

1 直接驱动
180度塑料蓝色舵机
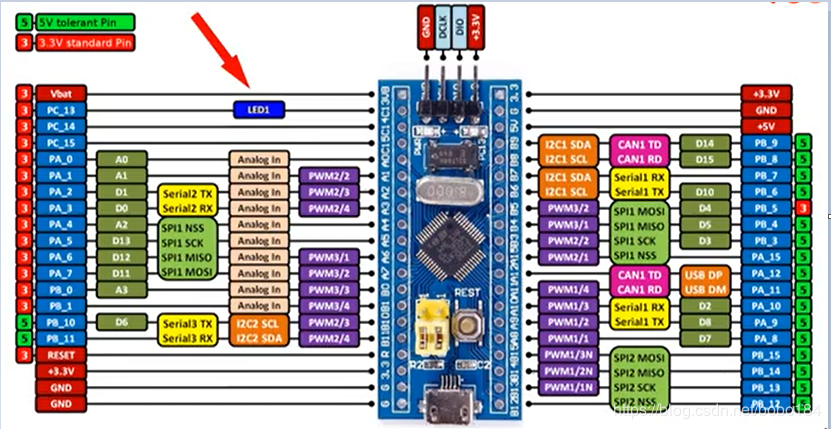
pb11不能用
#include <Servo.h>
Servo myservo; // 定义Servo对象来控制
void setup() {
myservo.attach(PA7); // 控制线连接数字9
}
void loop() {
myservo.write(90);
delay(3000);
myservo.write(0);
delay(3000);
}
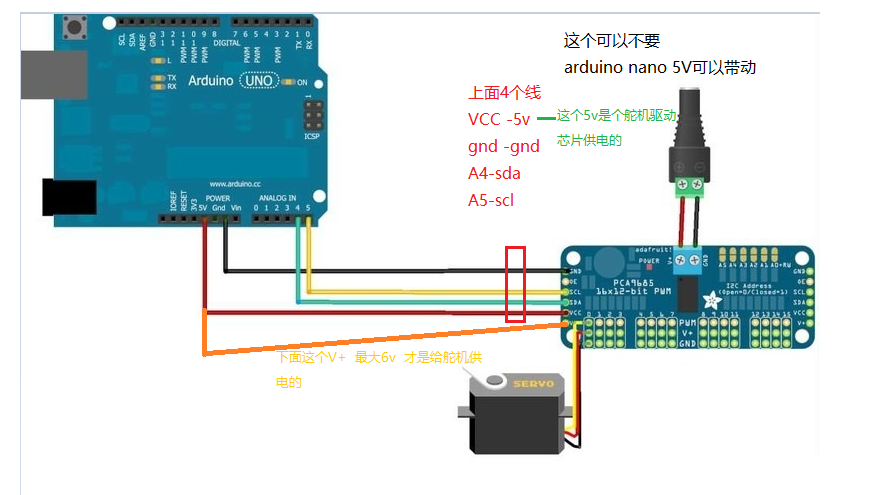
2间接驱动、

2-1接线
B6 是 SCL,B7 是 SDA。
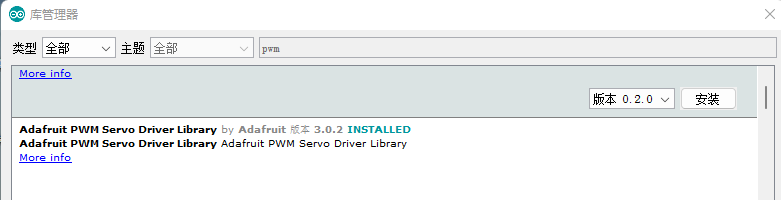
2-2 装库
Adafruit_PWMServoDriver
2-3 测试代码
1 自动扫描转动
/***************************************************
This is an example for our Adafruit 16-channel PWM & Servo driver
Servo test - this will drive 8 servos, one after the other on the
first 8 pins of the PCA9685
Pick one up today in the adafruit shop!
------> http://www.adafruit.com/products/815
These drivers use I2C to communicate, 2 pins are required to
interface.
Adafruit invests time and resources providing this open source code,
please support Adafruit and open-source hardware by purchasing
products from Adafruit!
Written by Limor Fried/Ladyada for Adafruit Industries.
