
pix无人机使用(4-1)硬件-光流模块
权盛电子-Pixhawk 视觉定位
---------------------------------------------------------------------------------------------------------------------------------
视觉定位模块地址:
https://item.taobao.com/item.htm?spm=a1z10.5-c.w4002-14257694551.105.D4iQOh&id=
552486250573
---------------------------------------------------------------------------------------------------------------------------------
一:固件烧写
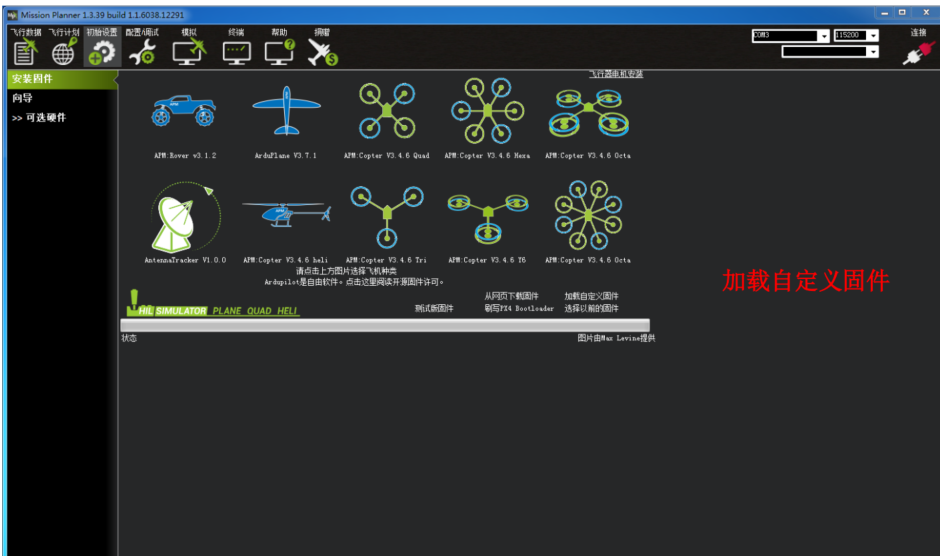
1. Mission Planner 烧写固件 :
运行 Mission Planner 地面站,点击-初始设置,选择安装固件,点击右下角-加载自定义
固件,选择固件文件夹目录下相应的固件即可。
二:安装说明
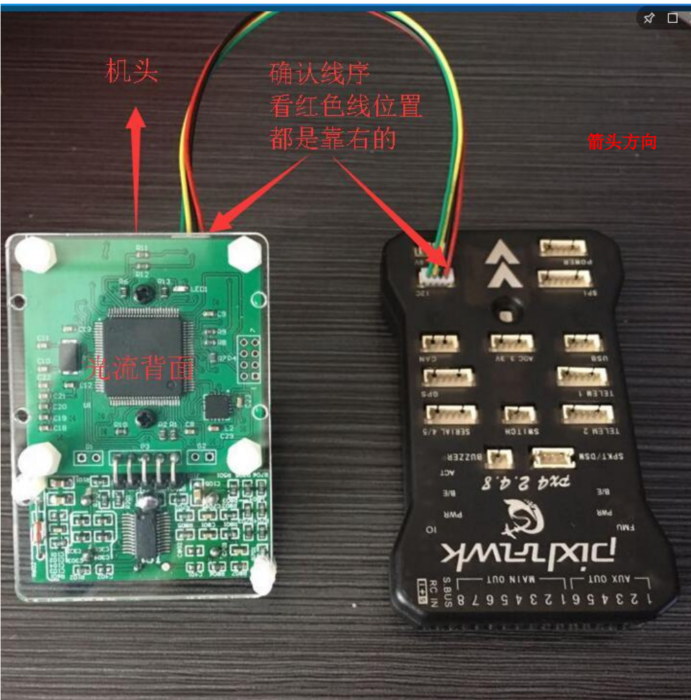
