
ROS开发(3-1)ROS串口解析GPS数据-自定义消息
参考资料
https://www.cnblogs.com/gooutlook/p/16493595.html
安装 ros串口库
sudo apt-get install ros-<版本号>-serial
Ubuntu20.04 noetic
Ubuntu18.04 melodic
Ubuntu16.04 kinetic
Ubuntu14.04 indigo
1创建环境工程
1创建catkin_gps/src工程文件环境
在catkin_gps路径下编译
catkin_make
自动生成

2 创建项目工程
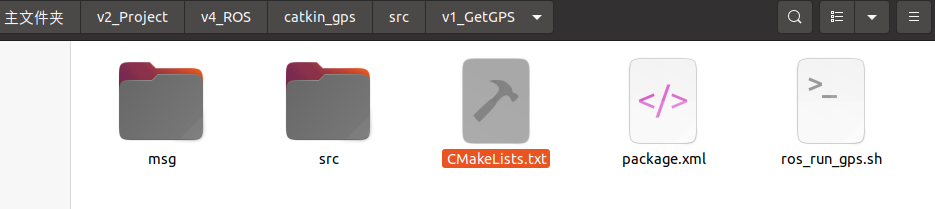
环境工程catkin_gps/src下创建工程v1_GetGPS
在v1_GetGPS下创建文件.
2-1创建消息文件
在项目包里面创建msg文件夹
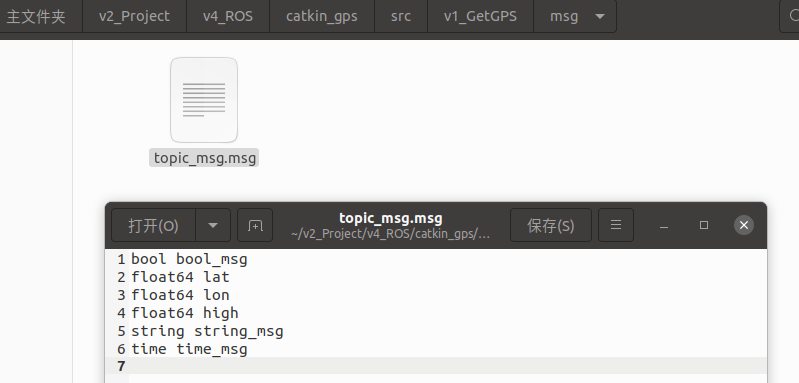
bool bool_msg float64 lat float64 lon float64 high string string_msg time time_msg
2-2 创建编辑package.xml

包含文件依赖
1 自定义消息
2 串口
<?xml version="1.0"?>
<package format="2">
<name>v1_GetGPS</name>
<version>0.0.0</version>
<description>The v1_GetGPS package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="dongdong@todo.todo">dongdong</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>message_generation</build_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>serial</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>serial</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>message_runtime</exec_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>serial</exec_depend>
<exec_depend>std_msgs</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
修改
1项目名字v1_GetGPS和文件夹一样
2-3创建编辑CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(v1_GetGPS)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
find_package(catkin REQUIRED COMPONENTS
message_generation
message_runtime
roscpp
rospy
std_msgs
serial #串口引用
)
add_message_files(
FILES
topic_msg.msg#消息引用-添加我们自己定义的xxx.msg文件
)
generate_messages(
DEPENDENCIES
std_msgs#消息引用-自带
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES my_topic002
# CATKIN_DEPENDS message_generation message_runtime roscpp rospy std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
add_executable(publisher_gps src/publisher_gps.cpp)
target_link_libraries(publisher_gps ${catkin_LIBRARIES})
add_dependencies(publisher_gps ${PROJECT_NAME}_generate_messages_cpp)
