os) const {
writeParamIds(os);
internal::writeVector(os, measurement());
return writeInformationMatrix(os);
}
void EdgeProjectXYZ2UV::computeError() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[1]);
const VertexPointXYZ* v2 = static_cast<const VertexPointXYZ*>(_vertices[0]);
const CameraParameters* cam =
static_cast<const CameraParameters*>(parameter(0));
_error = measurement() - cam->cam_map(v1->estimate().map(v2->estimate()));
}
void EdgeProjectXYZ2UV::linearizeOplus() {
VertexSE3Expmap* vj = static_cast<VertexSE3Expmap*>(_vertices[1]);
SE3Quat T(vj->estimate());
VertexPointXYZ* vi = static_cast<VertexPointXYZ*>(_vertices[0]);
Vector3 xyz = vi->estimate();
Vector3 xyz_trans = T.map(xyz);
double x = xyz_trans[0];
double y = xyz_trans[1];
double z = xyz_trans[2];
double z_2 = z * z;
const CameraParameters* cam =
static_cast<const CameraParameters*>(parameter(0));
Eigen::Matrix<double, 2, 3, Eigen::ColMajor> tmp;
tmp(0, 0) = cam->focal_length;
tmp(0, 1) = 0;
tmp(0, 2) = -x / z * cam->focal_length;
tmp(1, 0) = 0;
tmp(1, 1) = cam->focal_length;
tmp(1, 2) = -y / z * cam->focal_length;
_jacobianOplusXi = -1. / z * tmp * T.rotation().toRotationMatrix();
_jacobianOplusXj(0, 0) = x * y / z_2 * cam->focal_length;
_jacobianOplusXj(0, 1) = -(1 + (x * x / z_2)) * cam->focal_length;