1. 方向:
视觉定位模块摄像头的镜头朝下安装,同时,摄像头正前方必须和 Pixhawk 箭头所指的
方向一致,如图所示
2. 连接:
视觉定位模块通过 P2 接口与 Pixhawk 连接,并且红色的线为正极必须接 P2 最右的针脚,
连线的另一端接 Pixhawk 的 I2C 接口,如图所示
3. 效果:如果连接确,在 Pxhawk 飞控通电时,视觉定位模块指示灯会闪烁。
三:配置教程
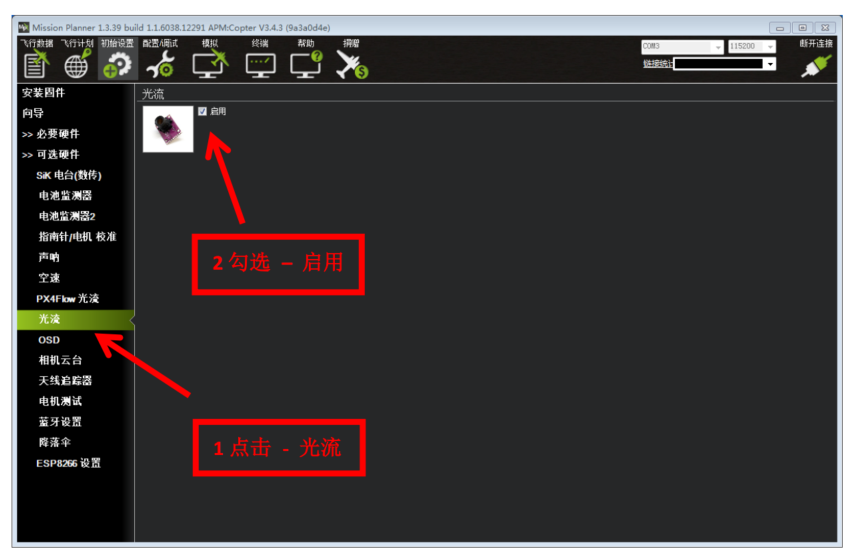
1. 视觉定位模块启动
运行 Mission Planner 地面站,将 pixhawk 飞控通过 usb 线连接至电脑端,点击地面站右
上角的连接,连接正确后,进入-初始设置界面,点击左侧-可选硬件,再选择-光流,在该界
面内,勾选-启用,即可,如图所示
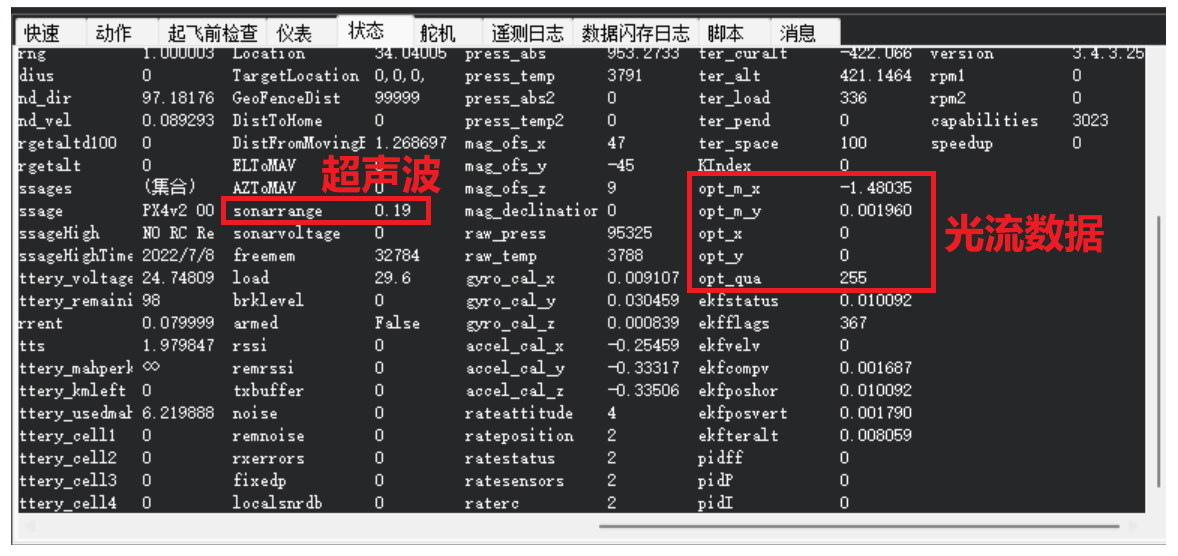
四:数据查看
视觉定位模块在完成以上配置之后,就可以查看模块的数据,断开 Pixhawk 重新连接,
在 Mission Planner 地面站飞行数据界面左下角点击状态,进入数据界面,并拉动滚动条找到
视觉定位模块及超声波的数据,如图所示

视觉定位模块及超声波的数据,注意需要将飞行器拿起至一定高度大于零,超声波才有高度
数据,如图所示
