

如果想深入了解IMU和GPS融合原理,可以看看这篇文章: 重读经典《Quaternion kinematics for the error-state Kalman filter》,这也是Coursera课程关于这一项目的参考文献。
(124条消息) 动手学无人驾驶(6):基于IMU和GPS数据融合的自车定位_自动驾驶小学生的博客-CSDN博客_基于imu和gps数据融合的自车定位

大家可以先看看下面这个视频,对本项目要介绍的内容有个初步了解,视频链接为:https://www.bilibili.com/video/BV1cE411D7Y9?p=18
Coursera 自动驾驶教程:Part2 - State Estimation and Localization for Self-Driving Cars
文章目录









3.4 Sensor Fusion
介绍完理论部分,下面我们开始一步步实现代码部分。
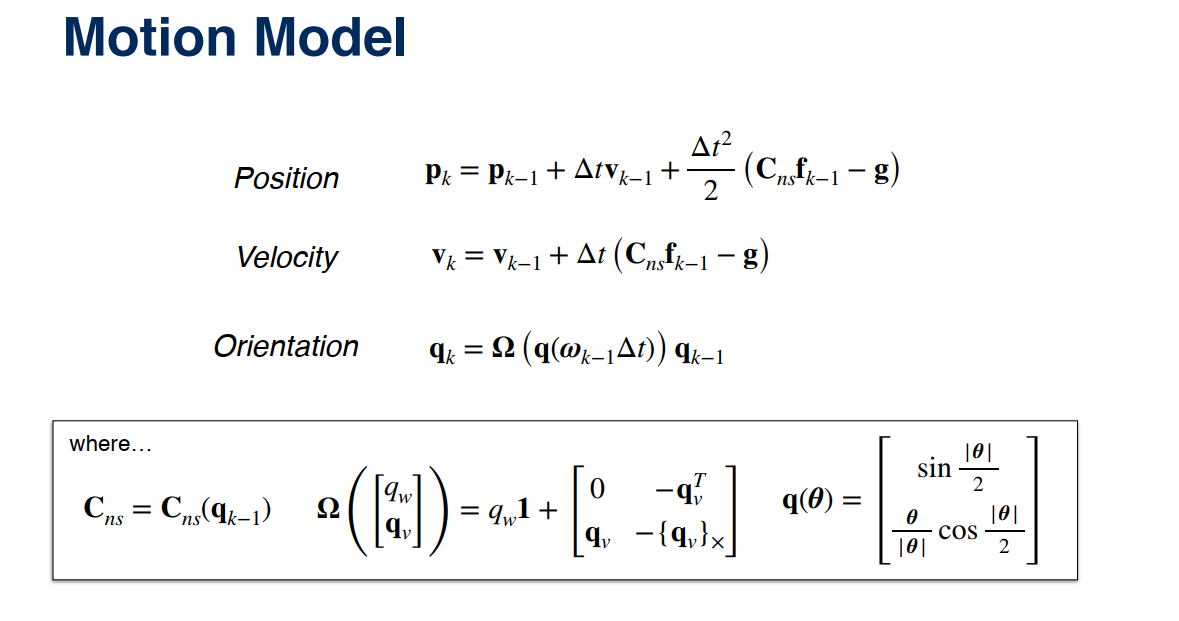
(1)使用IMU数据进行更新,需要注意旋转矩阵的计算。

# 1. Update state with IMU inputs
C_ns = Quaternion(*q_est[k-1]).to_mat() #rotational matrix
C_ns_dot_f_km = np.dot(C_ns, imu_f.data[k-1])
# 1.1 Linearize the motion model and compute Jacobians
p_est[k] = p_est[k-1] + delta_t * v_est[k-1] + (delta_t**2)/2.0 * (C_ns.dot(imu_f.data[k-1]) + g)
v_est[k] = v_est[k-1] + delta_t*(C_ns.dot(imu_f.data[k-1]) + g)
# Instead of using Omega, we use quaternion multiplication
q_est[k] = Quaternion(axis_angle = imu_w.data[k-1] * delta_t).quat_mult_right(q_est[k-1])
(2)状态协方差矩阵的更新

# 2. Propagate uncertainty
# Global orientation error, over local orientation error
# See Sola technical report
F = np.identity(9)
F[:3, 3:6] = delta_t * np.identity(3)
#F[3:6, 6:] = -(C_ns.dot(skew_symmetric(imu_f.data[k-1].reshape((3,1)))))
F[3:6,6:9] = -skew_symmetric(C_ns_dot_f_km) *delta_t
Q = np.identity(6)
Q[:, :3] *= delta_t**2 * var_imu_f
Q[:, -3:] *= delta_t**2 * var_imu_w
p_cov[k] = F.dot(p_cov[k-1]).dot(F.T) + l_jac.dot(Q).dot(l_jac.T) #uncertainty
(3)计算kalman增益

# 3.1 Compute Kalman Gain
K_k = p_cov_check.dot(h_jac.T).dot(np.linalg.inv(h_jac.dot(p_cov_check).dot(h_jac.T)+np.identity(3)*sensor_var))
(4)计算误差状态
# 3.2 Compute error state
errorState = K_k.dot(y_k - p_check)
5)误差状态修正
# 3.3 Correct predicted state
p_hat = p_check + errorState[:3]
v_hat = v_check + errorState[3:6]
q_hat = Quaternion(euler=errorState[6:]).quat_mult_left(\
q_check) # left or right
(6)修正状态协方差矩阵
# 3.4 Compute corrected covariance
p_cov_hat = (np.identity(9) - K_k.dot(h_jac)).dot(p_cov_check)
到这一步,就完成了整个处理过程,可以看看最终的结果,途中橙色为轨迹真值位置,蓝色为估计的轨迹位置。

也可以绘制误差分布图,如下图所示,这里使用的3 σ 3\sigma3σ标准。
至此,本文要介绍的内容就结束了。基于IMU和GPS的位置定位,关键点在于IMU的运动模型,特别是四元数更新部分,里面牵涉到的变化比较多,需要留心。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号