MBD笔记:PWM与DC-DC变换器的模型设计
功率器件与PWM控制基础
功率器件基础
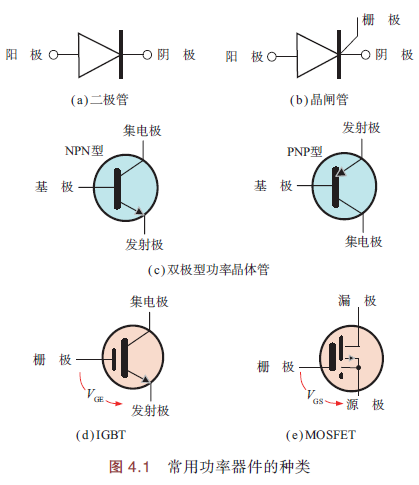
常用功率器件的电路符号:
功能:
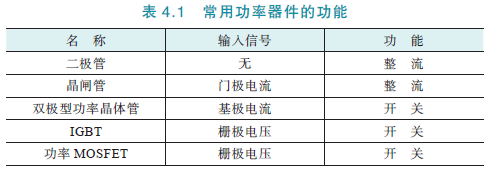
- 二极管、晶闸管
都具有单向导通性,电流从阳极流向阴极. 两者都属于整流器件,在将交流电压转换直流电压的AC-DC变换器中很常见.
区别:晶闸管通过门极控制阳极——阴极导通,门极电流也流入阴极
- 双极型功率晶体管、IGBT、功率MOSFET
都属于开关器件,分别通过控制基极电流和栅极电压来实现开关操作,在将直流电压转换为交流电压的DC-AC逆变器中很常见.
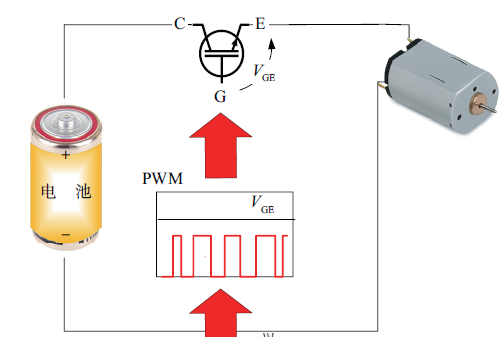
电机调速
如下图,开关接通,1.5V电压全加在电机上,电机全速运转. 如果电源变成可调电压,就能控制电机转速.
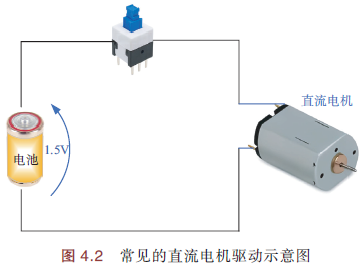
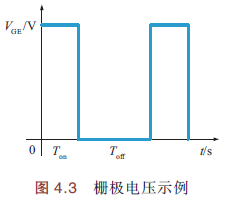
于是,想到用开关器件实现开关电源,从而控制电源电压. 控制开关器件的典型输入信号如下图,是固定周期的脉冲电流(电压). 通过调整脉冲宽度,来控制开关时长(占空比)的方式,称为PWM(pulse width modulation,脉冲宽度调制)控制
设计PWM信号模型
如何设计模型,生成PWM信号呢?
一个周期内,PWM由高电平、低电平两部分组成.
输出PWM信号,根据输入的锯齿波(Saw)信号的电压变化,生成原理如下图,周期\(T=T_{on}+T_{off}\).

- Saw信号电压 < 阈值时,输出高电平(\(V_{GE}=1\));
- Saw信号电压 >= 阈值时,输出低电平(\(V_{GE}=0\))
注:栅极(Gate,G),发射机(Emitter,E),集电极(Collector,C)
模型设计
文件名:pwmSignal.slx
所用模块:
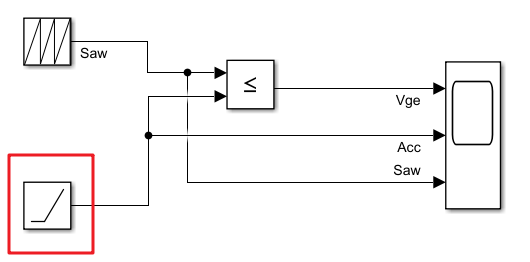
仿真模型:
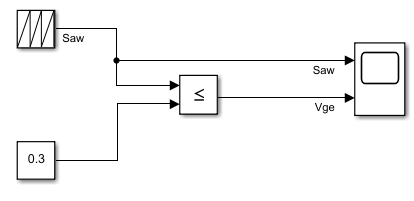
其中,Constant为3,停止时间0.1s
- Repeating Sequence模块生成锯齿波
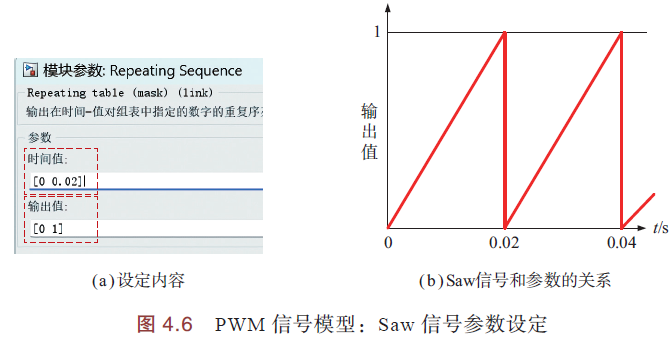
- Repeating Sequence 模块参数:
1)时间值:指定生成锯齿波信号的周期. [0 0.02] 表示反复输出0~0.02s的信号,即频率为1/0.02=50Hz
2)输出值:指定上述周期内对应的值. [0 1] 表示每个周期的0s时值为0,0.02s时值为1
Relational Operator 模块比较2个信号,比较结果以bool值输出:true,输出高电平;false,输出低电平. 布尔值作为IGBT等器件电压\(V_{GE}\)时,必须转换为实数(可用Simulink-PS Converter).