add_executable(subscriber_gps src/subscriber_gps.cpp)
target_link_libraries(subscriber_gps ${catkin_LIBRARIES})
add_dependencies(subscriber_gps ${PROJECT_NAME}_generate_messages_cpp)
add_executable(serialPort src/serialPort.cpp)
target_link_libraries(serialPort ${catkin_LIBRARIES})
add_dependencies(serialPort ${PROJECT_NAME}_generate_messages_cpp)
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener ${PROJECT_NAME}_generate_messages_cpp)
1修改项目名字和文件夹一样

2 修改自定义的消息


3项目功能
3-1发布器
gps数据
从串口助手cutecom可以看到,GPS的数据为以下形式(GGA协议): $GNGGA,131547.30,3908.17889767,N,11715.45111804,E,1,14,1.7,18.282,M,-8.614,M, ,*54 字段0:$GNGGA,语句ID,表明该语句为Global Positioning System Fix Data(GGA)GPS定位信息 字段1:UTC 时间,hhmmss.sss,时分秒格式 字段2:纬度ddmm.mmmm,度分格式(前导位数不足则补0) 字段3:纬度N(北纬)或S(南纬) 字段4:经度dddmm.mmmm,度分格式(前导位数不足则补0) 字段5:经度E(东经)或W(西经) 字段6:GPS状态,0=未定位,1=非差分定位,2=差分定位,3=无效PPS,6=正在估算 字段7:正在使用的卫星数量(前导位数不足则补0) 字段8:HDOP水平精度因子(0.5 - 99.9) 字段9:海拔高度(-9999.9 - 99999.9) 字段10:地球椭球面相对大地水准面的高度 字段11:差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空) 字段12:差分站ID号0000 - 1023(前导位数不足则补0,如果不是差分定位将为空) 字段13:校验值 由于在串口读取过程中,有可能每次不能完全读取到完整的信息,所以根据上述GGA协议的数据格式及含义,可用以下代码截取出一段符合协议要求的数据。

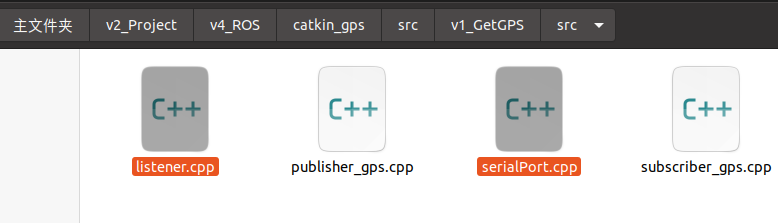
v1_GetGPS/src下创建serialPort.cpp
#include <string> #include <vector> #include <sstream> #include <cmath> #include <cstdlib>//string转化为double #include <iomanip>//保留有效小数 #include <ros/ros.h> #include <serial/serial.h> //ROS已经内置了的串口包 #include "ros/time.h"// 时间戳 //0 导入消息 工程名字/消息名字 #include "v1_GetGPS/topic_msg.h" #include "std_msgs/String.h" #include <std_msgs/Empty.h> serial::Serial ser; //声明串口对象 //解析GPS void RecePro(std::string s , double& lat , double& lon, double& high ) { //分割有效数据,存入vector中 std::vector<std::string> v; std::string::size_type pos1, pos2; pos2 = s.find(","); pos1 = 0; while ( std::string::npos !