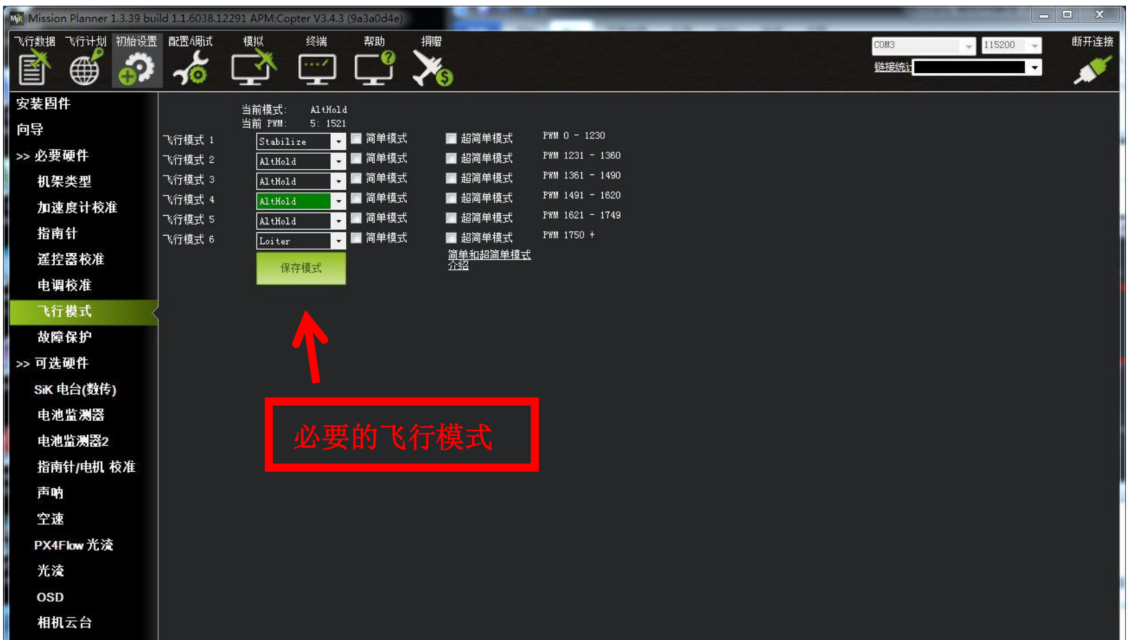
五:飞行模式
在 Pixhawk 配置完成并且定点模块数据正常输出后,需要设置必要的飞行模式,最基本
的模式为 1:Stabilize(自稳) 2:AltHold(定高) 3:Loiter(悬停),如图所示

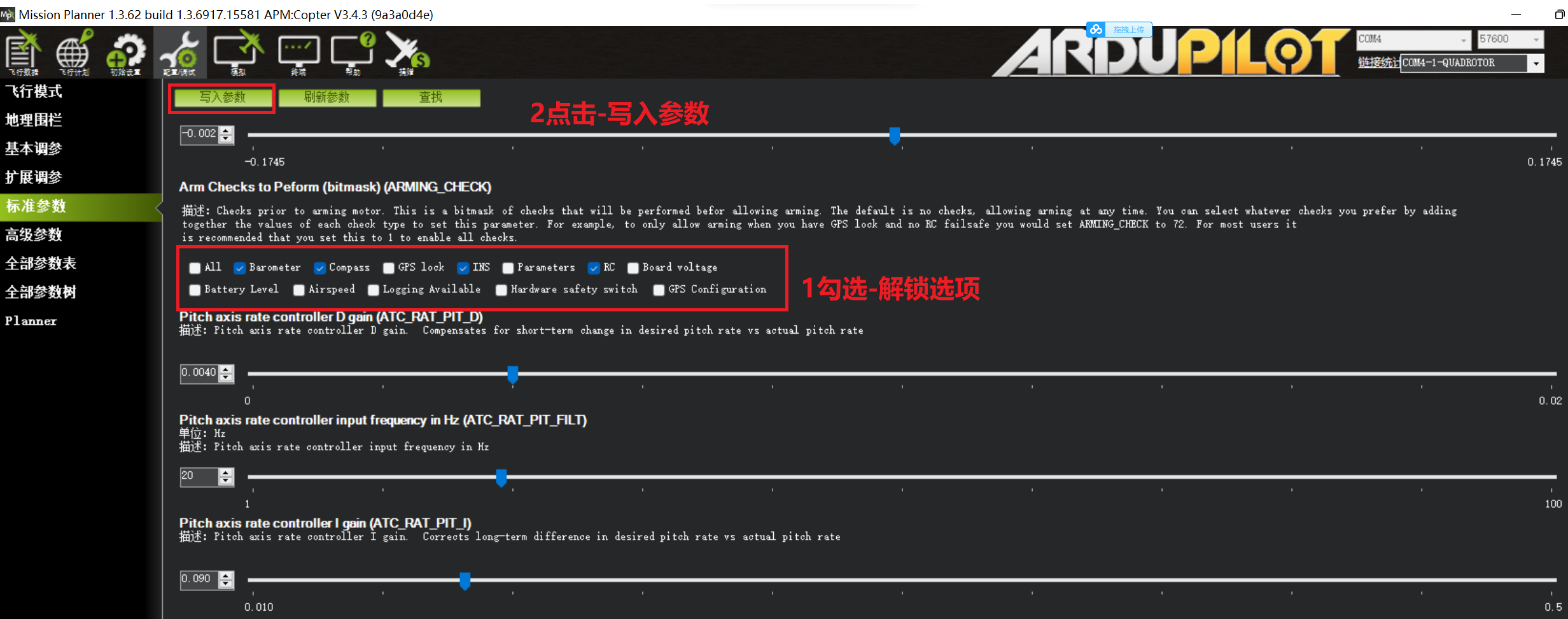
六:解锁参数
进入-配置/调试界面,点击左侧的-标准参数,在 Arming check 选项中将 All 选项去掉,
GPS 选项去掉,Parameters+Sonar 去掉,其他选项都勾选,(注:如果飞控接有 GPS 请勾选
GPS 选项),再点击-写入参数,即可,如图所示
七:其他参数
1. 在使用固件版本为 V3.3 时,将 EKF_GPS_TYPE 参数设置为 3,则关闭 GPS 只使用视觉
定位,将 EKF_GPS_TYPE 参数设置为 0,则关闭视觉定位只使用 GPS 定位。
2. 在使用固件版本为 V3.4 时,将 EK2_GPS_TYPE 参数设置为 3,则关闭 GPS 只使用视觉
定位,将 EK2_GPS_TYPE 参数设置为 0,则飞控自动选择视觉定位或者 GPS 定位,该模式
下,飞控系统会自动综合视觉模块和 GPS 两者的数据进行定位。
