

参考
1最完备的推导
https://blog.csdn.net/Hansry/article/details/104203448
预积分方差
https://blog.csdn.net/qq_39266065/article/details/115348824
2 博士推导
3预积分公式总结与推导——邱笑晨
https://github.com/PetWorm/IMU-Preintegration-Propogation-Doc
4 知乎 内部讲解 全局优化
https://www.zhihu.com/column/c_1286314934914342912
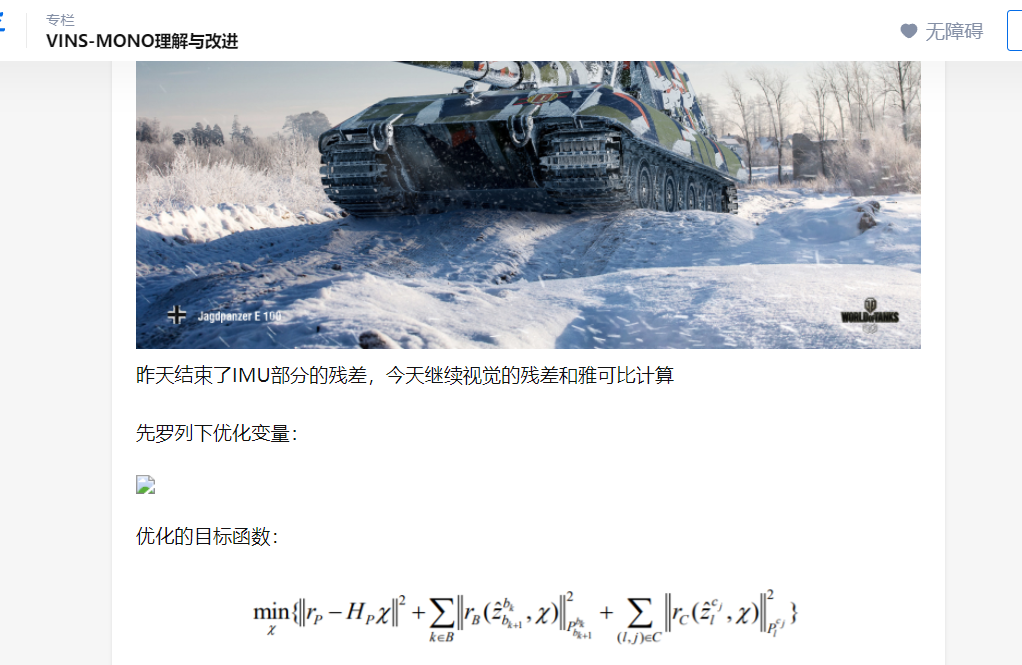
