
视觉VO(9-2)共视图和本质图
https://zhuanlan.zhihu.com/p/595837772
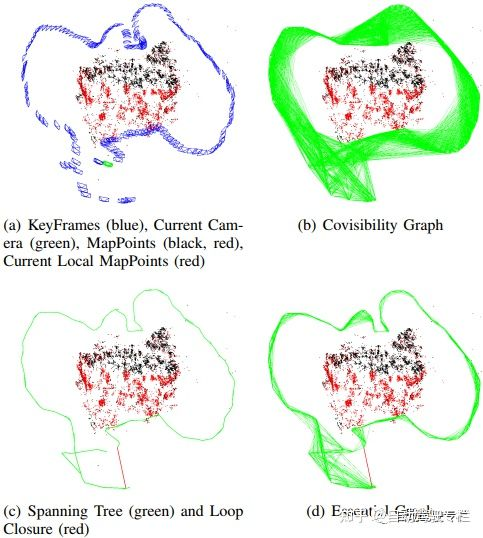
所有相连关键帧组成共视图。
关键帧之间的共视信息在本文系统的若干个任务中非常有用,并且其被表示为一种无向加权图。图中每一节点为一个关键帧,如果两个关键帧之间共享相同地图点(至少15个)观测,则这两个关键帧之间存在一条边,该边的权重为共视地图点的数量。
为了纠正回环,我们执行位姿图优化,它将回环误差均摊到图中。
为了不包括共视图中提供的所有边(不然整个图会非常稠密),我们提出构建一个本质图,该图中保留所有的节点(关键帧)但是更少的边,它仍然保留了一个产生精确结果的强大网络。
该系统从初始的关键帧开始增量式地构建生成树,这提供了具有最少数量边的共视图的连接子图。
当一个新的关键帧被插入时,它被包含到生成树中且与共享地图点观测最多的那个关键帧连接,并且当一个关键帧通过筛选策略剔除时,系统将更新受那个关键帧影响的连接关系。
本质图包含了生成树、共视图中具有高度共视关系(边>100)的边的集合以及回环边,从而产生一个强大的相机网络。
下图展示了一个共视图、生成树和与之关联的本质图的例子。
如后文实验所示,当执行位姿图优化时,所得结果非常精确以至于额外的全局BA优化很难再提高结果精度。
本质图的效率和边的最小阈值的影响将在实验部分介绍。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号