_jacobianOplusXj(0, 2) = y / z * cam->focal_length;
_jacobianOplusXj(0, 3) = -1. / z * cam->focal_length;
_jacobianOplusXj(0, 4) = 0;
_jacobianOplusXj(0, 5) = x / z_2 * cam->focal_length;
_jacobianOplusXj(1, 0) = (1 + y * y / z_2) * cam->focal_length;
_jacobianOplusXj(1, 1) = -x * y / z_2 * cam->focal_length;
_jacobianOplusXj(1, 2) = -x / z * cam->focal_length;
_jacobianOplusXj(1, 3) = 0;
_jacobianOplusXj(1, 4) = -1. / z * cam->focal_length;
_jacobianOplusXj(1, 5) = y / z_2 * cam->focal_length;
}
} // namespace g2o
具体推导
https://www.bilibili.com/video/BV1ue4y1R7Ei/?spm_id_from=333.788&vd_source=f88ed35500cb30c7be9bbe418a5998ca

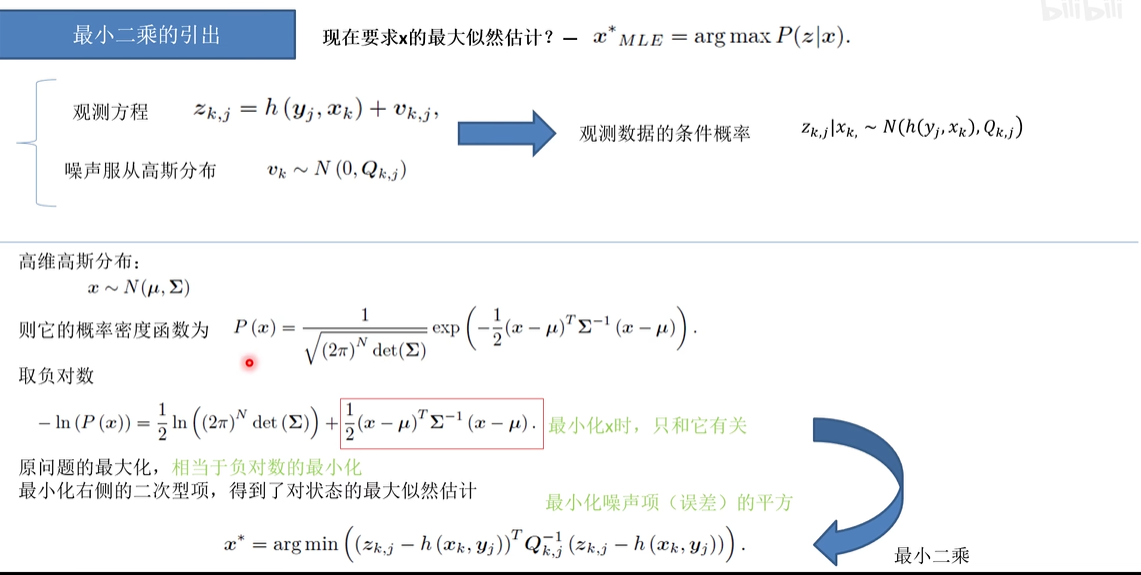
理论基础