=pos2 ) { v.push_back( s.substr( pos1, pos2-pos1 ) ); pos1 = pos2 + 1; pos2 = s.find(",",pos1); } if ( pos1 != s.length() ) v.push_back( s.substr( pos1 )); //解析出经纬度 //字段6:GPS状态,0=未定位,1=非差分定位,2=差分定位,3=无效PPS,6=正在估算 if (v.max_size() >= 6 && (v[6] == "1" || v[6] == "2" || v[6] == "3" || v[6] == "4" || v[6] == "5" || v[6] == "6" || v[6] == "8" || v[6] == "9")) { //纬度 if (v[2] != "") lat = std::atof(v[2].c_str()) / 100; int ilat = (int)floor(lat) % 100; lat = ilat + (lat - ilat) * 100 / 60; //经度 if (v[4] != "") lon = std::atof(v[4].c_str()) / 100; int ilon = (int)floor(lon) % 1000; lon = ilon + (lon - ilon) * 100 / 60; //海拔高度 if (v[9] != "") high = std::atof(v[9].c_str()) ; } } int main(int argc, char** argv) { //初始化节点 ros::init(argc, argv, "serial_node"); //声明节点句柄 ros::NodeHandle nh; //注册Publisher到话题GPS ros::Publisher GPS_pub = nh.advertise<v1_GetGPS::topic_msg>("GPS",1000); try { //串口设置 ser.setPort("/dev/ttyUSB0"); ser.setBaudrate(115200); serial::Timeout to = serial::Timeout::simpleTimeout(5000); ser.setTimeout(to); ser.open(); } catch (serial::IOException& e) { ROS_ERROR_STREAM("Unable to open Serial Port !"); return -1; } if (ser.isOpen()) { ROS_INFO_STREAM("Serial Port initialized"); } else { return -1; } ros::Rate loop_rate(50); std::string strRece; while (ros::ok()) { if (ser.available()) { //1.读取串口信息: //ROS_INFO_STREAM("Reading from serial port\n"); //通过ROS串口对象读取串口信息 //std::cout << ser.available(); //std::cout << ser.read(ser.available()); strRece += ser.read(ser.available()); //std::cout <<"strRece:" << strRece << "\n" ; //strRece = "$GNGGA,122020.70,3908.17943107,N,11715.45190423,E,1,17,1.5,19.497,M,-8.620,M,,*54\r\n"; //2.截取数据、解析数据: //GPS起始标志 std::string gstart = "$GN"; //GPS终止标志 std::string gend = "\r\n"; int i = 0, start = -1, end = -1; while ( i < strRece.length() ) { //找起始标志 start = strRece.find(gstart); //如果没找到,丢弃这部分数据,但要留下最后2位,避免遗漏掉起始标志 if ( start == -1) { if (strRece.length() > 2) strRece = strRece.substr(strRece.length()-3); break; } //如果找到了起始标志,开始找终止标志 else { //找终止标志 end = strRece.find(gend); //如果没找到,把起始标志开始的数据留下,前面的数据丢弃,然后跳出循环 if (end == -1) { if (end != 0) strRece = strRece.substr(start); break; } //如果找到了终止标志,把这段有效的数据剪切给解析的函数,剩下的继续开始寻找 else { i = end; //ros::Time begin = ros::Time::now(); double secs =ros::Time::now().toSec(); //把有效的数据给解析的函数以获取经纬度 double lat, lon, high; RecePro(strRece.substr(start,end+2-start),lat,lon,high); //保留位数7位 std::cout << std::setiosflags(std::ios::fixed)<<std::setprecision(7)<< "纬度:" << lat << " 经度:"<< lon <<" 高度: "<< high <<" 时间: " << secs << "\n"; //发布消息到话题 v1_GetGPS::topic_msg GPS_data; GPS_data.lat = lat; GPS_data.lon = lon; GPS_data.high = high; GPS_pub.publish(GPS_data); //如果剩下的字符大于等于4,则继续循环寻找有效数据,如果所剩字符小于等于3则跳出循环 if ( i+5 < strRece.length()) strRece = strRece.substr(end+2); else { strRece = strRece.substr(end+2); break; } } } } } ros::spinOnce(); loop_rate.sleep(); } }
修改
1包含头文件
自定义消息路径和名字 工程包名字imu_gps_publish+自定义的消息名字topic_msg
2 所有关于自定义消息的引用名字
包含头文件


3 修改波特率和串口号
并给与GPS串口权限
https://www.cnblogs.com/gooutlook/p/16494885.html
3-2接收节点
v1_GetGPS/src下创建listener.cpp
#include <iomanip>
#include "ros/ros.h"
//自定义ros消息
#include "std_msgs/String.h"
#include "v1_GetGPS/topic_msg.h"
#include "ros/time.h"// 时间戳
void chatterCallback(const v1_GetGPS::topic_msg::ConstPtr& msg)
{
//ros::Time begin = ros::Time::now();
double secs =ros::Time::now().toSec();
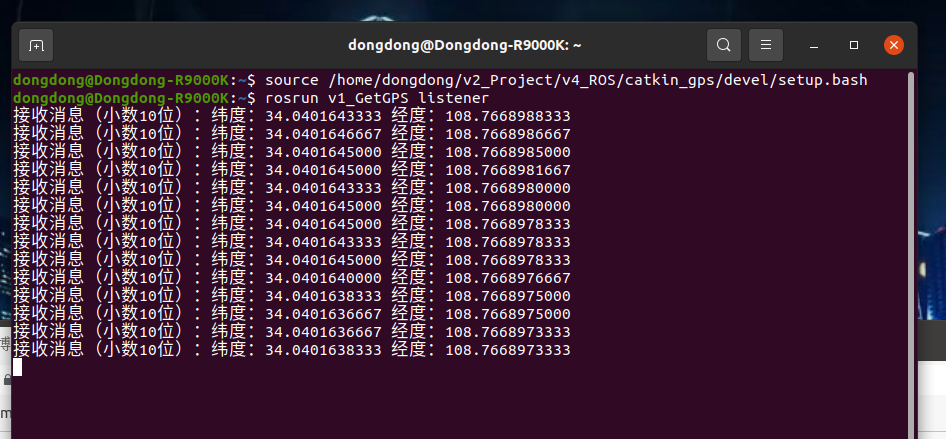
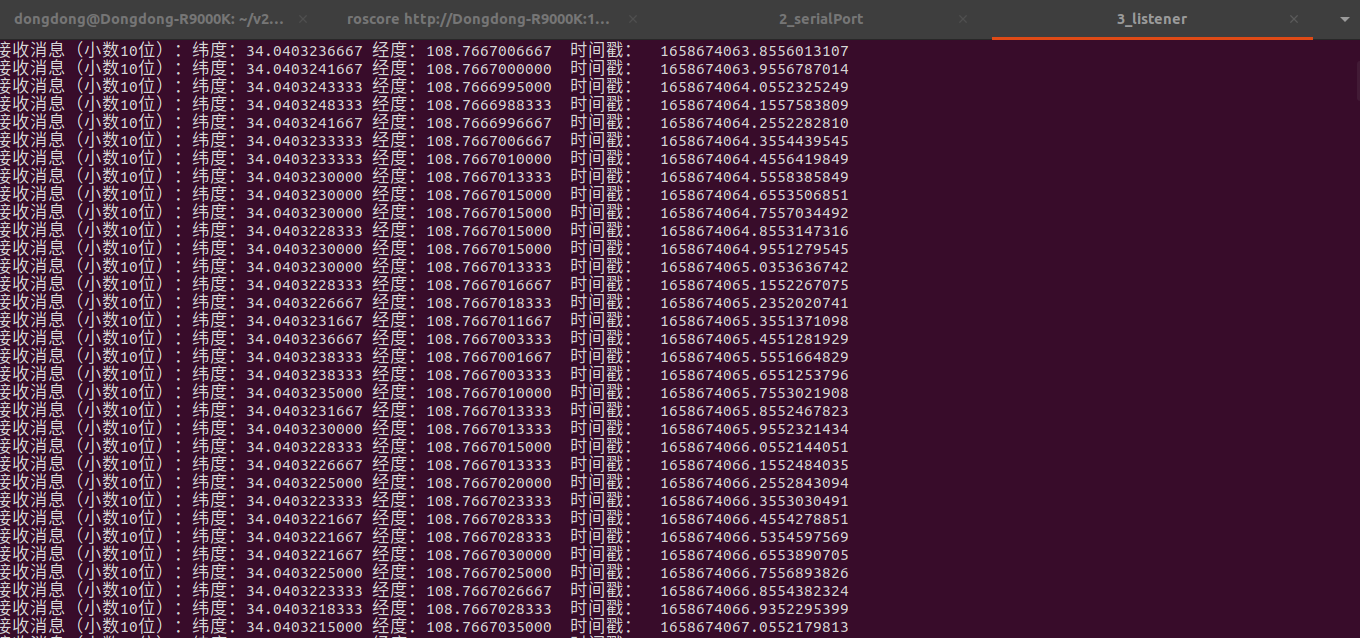
std::cout << "接收消息(小数10位):"<<std::setiosflags(std::ios::fixed) << std::setprecision(10) << "纬度:" << msg->lat << " 经度:" << msg->lon <<" 高度: "<< msg->high <<" 时间戳: "<< secs <<"\n";
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("GPS", 1000, chatterCallback);
ros::spin();
return 0;
}
修改
1自定义消息路径和名字 工程包名字imu_gps_publish+自定义的消息名字topic_msg

2 所有关于自定义消息的引用名字

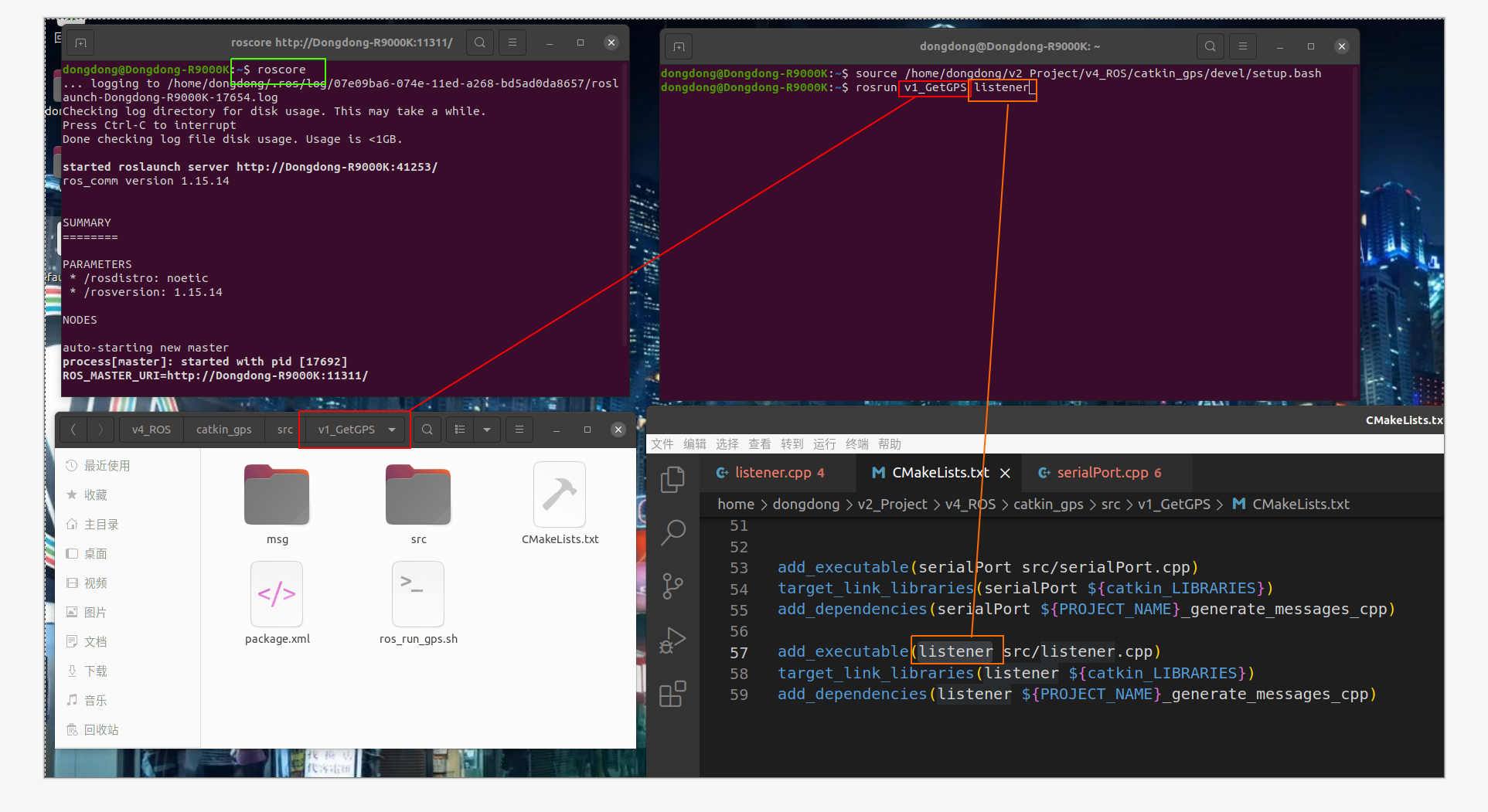
3-3 修改CMakeLists.txt编译节点
添加发射和接受节点的生成
add_executable(serialPort src/serialPort.cpp)
target_link_libraries(serialPort ${catkin_LIBRARIES})
add_dependencies(serialPort ${PROJECT_NAME}_generate_messages_cpp)