https://zhuanlan.zhihu.com/p/473227932
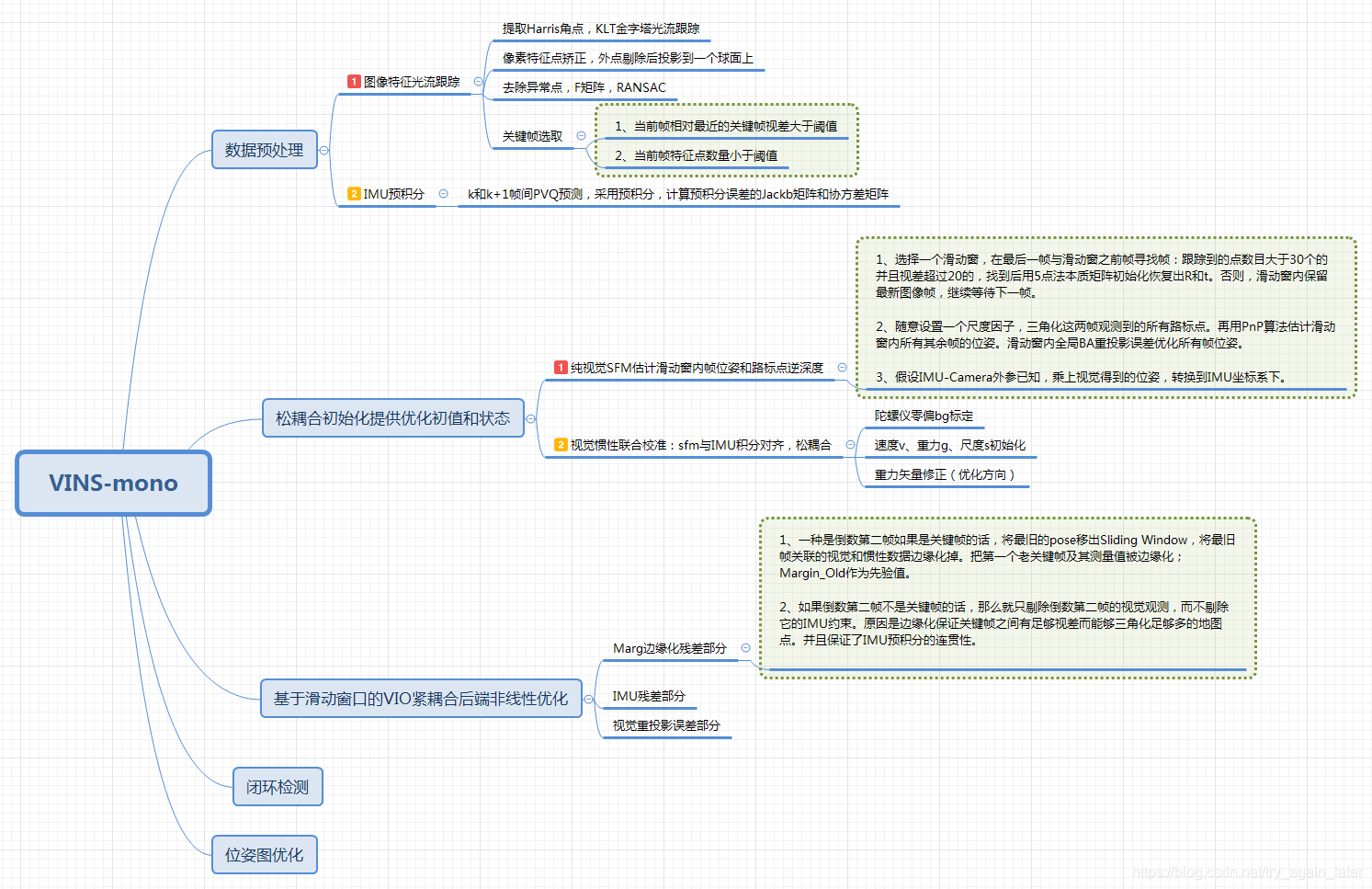
5网友思维导图
https://blog.csdn.net/try_again_later/article/details/97106200
6其他参考博客
VINS-Mono理论学习——IMU预积分 Pre-integration (Jacobian 协方差) (快把这个整个抄下来了,只能说总结的太好了)
VINS-Mono关键知识点总结——预积分和后端优化IMU部分
大量参考了下面两位大佬的文章
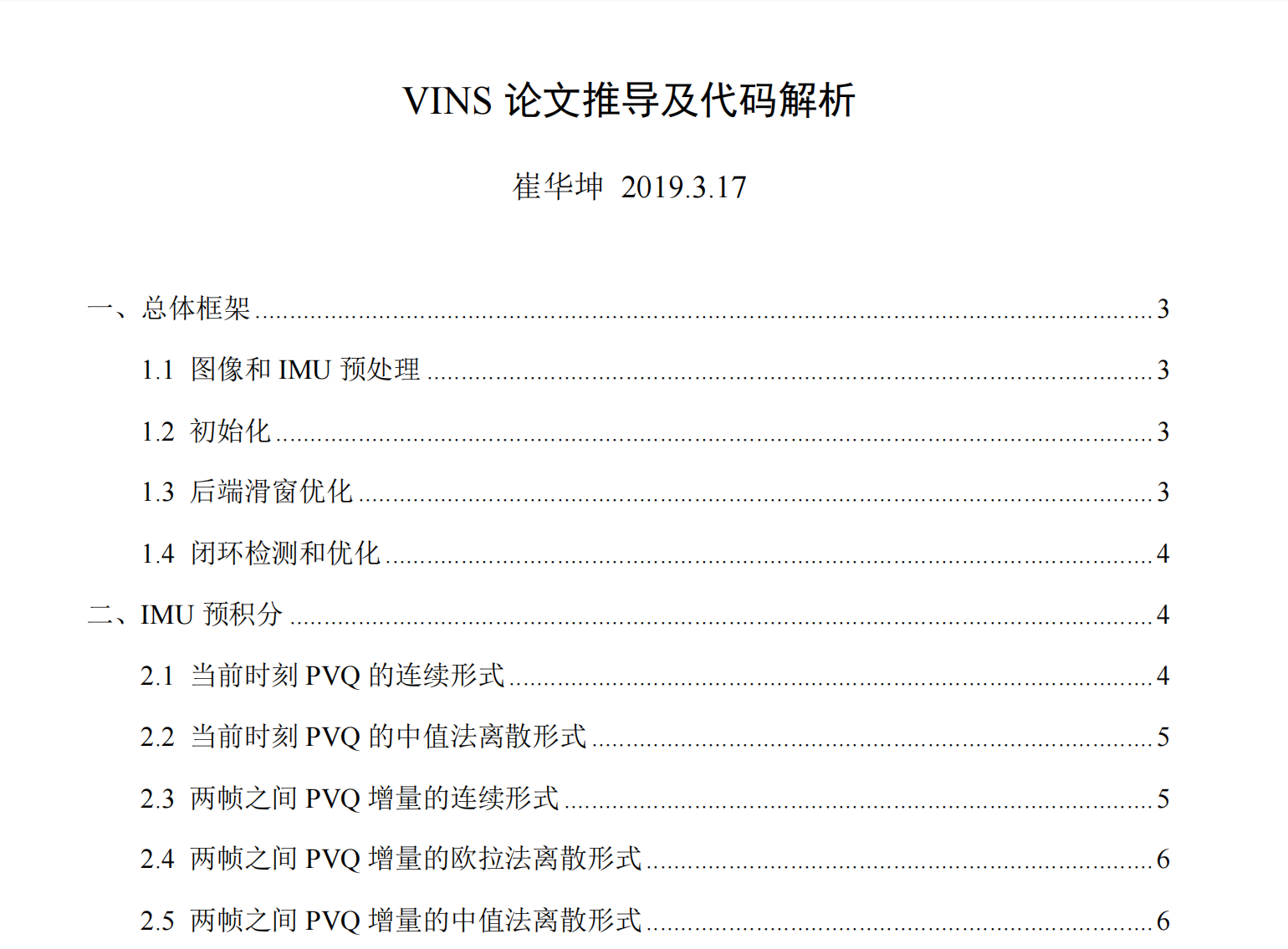
崔华坤的《VINS论文推导及代码解析》