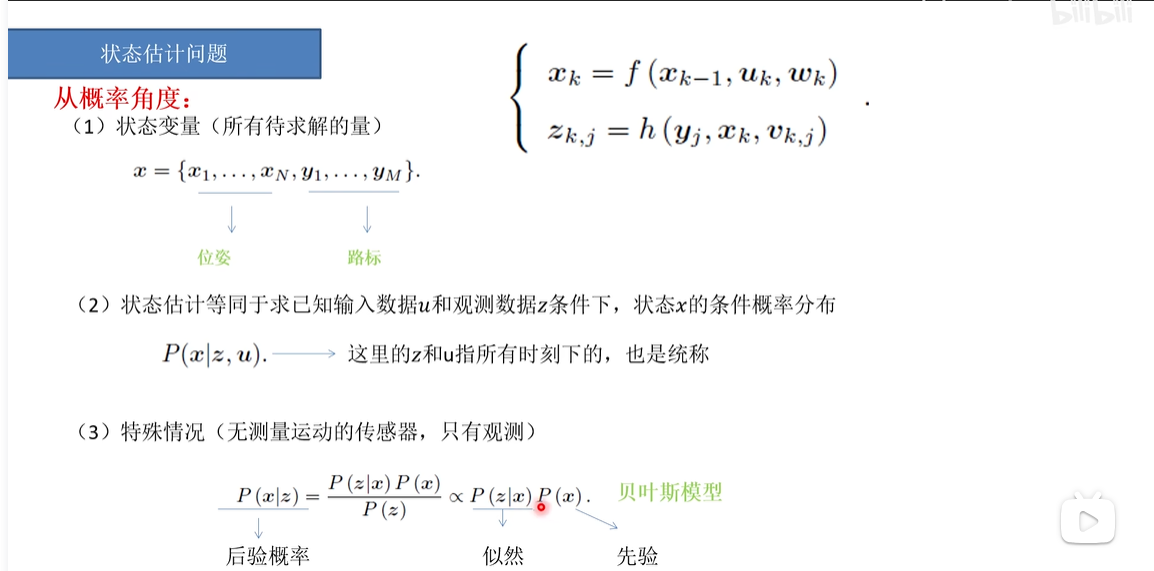
理论引出最小二乘
知道观测结果,反推像素坐标和三维点坐标状态,反推的结果更新现有的结果,从而完成了优化。


重投影误差
https://i.cnblogs.com/posts/edit;postId=17832164

整理
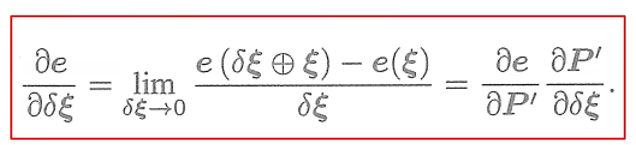
对当前点P'求导Rt-T-对应李代数E
误差是(u,v)对T求导,T对AT求导 的

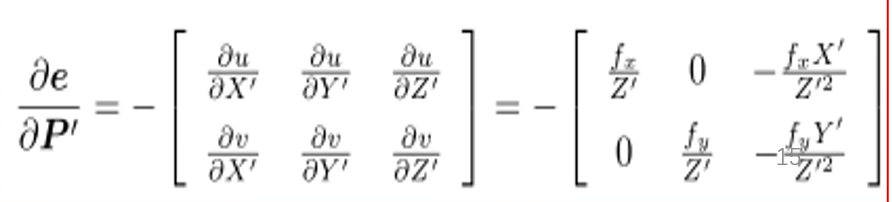
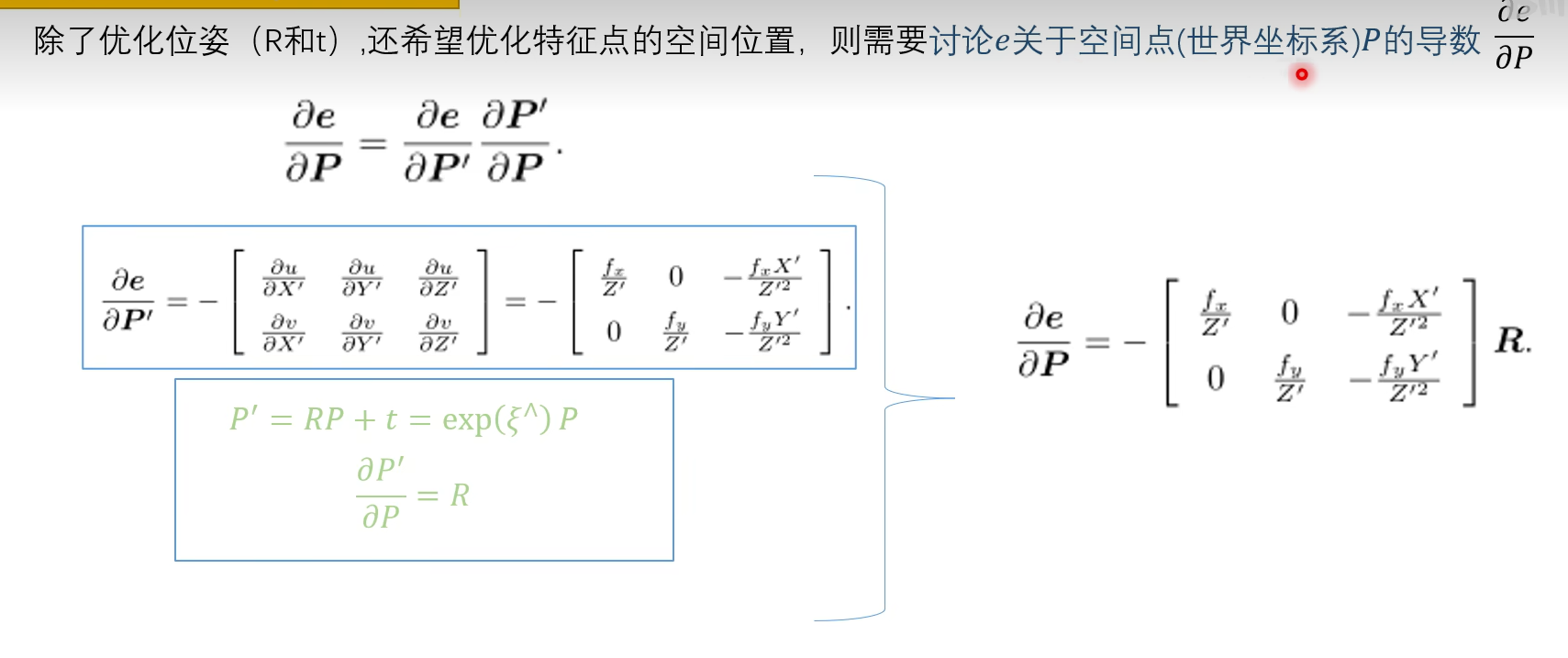
误差E (u,v)对P(x,y,z)求导
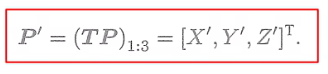
P'关于Rt的位姿

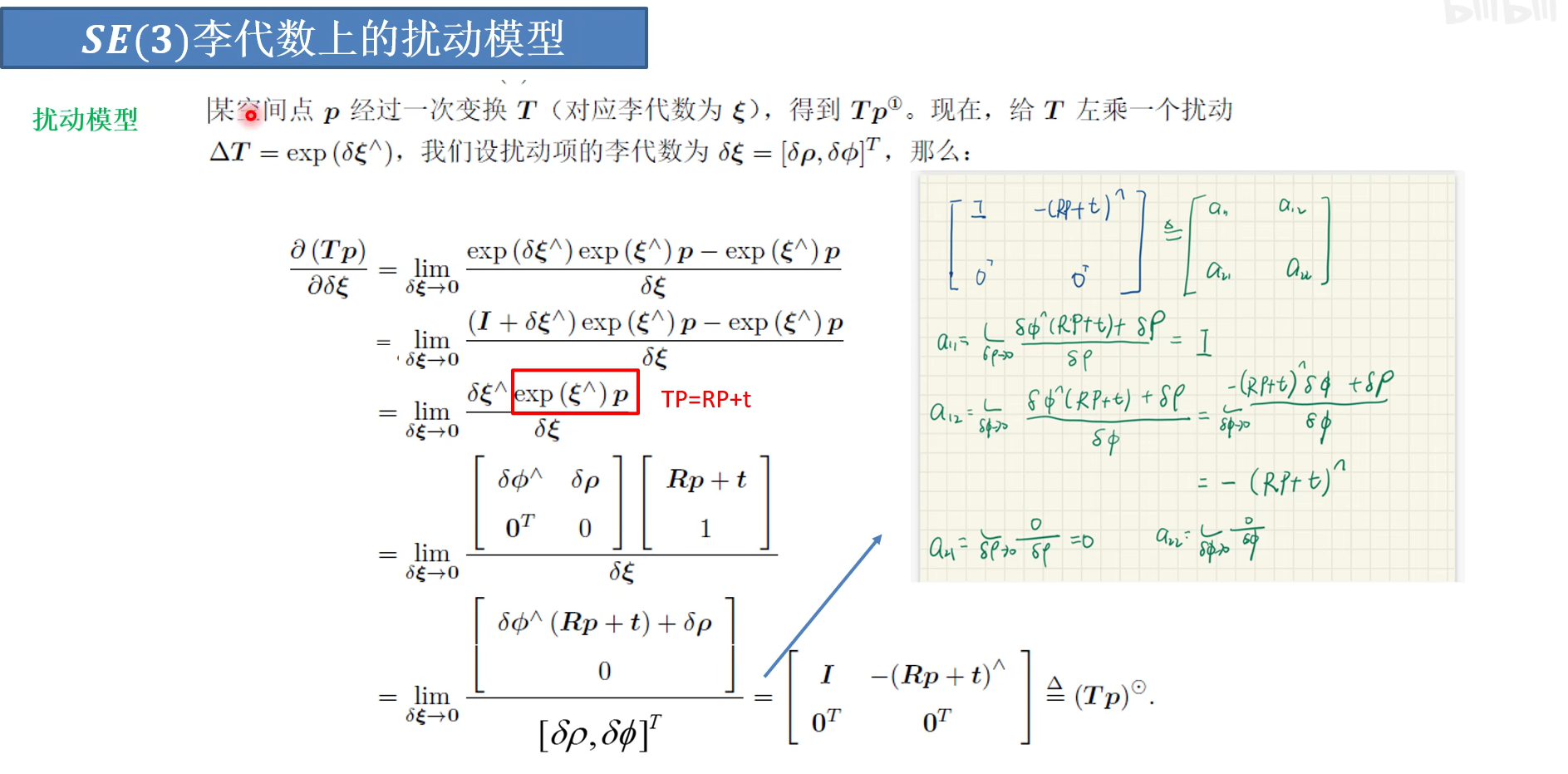
P'对Rt求导 李代数
推导
自己的手工推导
https://www.cnblogs.com/gooutlook/p/16412222.html
B站PPT
https://www.bilibili.com/video/BV1LT411V7zv/?spm_id_from=333.788&vd_source=f88ed35500cb30c7be9bbe418a5998ca



 浙公网安备 33010602011771号
浙公网安备 33010602011771号