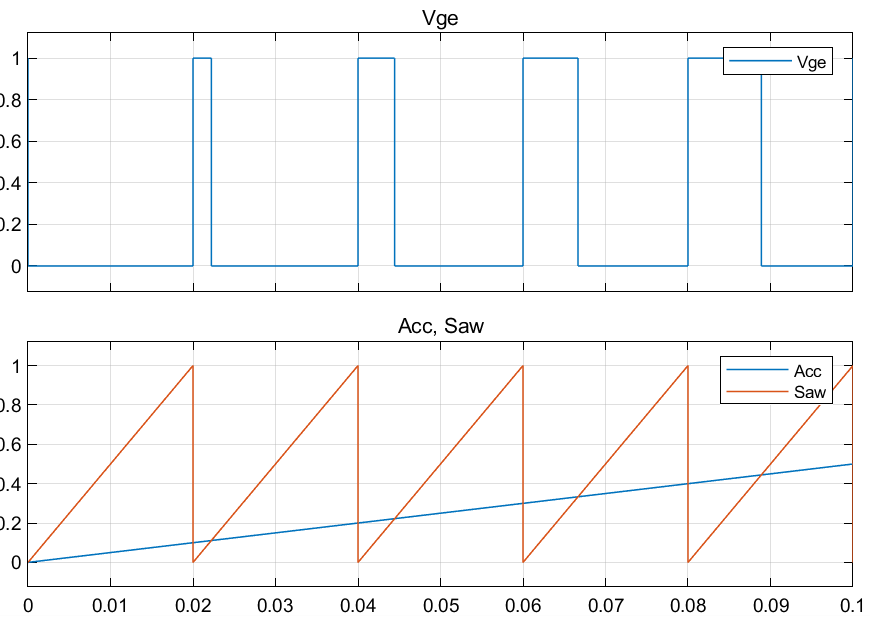
仿真结果:
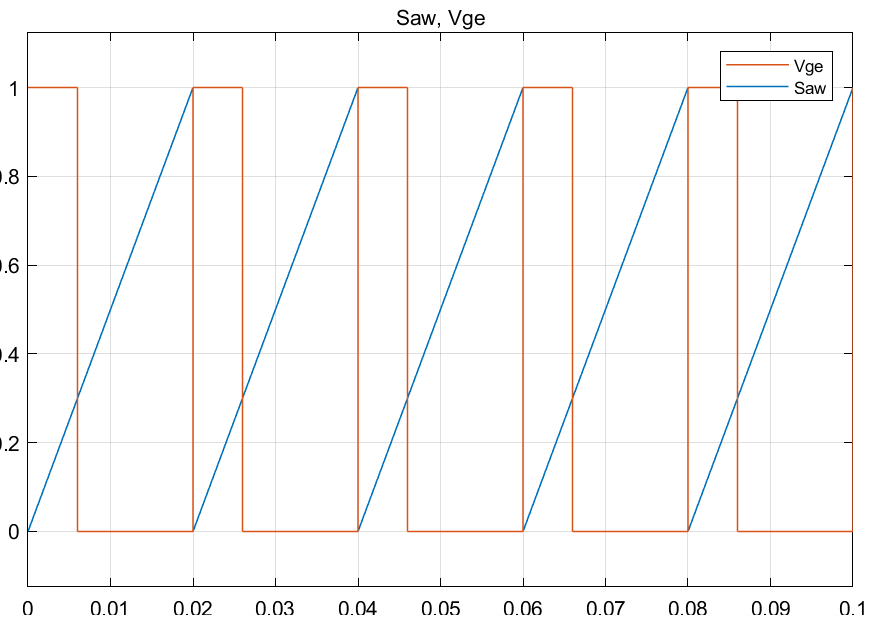
可以看到,Saw输出值 < 0.3时,Relational Operator 输出0;Saw输出值 > 0.3时,Relational Operator输出1
于是,阈值0.3将周期0.02s分为2个部分:
1)\(T_{on}\):导通时间,占30%,0.02x30%=0.006s;
2)\(T_{off}\):截止时间,占70%,0.02x70%=0.014s
使得PWM占空比可调
如何使得电机转速缓慢提高,
可根据电位器开度调节PWM的占空比,让\(T_{on}\)占比逐渐增大,\(T_{off}\)占比逐渐减小,从而平均电压逐渐增大.