BSD license, all text above must be included in any redistribution
****************************************************/
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
// called this way, it uses the default address 0x40
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
// you can also call it with a different address you want
//Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x41);
// you can also call it with a different address and I2C interface
//Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x40, Wire);
//根据您的伺服品牌,最小和最大脉冲宽度可能会有所不同 调整它
#define SERVOMIN 150 // This is the 'minimum' pulse length count (out of 4096)
#define SERVOMAX 600 // This is the 'maximum' pulse length count (out of 4096)
#define SERVO_FREQ 50 // Analog servos run at ~50 Hz updates
// our servo # counter
uint8_t servonum = 0;
void setup() {
Serial.begin(9600);
Serial.println("8 channel Servo test!");
pwm.begin();
//理论上内部振荡器是25MHz,但实际上不是
//非常精确。你可以调整这个数字直到
//你得到了你期望的频率!
pwm.setOscillatorFrequency(27000000); // The int.osc. is closer to 27MHz
pwm.setPWMFreq(SERVO_FREQ); // Analog servos run at ~50 Hz updates
delay(10);
}
void loop() {
Serial.println(servonum);
for (uint16_t pulselen = SERVOMIN; pulselen < SERVOMAX; pulselen++) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
for (uint16_t pulselen = SERVOMAX; pulselen > SERVOMIN; pulselen--) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
servonum++;
if (servonum > 3) servonum = 0; // Testing the first 8 servo channels
}
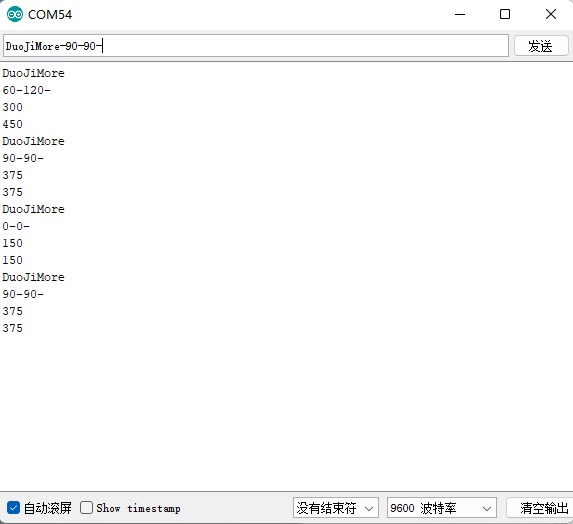
2 串口接收测试
//--------------------舵机初始化开始-----------------
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
// called this way, it uses the default address 0x40
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
//根据您的伺服品牌,最小和最大脉冲宽度可能会有所不同 调整它
//底部舵机-0号口-水平旋转
#define SERVOMIN1 150 //150 // 对应0度
#define SERVOMAX1 600 //150 // 对应180度
//底部舵机-1号口-俯仰旋转
#define SERVOMIN2 150//150 // 对应0度
#define SERVOMAX2 600//600 // 对应180度
#define SERVO_FREQ 50 // Analog servos run at ~50 Hz updates
int curent_d1=90;
int curent_d2=90;
void servo_int()
{
pwm.begin();
//理论上内部振荡器是25MHz,但实际上不是非常精确。你可以调整这个数字直到
//你得到了你期望的频率!