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener ${PROJECT_NAME}_generate_messages_cpp)
完整的
cmake_minimum_required(VERSION 3.0.2)
project(v1_GetGPS)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
find_package(catkin REQUIRED COMPONENTS
message_generation
message_runtime
roscpp
rospy
std_msgs
serial #串口引用
)
add_message_files(
FILES
topic_msg.msg#消息引用-添加我们自己定义的xxx.msg文件
)
generate_messages(
DEPENDENCIES
std_msgs#消息引用-自带
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES my_topic002
# CATKIN_DEPENDS message_generation message_runtime roscpp rospy std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
add_executable(publisher_gps src/publisher_gps.cpp)
target_link_libraries(publisher_gps ${catkin_LIBRARIES})
add_dependencies(publisher_gps ${PROJECT_NAME}_generate_messages_cpp)
add_executable(subscriber_gps src/subscriber_gps.cpp)
target_link_libraries(subscriber_gps ${catkin_LIBRARIES})
add_dependencies(subscriber_gps ${PROJECT_NAME}_generate_messages_cpp)
add_executable(serialPort src/serialPort.cpp)
target_link_libraries(serialPort ${catkin_LIBRARIES})
add_dependencies(serialPort ${PROJECT_NAME}_generate_messages_cpp)
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener ${PROJECT_NAME}_generate_messages_cpp)
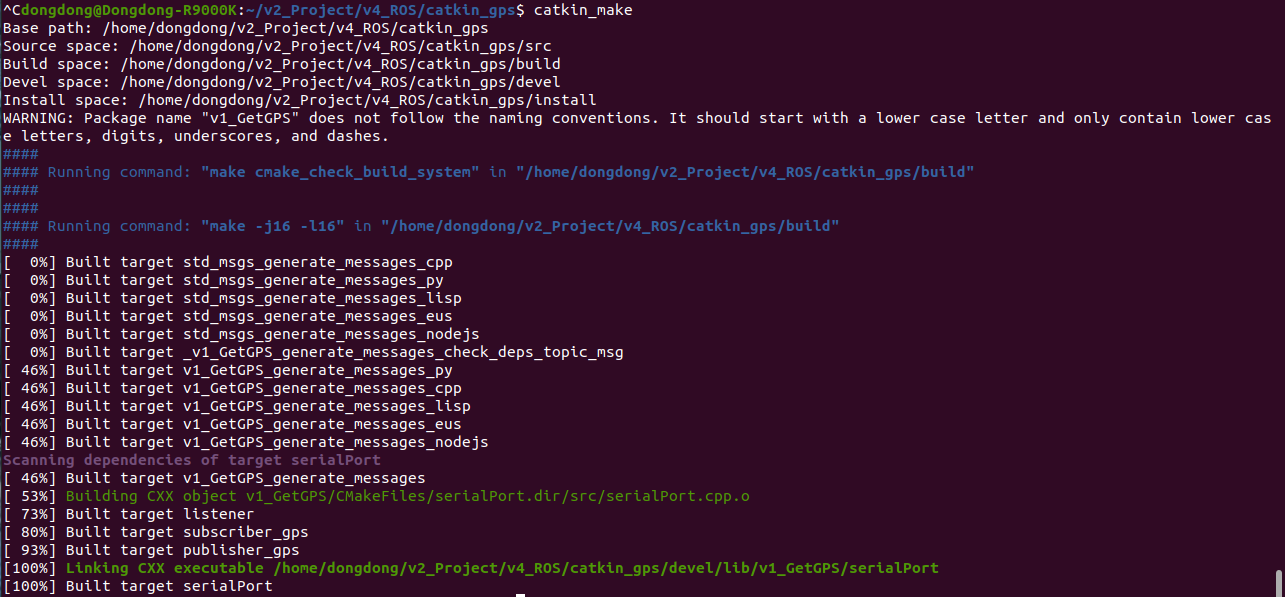
3-4 编译工程
在大工程catkin_gps下编译
catkin_make
4运行工程
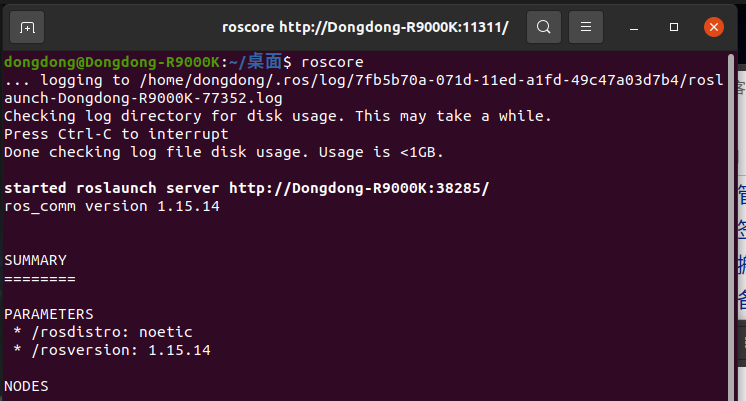
4-1 运行ros初始化
随意路径运行,必须单独运行在一个窗口
roscore
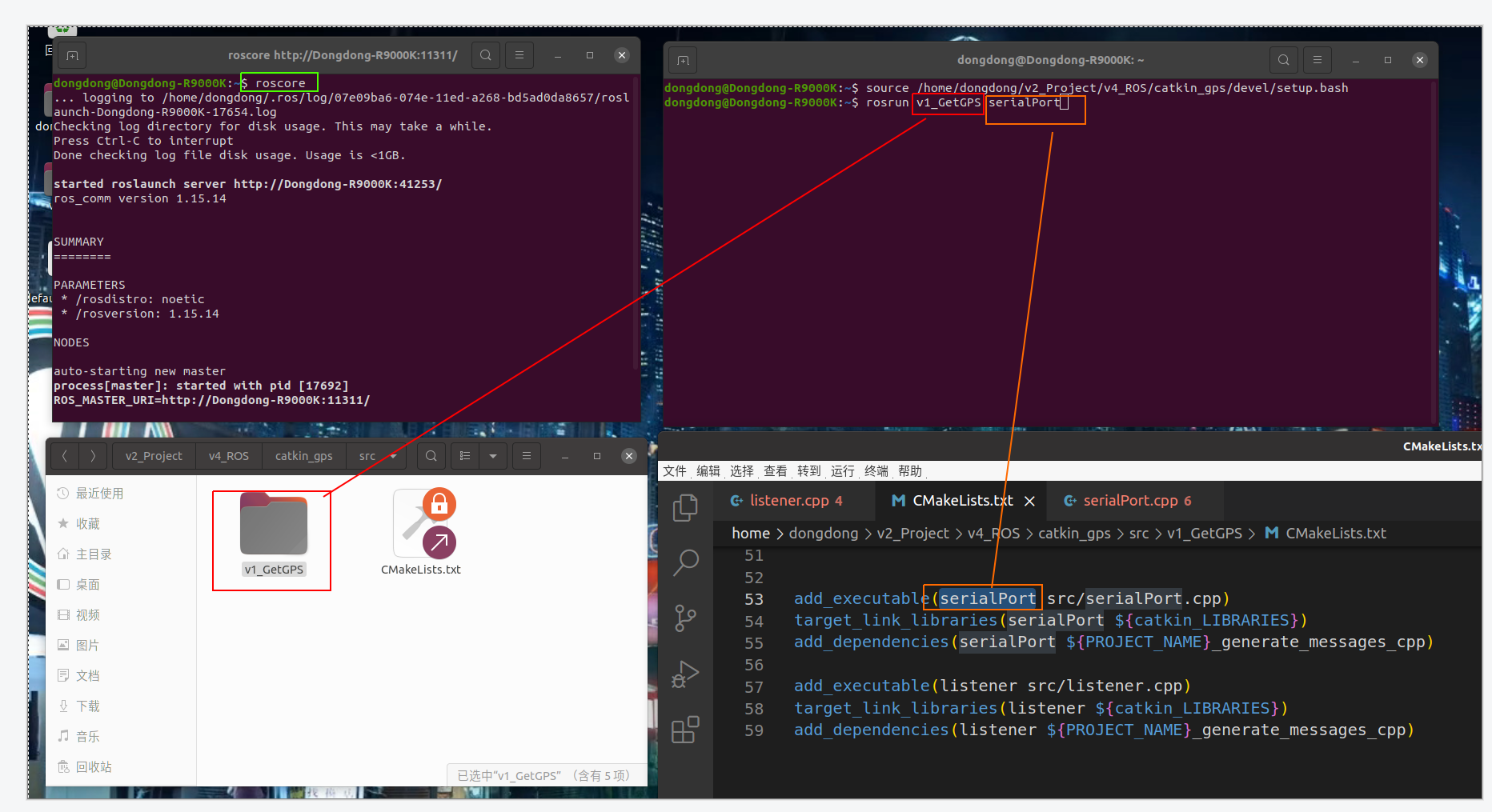
4-2 在命令行注册项目地址,使得命令行可以找到要执行的ros节点
source /home/dongdong/v2_Project/v4_ROS/catkin_gps/devel/setup.bash
4-3 运行节点
rosrun 项目名字 编译节点
运行发布节点
rosrun v1_GetGPS serialPort
运行接受节点
使用脚本一次性执行
https://www.cnblogs.com/gooutlook/p/16495002.html
创建脚本
gedit ros_run_gps.sh