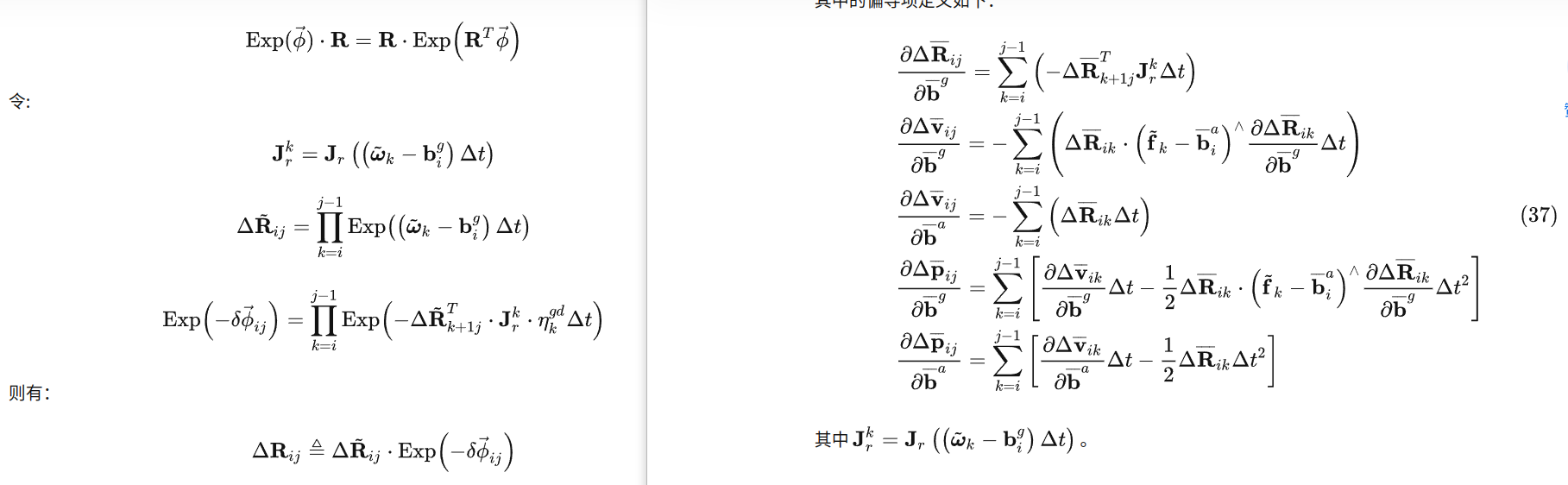
邱笑晨《预积分总结与公式推导》
论文
VINS-Mono
1、Visual-Inertial-Aided Navigation for High-Dynamic Motion in Built Environments Without Initial Conditions
2、深蓝学院VIO课程——基于优化的IMU预积分与视觉信息融合
3、预积分公式总结与推导——邱笑晨
https://github.com/PetWorm/IMU-Preintegration-Propogation-Doc
自己推导过程

 浙公网安备 33010602011771号
浙公网安备 33010602011771号