例如:只使用视觉定位,进入-配置/调试界面,点击左侧-全部参数表,在右下角-输入框
中输入 EK2_GPS_TYPE 并且按 Enter 键,即可搜索到该参数,将该参数的值左键双击,设置
为 3,再点击右侧的-写入参数即可,如图所示
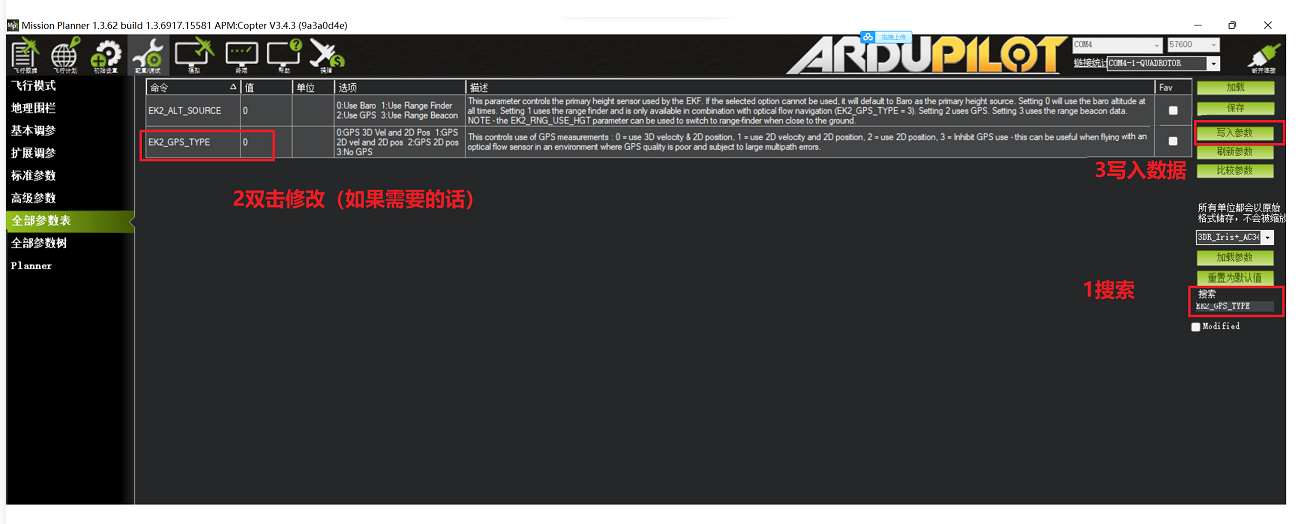
我这个是0,没有开启,因为
固件版本为 V3.4 时,将 EK2_GPS_TYPE 参数设置为 3,则关闭 GPS 只使用视觉
定位,将 EK2_GPS_TYPE 参数设置为 0,则飞控自动选择视觉定位或者 GPS 定位,该模式
下,飞控系统会自动综合视觉模块和 GPS 两者的数据进行定位。
八:实机飞行
在 Pixhawk 配置完以上所有步骤后,请务必重启 Pixhawk 飞控再次检查,以上参数是否
正确配置,否则有参数未配置成功都有可能造成定点失败,切记!
在确认 Pixhawk 正确配置所有参数之后,首次飞行,就可以找一个比较宽阔的地点实机
测试,飞行常用的顺序应该是:
1. 给飞行器上电,等待 Pixhawk 飞控蓝灯闪烁,则表示飞控已经初始化完成
2. 等待 Pixhawk 飞控蓝灯闪烁时,即可长按安全开关,直到 Pixhawk 安全开关红灯常亮,
则表示安全开关打开完毕
3. 此时将遥控的飞行模式设置为 AltHold(定高)模式,稍后以定高模式起飞