#!/bin/sh #延迟1秒执行 sleep 1 echo "ROS——GPS 测试" #echo "GPS 测试开始,消息记录到日志里" > /home/pi/start/test_desk1.log echo "1 开启ros节点 roscore 等待完全开启再往后执行 " gnome-terminal -t "1_roscore" -x bash -c "\ roscore; \ exit;exec bash;" sleep 5 echo "2 开启发送节点 serialPort " gnome-terminal -t "2_serialPort" -x bash -c "\ echo \"dongdong\" | sudo chmod 777 /dev/ttyUSB0; \ source /home/dongdong/v2_Project/v4_ROS/catkin_gps/devel/setup.bash; \ rosrun v1_GetGPS serialPort; \ exit;exec bash;" sleep 1 echo "3 开启接收节点 listener" gnome-terminal -t "3_listener" -x bash -c "\ source /home/dongdong/v2_Project/v4_ROS/catkin_gps/devel/setup.bash; \ rosrun v1_GetGPS listener; \ exit;exec bash;" sleep 1 #echo "执行前确保给与脚本本身执行权限 sudo chmod -R 777 xxx.sh" #echo "查看串口: ls /dev/ttyUSB* " #echo "临时给与一次串口权限: sudo chmod 777 /dev/ttyUSB0 " # 开启新的命令窗口执行 # gnome-terminal -t "窗口名字" -x bash -c "要执行的命令1;命令2;exit;exec bash;" #Shell 脚本自动输入密码 : echo "密码" | sudo 命令
给与脚本执行权限
sudo chmod -R 777 ros_run_gps.sh

运行脚本

结果
主窗口
窗口1
逐个启动比较慢,所以要等待一会在执行后续的ROS脚本
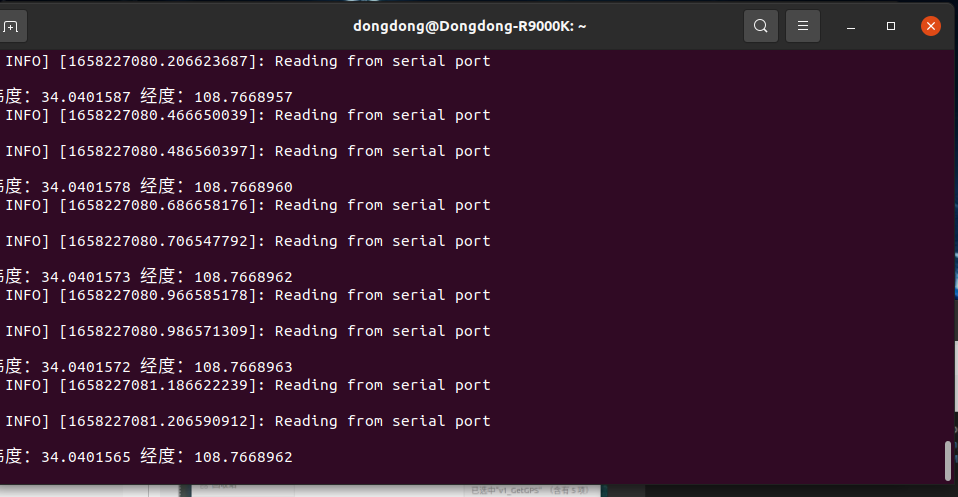
统计后1秒10次 符合GPS的数据输出
窗口2 
手动输入密码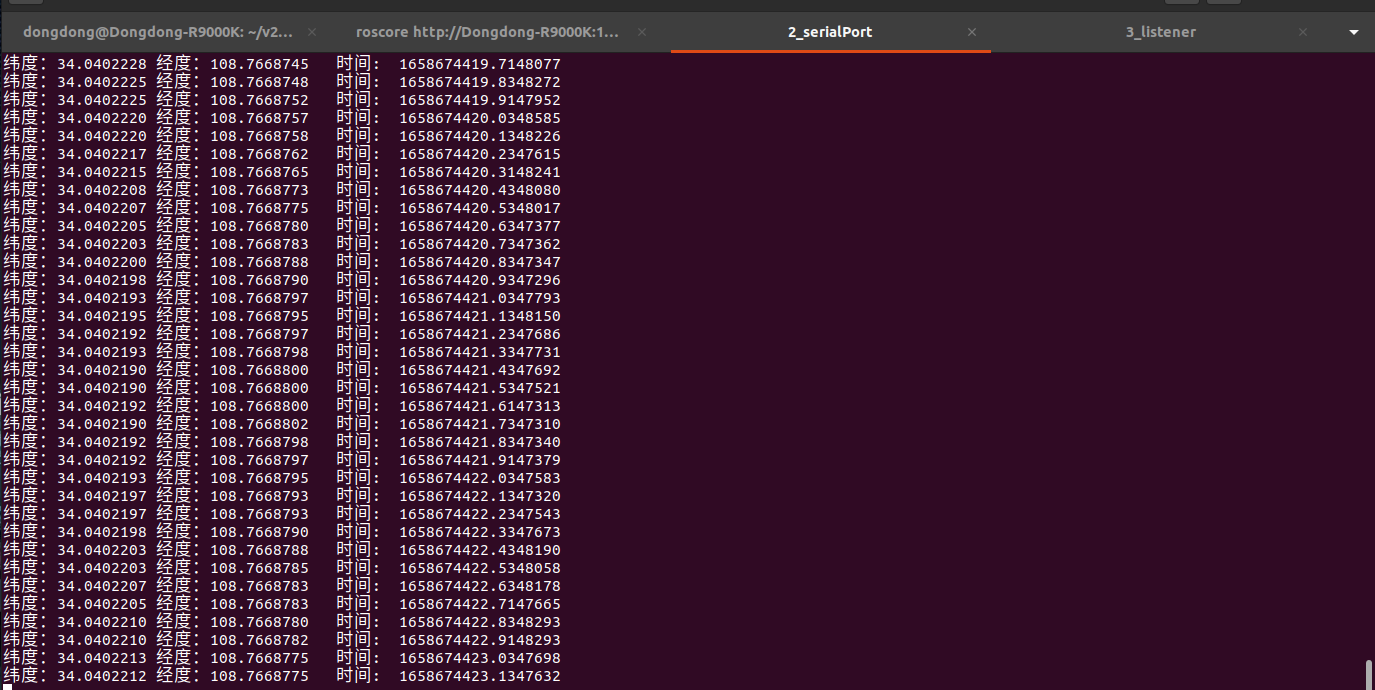
窗口3 
其他代码
1例子-追加了保存Txt的发送节点
1-1C++ 保存txt文本文件
第一步:包含头文件#include <fstream>。
#include <iostream>
#include <fstream>
using namespace std;
第二步:以覆盖的方式保存文件。
#include <iostream>
#include <fstream>
using namespace std;
int main()
{
ofstream out("out.txt");
if (out.is_open())
{
out << "This is a line.\n";
out << "This is another line.\n";
out.close();
}
system("pause");
return 0;
}
第三步:以追加的方式保存文件 ios::app。
#include <iostream>
#include <fstream>
using namespace std;
int main()
{
ofstream out("out.txt", ios::app);
if (out.is_open())
{
out << "This is a line.\n";
out << "This is another line.\n";
out.close();
}
system("pause");
return 0;
}
1-2 代码加入主工程

serialPort_saveTxt.cpp
#include <string>
#include <vector>
#include <sstream>
#include <cmath>
#include <cstdlib>//string转化为double
#include <iomanip>//保留有效小数
//txt保存使用
#include <fstream>
#include <iostream>
//ros依赖
#include <ros/ros.h>
#include <serial/serial.h> //ROS已经内置了的串口包
#include "ros/time.h"// 时间戳
//0 导入消息 工程名字/消息名字
#include "v1_GetGPS/topic_msg.h"
#include "std_msgs/String.h"
#include <std_msgs/Empty.h>
serial::Serial ser; //声明串口对象
using namespace std;
//解析GPS