pwm.setOscillatorFrequency(27000000); // The int.osc. is closer to 27MHz
pwm.setPWMFreq(SERVO_FREQ); // Analog servos run at ~50 Hz updates
pwm.setPWM(0, 0, int((SERVOMAX1+SERVOMIN1)/2));// 初始化90度
delay(50);
pwm.setPWM(1, 0, int((SERVOMAX2+SERVOMIN2)/2));//初始化90度
delay(50);
}
//控制引脚号servonum的舵机
// 0-180 dushu/180*(SERVOMAX-SERVOMIN)
//pwm.setPWM(servonum, 0, pulselen);
//--------------------舵机初始化结束-----------------
String comdata = "";
/*
分割字符串-获取数据类型+数据
数据格式: 名字-数据(混合数据);(分号结尾)
普通灯 开 NomLED-on; 关 NomLED-off;
1个舵机 开 DuoJi-90;(数据范围0-180)
控制个舵机
模式1 直接过去 开 DuoJiMore-90-90;(数据范围0-180)
模式2 每一度循环过去 DuoJifor-90-90;
*/
int speeed=20;
void Fenge(String str){
int index = str.indexOf('-');
String sensor_class=str.substring(0, index);
Serial.println(sensor_class);
String sensor_data=str.substring(index + 1, str.length());
Serial.println(sensor_data);
// DuoJiMore-90-90- DuoJiMore-0-0-
if(sensor_class=="DuoJiMore"){
if (sensor_data){
int nindex = sensor_data.indexOf('-');
String data1=sensor_data.substring(0, nindex);
sensor_data=sensor_data.substring(nindex + 1, sensor_data.length());
nindex = sensor_data.indexOf('-');
String data2=sensor_data.substring(0, nindex);
//String data3=sensor_data.substring(nindex + 1, sensor_data.length());
//Serial.println(data1.toInt());
//Serial.println(data2.toInt());
//Serial.println(data3.toInt());
int s1=int(float(data1.toInt())/180.0*float(SERVOMAX1-SERVOMIN1))+SERVOMIN1;
int s2=int(float(data2.toInt())/180.0*float(SERVOMAX2-SERVOMIN2))+SERVOMIN2;
//int s3=int(data3.toInt()/180*(SERVOMAX-SERVOMIN));
Serial.println(s1);
Serial.println(s2);
pwm.setPWM(0, 0, s1);
delay(50);
pwm.setPWM(1, 0, s2);
delay(50);
}
}
}
void setup() {
Serial.begin(9600);
while(Serial.read()>= 0){} //clear serialbuffer
servo_int();//舵级初始化
}
void loop() {
if(Serial.available()>0){
//delay(1);
comdata = Serial.readStringUntil(';');
//Serial.println(comdata);
Fenge(comdata);
}
comdata = "";
}
3 双舵机 液晶屏 称重机


//--------------------舵机初始化开始-----------------
#include <Wire.h>
#include <Arduino.h>
#include <U8g2lib.h>
U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, /* clock=*/ PB8, /* data=*/ PB9, /* reset=*/ U8X8_PIN_NONE);
int i=0;
void u8g2_sendStrint(int x,int y,String &msg){
int c_length=msg.length();
if(c_length==0)c_length=20;
char send_char[c_length];
//char send_char[20]="0";
strcpy(send_char, msg.c_str());
u8g2.drawStr(x,y,send_char); // 绘制字符串
}
// 重力
#include "HX711.h"
// HX711 circuit wiring
const int LOADCELL_DOUT_PIN = PB1;
const int LOADCELL_SCK_PIN = PB10;
HX711 scale;
#include <Adafruit_PWMServoDriver.h>
// called this way, it uses the default address 0x40
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
//根据您的伺服品牌,最小和最大脉冲宽度可能会有所不同 调整它
//底部舵机-0号口-水平旋转
#define SERVOMIN1 100 //150 // 对应0度
#define SERVOMAX1 500 //150 // 对应180度
//底部舵机-1号口-俯仰旋转
#define SERVOMIN2 150//150 // 对应0度
#define SERVOMAX2 600//600 // 对应180度
#define SERVO_FREQ 50 // Analog servos run at ~50 Hz updates
int curent_d1=90;
int curent_d2=90;
void servo_int()
{
pwm.begin();
//理论上内部振荡器是25MHz,但实际上不是非常精确。你可以调整这个数字直到
//你得到了你期望的频率!