4. 等待 3~5 秒,Pixhawk 会初始化定点模式数据,之后,则可以使用遥控解锁
5. 飞控解锁成功后,飞行器电机会开始转动,此时缓慢推动油门,飞行器会起飞,油门处
于中点值表示定高,当稳定在 1 米左右,此时处于定高模式,飞行器高度不会变化,但
是可能会前后左右漂移
6. 等待 2~3 秒,此时将飞行模式设置为 Loiter(悬停)模式,那么飞行器立刻进入悬停模
式,则可以看到飞行器稳定的悬停。
注意:有可能出现的情况是,从定高模式切换至悬停模式时,飞行器并未悬停而是仍然
处于定高模式,这是因为飞控还未成功初始化定点模式数据,用户就启用悬停模式,此
时,只需要将模式切换至定高模式等待 2~3 秒,再切换至悬停模式,飞行器就会稳定处
于悬停模式
九:其他说明
1. 在使用固件版本为 V3.3 时,使用视觉定位时,只适合低空飞行,如飞行至超出高度范
围(理论 3.5 米),高度数据会失效,切记!
2. 在使用固件版本为 V3.4 时,使用视觉定位时,理论上,定位最高为摄像头能看清的高
度(理论 30-40 米),实际测试 10 米范围是稳定的,再高则看不清飞行器的状态,高度大于
3.5 米飞控会自动使用气压计定高,为安全考虑,请将飞行器控制在可视范围内!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号