void RecePro(std::string s , double& lat , double& lon, double& high )
{
//分割有效数据,存入vector中
std::vector<std::string> v;
std::string::size_type pos1, pos2;
pos2 = s.find(",");
pos1 = 0;
while ( std::string::npos !=pos2 )
{
v.push_back( s.substr( pos1, pos2-pos1 ) );
pos1 = pos2 + 1;
pos2 = s.find(",",pos1);
}
if ( pos1 != s.length() )
v.push_back( s.substr( pos1 ));
//解析出经纬度
//字段6:GPS状态,0=未定位,1=非差分定位,2=差分定位,3=无效PPS,6=正在估算
if (v.max_size() >= 6 && (v[6] == "1" || v[6] == "2" || v[6] == "3" || v[6] == "4" || v[6] == "5" || v[6] == "6" || v[6] == "8" || v[6] == "9"))
{
//纬度
if (v[2] != "") lat = std::atof(v[2].c_str()) / 100;
int ilat = (int)floor(lat) % 100;
lat = ilat + (lat - ilat) * 100 / 60;
//经度
if (v[4] != "") lon = std::atof(v[4].c_str()) / 100;
int ilon = (int)floor(lon) % 1000;
lon = ilon + (lon - ilon) * 100 / 60;
//海拔高度
if (v[9] != "") high = std::atof(v[9].c_str()) ;
}
}
int main(int argc, char** argv)
{
//保存TXT使用
string outFileName = "out.txt";
//ofstream outfile(outFileName, ios::app); //ios::app指追加写入
ofstream outfile(outFileName); //覆盖方式写入
if (!outfile.is_open())
{
cerr << "Error: can not find file " << outFileName << endl;
return 0;
}
//初始化节点
ros::init(argc, argv, "serial_node");
//声明节点句柄
ros::NodeHandle nh;
//注册Publisher到话题GPS
ros::Publisher GPS_pub = nh.advertise<v1_GetGPS::topic_msg>("GPS",1000);
try
{
//串口设置
ser.setPort("/dev/ttyUSB0");
ser.setBaudrate(115200);
serial::Timeout to = serial::Timeout::simpleTimeout(5000);
ser.setTimeout(to);
ser.open();
}
catch (serial::IOException& e)
{
ROS_ERROR_STREAM("Unable to open Serial Port !");
return -1;
}
if (ser.isOpen())
{
ROS_INFO_STREAM("Serial Port initialized");
}
else
{
return -1;
}
ros::Rate loop_rate(50);
std::string strRece;
while (ros::ok())
{
if (ser.available())
{
//1.读取串口信息:
//ROS_INFO_STREAM("Reading from serial port\n");
//通过ROS串口对象读取串口信息
//std::cout << ser.available();
//std::cout << ser.read(ser.available());
strRece += ser.read(ser.available());
