

struct F4 {
template <typename T>
bool operator()(const T* const x1, const T* const x4, T* residual) const {
// f4 = sqrt(10) (x1 - x4)^2
residual[0] = sqrt(10.0) * (x1[0] - x4[0]) * (x1[0] - x4[0]);
return true;
}
};
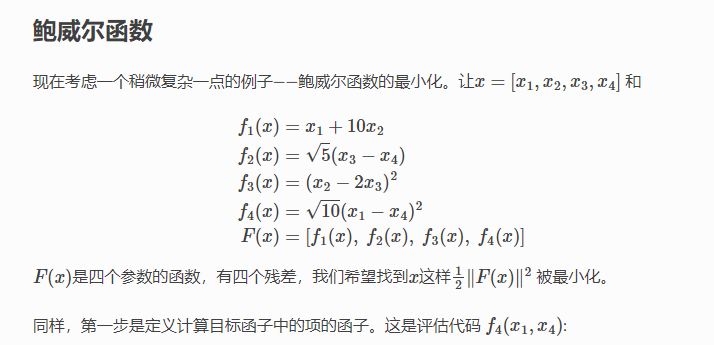
同样,我们可以定义类F1,F2并F3评估 f1(x1,x2),f2(x3,x4)和f3(x2,x3) 分别。
struct F1 {
template <typename T>
bool operator()(const T* const x1, const T* const x2, T* residual) const {
// f1 = x1 + 10 * x2;
residual[0] = x1[0] + 10.0 * x2[0];
return true;
}
};
struct F2 {
template <typename T>
bool operator()(const T* const x3, const T* const x4, T* residual) const {
// f2 = sqrt(5) (x3 - x4)
residual[0] = sqrt(5.0) * (x3[0] - x4[0]);
return true;
}
};
struct F3 {
template <typename T>
bool operator()(const T* const x2, const T* const x3, T* residual) const {
// f3 = (x2 - 2 x3)^2
residual[0] = (x2[0] - 2.0 * x3[0]) * (x2[0] - 2.0 * x3[0]);
return true;
}
};
struct F4 {
template <typename T>
bool operator()(const T* const x1, const T* const x4, T* residual) const {
// f4 = sqrt(10) (x1 - x4)^2
residual[0] = sqrt(10.0) * (x1[0] - x4[0]) * (x1[0] - x4[0]);
return true;
}
};
使用这些,问题可以构造如下:
double x1 = 3.0; double x2 = -1.0; double x3 = 0.0; double x4 = 1.0; Problem problem; // Add residual terms to the problem using the autodiff // wrapper to get the derivatives automatically. problem.AddResidualBlock( new AutoDiffCostFunction<F1, 1, 1, 1>(new F1), nullptr, &x1, &x2); problem.AddResidualBlock( new AutoDiffCostFunction<F2, 1, 1, 1>(new F2), nullptr, &x3, &x4); problem.AddResidualBlock( new AutoDiffCostFunction<F3, 1, 1, 1>(new F3), nullptr, &x2, &x3); problem.AddResidualBlock( new AutoDiffCostFunction<F4, 1, 1, 1>(new F4), nullptr, &x1, &x4);
请注意,每个ResidualBlock仅取决于相应残差对象所依赖的两个参数,而不是所有四个参数。编译和运行examples/powell.cc 给我们:
Initial x1 = 3, x2 = -1, x3 = 0, x4 = 1
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 1.075000e+02 0.00e+00 1.55e+02 0.00e+00 0.00e+00 1.00e+04 0 4.95e-04 2.30e-03
1 5.036190e+00 1.02e+02 2.00e+01 2.16e+00 9.53e-01 3.00e+04 1 4.39e-05 2.40e-03
2 3.148168e-01 4.72e+00 2.50e+00 6.23e-01 9.37e-01 9.00e+04 1 9.06e-06 2.43e-03
3 1.967760e-02 2.95e-01 3.13e-01 3.08e-01 9.37e-01 2.70e+05 1 8.11e-06 2.45e-03
4 1.229900e-03 1.84e-02 3.91e-02 1.54e-01 9.37e-01 8.10e+05 1 6.91e-06 2.48e-03
5 7.687123e-05 1.15e-03 4.89e-03 7.69e-02 9.37e-01 2.43e+06 1 7.87e-06 2.50e-03
6 4.804625e-06 7.21e-05 6.11e-04 3.85e-02 9.37e-01 7.29e+06 1 5.96e-06 2.52e-03
7 3.003028e-07 4.50e-06 7.64e-05 1.92e-02 9.37e-01 2.19e+07 1 5.96e-06 2.55e-03
8 1.877006e-08 2.82e-07 9.54e-06 9.62e-03 9.37e-01 6.56e+07 1 5.96e-06 2.57e-03
9 1.173223e-09 1.76e-08 1.19e-06 4.81e-03 9.37e-01 1.97e+08 1 7.87e-06 2.60e-03
10 7.333425e-11 1.10e-09 1.49e-07 2.40e-03 9.37e-01 5.90e+08 1 6.20e-06 2.63e-03
11 4.584044e-12 6.88e-11 1.86e-08 1.20e-03 9.37e-01 1.77e+09 1 6.91e-06 2.65e-03
12 2.865573e-13 4.30e-12 2.33e-09 6.02e-04 9.37e-01 5.31e+09 1 5.96e-06 2.67e-03
13 1.791438e-14 2.69e-13 2.91e-10 3.01e-04 9.37e-01 1.59e+10 1 7.15e-06 2.69e-03
Ceres Solver v1.12.0 Solve Report
----------------------------------
Original Reduced
Parameter blocks 4 4
Parameters 4 4
Residual blocks 4 4
Residual 4 4
Minimizer TRUST_REGION
Dense linear algebra library EIGEN
Trust region strategy LEVENBERG_MARQUARDT
Given Used
Linear solver DENSE_QR DENSE_QR
Threads 1 1
Linear solver threads 1 1
Cost:
Initial 1.075000e+02
Final 1.791438e-14
Change 1.075000e+02
Minimizer iterations 14
Successful steps 14
Unsuccessful steps 0
Time (in seconds):
Preprocessor 0.002
Residual evaluation 0.000
Jacobian evaluation 0.000
Linear solver 0.000
Minimizer 0.001
Postprocessor 0.000
Total 0.005
Termination: CONVERGENCE (Gradient tolerance reached. Gradient max norm: 3.642190e-11 <= 1.000000e-10)
Final x1 = 0.000292189, x2 = -2.92189e-05, x3 = 4.79511e-05, x4 = 4.79511e-05

//
// An example program that minimizes Powell's singular function.