pwm.setOscillatorFrequency(27000000); // The int.osc. is closer to 27MHz
pwm.setPWMFreq(SERVO_FREQ); // Analog servos run at ~50 Hz updates
pwm.setPWM(0, 0, int((SERVOMAX1+SERVOMIN1)/2));// 初始化90度
delay(50);
pwm.setPWM(1, 0, int((SERVOMAX2+SERVOMIN2)/2));//初始化90度
delay(50);
}
//控制引脚号servonum的舵机
// 0-180 dushu/180*(SERVOMAX-SERVOMIN)
//pwm.setPWM(servonum, 0, pulselen);
//--------------------舵机初始化结束-----------------
String comdata = "";
int speeed=20;
void Fenge(String str){
int index = str.indexOf('-');
String sensor_class=str.substring(0, index);
// Serial.println(sensor_class);
String sensor_data=str.substring(index + 1, str.length());
// Serial.println(sensor_data);
// Fenge DuoJiMore-90-90-; DuoJiMore-0-0-;
if(sensor_class=="DuoJiMore"){
if (sensor_data){
int nindex = sensor_data.indexOf('-');
String data1=sensor_data.substring(0, nindex);
sensor_data=sensor_data.substring(nindex + 1, sensor_data.length());
nindex = sensor_data.indexOf('-');
String data2=sensor_data.substring(0, nindex);
//String data3=sensor_data.substring(nindex + 1, sensor_data.length());
//Serial.println(data1.toInt());
//Serial.println(data2.toInt());
//Serial.println(data3.toInt());
int s1=int(float(data1.toInt())/180.0*float(SERVOMAX1-SERVOMIN1))+SERVOMIN1;
int s2=int(float(data2.toInt())/180.0*float(SERVOMAX2-SERVOMIN2))+SERVOMIN2;
//int s3=int(data3.toInt()/180*(SERVOMAX-SERVOMIN));
//Serial.println(s1);
// Serial.println(s2);
pwm.setPWM(0, 0, s1);
delay(50);
pwm.setPWM(1, 0, s2);
delay(50);
}
}
}
String msg="11";
void setup() {
Serial.begin(9600);
while(Serial.read()>= 0){} //clear serialbuffer
servo_int();//舵级初始化
u8g2.begin();// 屏幕初始化
scale.begin(LOADCELL_DOUT_PIN, LOADCELL_SCK_PIN);
scale.set_scale(2280.f); // this value is obtained by calibrating the scale with known weights; see the README for details
scale.tare(); // reset the scale to 0
}
int weight=0;
String weight_s="000";
String class_="000";
int dgree_zuoyou=0;
String dgree_zuoyou_="000";
void loop() {
if(Serial.available()>0){
//delay(1);
comdata = Serial.readStringUntil(';');
//Serial.println(comdata);
//comdata="DuoJiMore-"+String(i)+"-"+String(i)+"-;";
Fenge(comdata);
}
weight=int(scale.get_units(10));
if(weight<2)
{
weight_s=String(weight);
class_="0";
dgree_zuoyou=0;
dgree_zuoyou_=String(dgree_zuoyou);
}
else if(weight<10 && weight>2 ){// 酒精
weight_s=String(weight);
class_="1";
dgree_zuoyou=0;
dgree_zuoyou_=String(dgree_zuoyou);
}
else if(weight<30 && weight>=10)// 可乐
{
class_="2";
weight_s=String(weight);
dgree_zuoyou=90;
dgree_zuoyou_=String(dgree_zuoyou);
}
else if( weight>=30)// 玻璃杯满
{
class_="3";
weight_s=String(weight);
dgree_zuoyou=180;
dgree_zuoyou_=String(dgree_zuoyou);
}
Serial.print("分类结果:\t");
Serial.print(class_);
Serial.print("\t重量结果:\t");
Serial.print(weight_s);
Serial.print("\t分类角度:\t");
Serial.println(dgree_zuoyou_);
i=i+1;
msg="time: "+String(i);
if(i>100)i=0;
u8g2.clearBuffer(); // 清除oled缓存
u8g2.setFont(u8g2_font_ncenB08_tr); // 设置字体
u8g2.drawStr(0,10,"weight: "); // 绘制字符串
u8g2_sendStrint(60,10,weight_s); // 绘制字符串
u8g2.drawStr(0,25,"class:"); // 绘制字符串
u8g2_sendStrint(60,25,class_); // 绘制字符串
u8g2.drawStr(0,35,"dgree:"); // 绘制字符串
u8g2_sendStrint(60,35,dgree_zuoyou_); // 绘制字符串
u8g2_sendStrint(0,45,msg); // 绘制字符串
u8g2.sendBuffer(); // 显示
if(weight<2)
{
Serial.println("没有货物,复位,分类舵机0度,倾倒舵机90度");
comdata="DuoJiMore-"+String(0)+"-90-";
Fenge(comdata);
delay(2000);
}
else{
Serial.print("步骤1-分类舵机-分类-旋转到");Serial.println(dgree_zuoyou_);
comdata="DuoJiMore-"+String(dgree_zuoyou)+"-90-";
Fenge(comdata);
delay(2000);
Serial.println("步骤2-倾倒舵机-倾倒-旋转到0度");
comdata="DuoJiMore-"+String(dgree_zuoyou)+"-0-";
Fenge(comdata);
delay(2000);
Serial.println("步骤3-倾倒舵机-回平-旋转到90度");
comdata="DuoJiMore-"+String(dgree_zuoyou)+"-90-";
Fenge(comdata);
delay(2000);
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号