//std::cout <<"strRece:" << strRece << "\n" ;
//strRece = "$GNGGA,122020.70,3908.17943107,N,11715.45190423,E,1,17,1.5,19.497,M,-8.620,M,,*54\r\n";
//2.截取数据、解析数据:
//GPS起始标志
std::string gstart = "$GN";
//GPS终止标志
std::string gend = "\r\n";
int i = 0, start = -1, end = -1;
while ( i < strRece.length() )
{
//找起始标志
start = strRece.find(gstart);
//如果没找到,丢弃这部分数据,但要留下最后2位,避免遗漏掉起始标志
if ( start == -1)
{
if (strRece.length() > 2)
strRece = strRece.substr(strRece.length()-3);
break;
}
//如果找到了起始标志,开始找终止标志
else
{
//找终止标志
end = strRece.find(gend);
//如果没找到,把起始标志开始的数据留下,前面的数据丢弃,然后跳出循环
if (end == -1)
{
if (end != 0)
strRece = strRece.substr(start);
break;
}
//如果找到了终止标志,把这段有效的数据剪切给解析的函数,剩下的继续开始寻找
else
{
i = end;
//ros::Time begin = ros::Time::now();
double secs =ros::Time::now().toSec();
//把有效的数据给解析的函数以获取经纬度
double lat, lon, high;
RecePro(strRece.substr(start,end+2-start),lat,lon,high);
//保留位数7位
std::cout << std::setiosflags(std::ios::fixed)<<std::setprecision(7)<< "纬度:" << lat << " 经度:"<< lon <<" 高度: "<< high <<" 时间: " << secs << "\n";
if (lat==0 || lon==0 || high==0)
{
}
else{
std::string secs_str= std::to_string(secs) ;
std::string lat_str= std::to_string(lat) ;
std::string lon_str= std::to_string(lon) ;
std::string high_str= std::to_string(high) ;
//
//#include <sstream>
//std::stringstream ss;
//ss<< std::setprecision(15) << secs;
//std::string secs_str=ss.str();
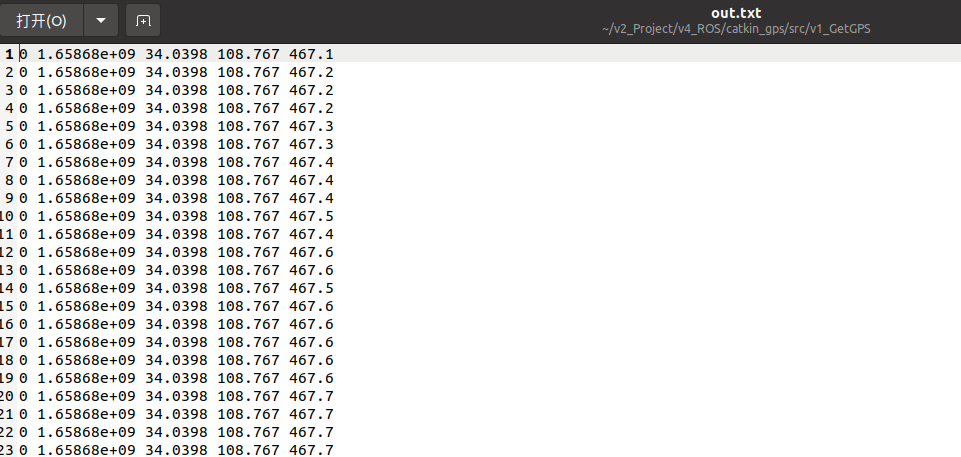
outfile << secs_str << " "<<lat_str <<" "<< lon_str <<" " << high_str<<" " << std::endl;//写TXT文件
}
//发布消息到话题
v1_GetGPS::topic_msg GPS_data;
GPS_data.lat = lat;
GPS_data.lon = lon;
GPS_data.high = high;
GPS_pub.publish(GPS_data);
//如果剩下的字符大于等于4,则继续循环寻找有效数据,如果所剩字符小于等于3则跳出循环
if ( i+5 < strRece.length())
strRece = strRece.substr(end+2);
else
{ strRece = strRece.substr(end+2);
break;
}
}
}
}
}
ros::spinOnce();
loop_rate.sleep();
}
outfile.close();// txt文件关闭
std::cout<< "采集程序关闭" <<std::endl;
return 1;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号