读Context-Based Parking Slot DetectionWith a Realistic Dataset
读Context-Based Parking Slot DetectionWith a Realistic Dataset
paper
github
贡献 | 模型框架 | 具体实现 | 其他需要注意 | todo
-
贡献
- 提出一种基于上下文的两阶段停车位检测方法;
- 在yolo的基础上,由旋转物体检测器根据旋转角度用旋转锚框框出停车位;
- 新的停车位数据集,新的评估指标;
-
模型框架
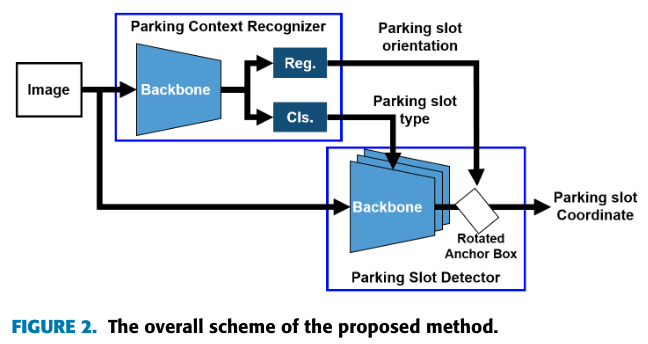
两个部分,上下文识别器(PCR)和停车位检测器(PSD);
上下文识别器:骨架为MobileNetV2,从图片提取车位类型和旋转角度;停车位识别器:骨架为YOLOv3,从图片和类型角度得出最终旋转过的锚框,圈出车位;
-
具体实现
-
PCR: 输入图像经MobileNetV2,从回归分支得锚框旋转角度,从分类分支得车位种类;输入图像被分为四类之一:平行、垂直、对角线、或非停车空间;由停车位分隔线得估计角度;每张图片只会被分为其中一类,因为相邻停车位有相同方向和类型。
-
PSD: 上述三类图各对应一个检测器,分别估计停车位的四个顶点的坐标,其中检测的锚框会旋转 PCR 估计的角度。
-
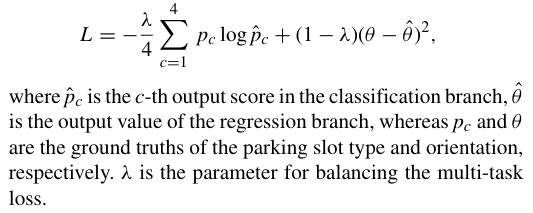
损失函数
![PCRLoss]()
包含分类损失和回归损失;
旋转非极大抑制(rotated non-maximum suppression),不太明白啊 -
数据集
包含图片,类型,方向角度值及顶点坐标;
按照场景分类,训练更高效;
相比ps2.0,不同亮度情况多,不同大小车位多,包含更多种类的样本ps2.0中所不包含的; -
评价指标
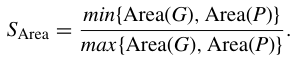
并不使用IoU作为评价指标(即使不同情况也有相同IoU),提出新评价指标停车分数S=SArea*SLoc(面积的估计精度和位置估计精度)。其中G为真值,P为预测值,P‘为G与P的交集。
![Sarea]()
趋近于1,表示预测面积和真实面积趋同;
![Sloc]()

趋近于1,表示预测的都在真实的里面;
相比IoU,S能够适配不同的车辆尺寸和停车位尺寸,更适用于工程算法开发。
-
其他需要注意
传统方法
- 基于线的方法:找两条间隔开的分隔线;
- 基于角点的方法:先检测入口线与分割线相交角点,再结合角点坐标检测停车位;
-
todo

 浙公网安备 33010602011771号
浙公网安备 33010602011771号