//
// F = 1/2 (f1^2 + f2^2 + f3^2 + f4^2)
//
// f1 = x1 + 10*x2;
// f2 = sqrt(5) * (x3 - x4)
// f3 = (x2 - 2*x3)^2
// f4 = sqrt(10) * (x1 - x4)^2
//
// The starting values are x1 = 3, x2 = -1, x3 = 0, x4 = 1.
// The minimum is 0 at (x1, x2, x3, x4) = 0.
//
// From: Testing Unconstrained Optimization Software by Jorge J. More, Burton S.
// Garbow and Kenneth E. Hillstrom in ACM Transactions on Mathematical Software,
// Vol 7(1), March 1981.
#include <vector>
#include "ceres/ceres.h"
#include "gflags/gflags.h"
#include "glog/logging.h"
using ceres::AutoDiffCostFunction;
using ceres::CostFunction;
using ceres::Problem;
using ceres::Solve;
using ceres::Solver;
struct F1 {
template <typename T>
bool operator()(const T* const x1, const T* const x2, T* residual) const {
// f1 = x1 + 10 * x2;
residual[0] = x1[0] + 10.0 * x2[0];
return true;
}
};
struct F2 {
template <typename T>
bool operator()(const T* const x3, const T* const x4, T* residual) const {
// f2 = sqrt(5) (x3 - x4)
residual[0] = sqrt(5.0) * (x3[0] - x4[0]);
return true;
}
};
struct F3 {
template <typename T>
bool operator()(const T* const x2, const T* const x3, T* residual) const {
// f3 = (x2 - 2 x3)^2
residual[0] = (x2[0] - 2.0 * x3[0]) * (x2[0] - 2.0 * x3[0]);
return true;
}
};
struct F4 {
template <typename T>
bool operator()(const T* const x1, const T* const x4, T* residual) const {
// f4 = sqrt(10) (x1 - x4)^2
residual[0] = sqrt(10.0) * (x1[0] - x4[0]) * (x1[0] - x4[0]);
return true;
}
};
DEFINE_string(minimizer,
"trust_region",
"Minimizer type to use, choices are: line_search & trust_region");
int main(int argc, char** argv) {
GFLAGS_NAMESPACE::ParseCommandLineFlags(&argc, &argv, true);
google::InitGoogleLogging(argv[0]);
double x1 = 3.0;
double x2 = -1.0;
double x3 = 0.0;
double x4 = 1.0;
Problem problem;
// Add residual terms to the problem using the autodiff
// wrapper to get the derivatives automatically. The parameters, x1 through
// x4, are modified in place.
problem.AddResidualBlock(
new AutoDiffCostFunction<F1, 1, 1, 1>(new F1), nullptr, &x1, &x2);
problem.AddResidualBlock(
new AutoDiffCostFunction<F2, 1, 1, 1>(new F2), nullptr, &x3, &x4);
problem.AddResidualBlock(
new AutoDiffCostFunction<F3, 1, 1, 1>(new F3), nullptr, &x2, &x3);
problem.AddResidualBlock(
new AutoDiffCostFunction<F4, 1, 1, 1>(new F4), nullptr, &x1, &x4);
Solver::Options options;
LOG_IF(FATAL,
!ceres::StringToMinimizerType(CERES_GET_FLAG(FLAGS_minimizer),
&options.minimizer_type))
<< "Invalid minimizer: " << CERES_GET_FLAG(FLAGS_minimizer)
<< ", valid options are: trust_region and line_search.";
options.max_num_iterations = 100;
options.linear_solver_type = ceres::DENSE_QR;
options.minimizer_progress_to_stdout = true;
// clang-format off
std::cout << "Initial x1 = " << x1
<< ", x2 = " << x2
<< ", x3 = " << x3
<< ", x4 = " << x4
<< "\n";
// clang-format on
// Run the solver!
Solver::Summary summary;
Solve(options, &problem, &summary);
std::cout << summary.FullReport() << "\n";
// clang-format off
std::cout << "Final x1 = " << x1
<< ", x2 = " << x2
<< ", x3 = " << x3
<< ", x4 = " << x4
<< "\n";
// clang-format on
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号