模型设计
文件名:pwmSignalAcc.slx
上一节通过锯齿波Saw与常数0.3比较,得到恒定占空比PWM信号;这里,可将常数换成斜坡信号(Ramp模块生成).
仿真模型:
其中,Ramp模块斜率设为5;停止时间0.1s
仿真结果:
Saw信号 < Ramp信号时,生成1;
Saw信号 > Ramp信号时,生成0.
而Ramp信号随时间线性递增,斜率5,所以每个周期的占空比随时间线性递增
降压型变换器
使用PWM信号输入模型,对DC-DC变换器建模
占空比50%
PWM信号高电平、低电平时间相等.
如果以时间\(t(s)\)为横轴,设周期\(T(s)\),占空比D,输入电压\(V_{in}(t)\),幅值\(V_{in}\),那么平均输出电压:
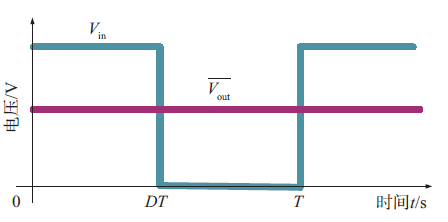
占空比D=50%时,\(V_{out}=DV_{in}=0.5V_{in}\)
工作原理
降压型变换器,又称Buck变换器,是一种基于电感储能原理的DC-DC变换器.
通过调整输入信号(PWM)占空比,控制开关器件的通断,从而将输入的直流电压转换为可调的低电压输出,满足不同电路需求.
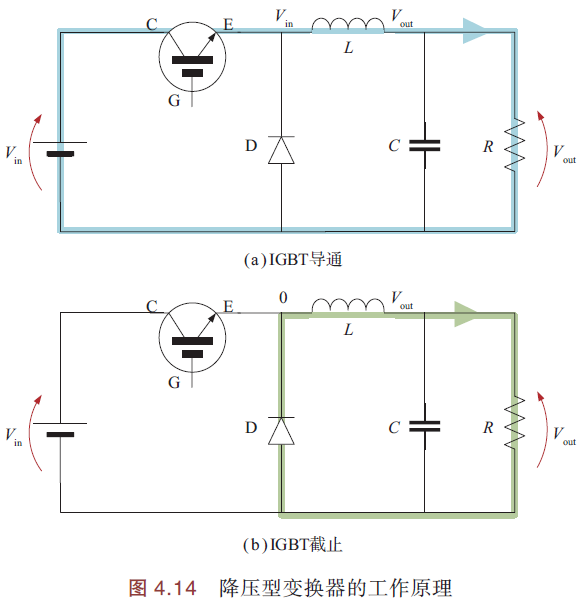
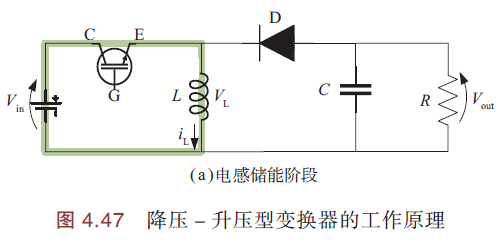
工作原理如下图:
当IGBT导通时,电流通过电感,电感储能;
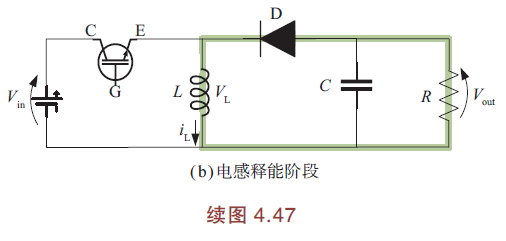
当IGBT截止时,电感释放能量,持续向负载供电,电容起到平滑输出电压的作用.
为了确保输出电压稳定,通常需要对输出电压采样,反馈给MCU,实时调节PWM占空比,精确控制器件的通断时间.
IGBT导通、截止时电压积分:
IGBT导通时,\(T_{on}=DT\),二极管截止,电感L左端电压 \(V_{in}\)(忽略IGBT内阻)、右端电压 \(V_{out}\)(=施加到R两端电压),\(V_L=V_{in}-V_{out}\),电感的电压积分\(DT(V_{in}-V_{out})\)
IGBT截止时,\(T_{off}=T-DT\),二极管导通(L释放能量续流),L左端电压0(忽略二极管内阻)、右端电压\(V_{out}\)(=施加到R两端电压),\(V_L=0-V_{out}=-V_{out}\)
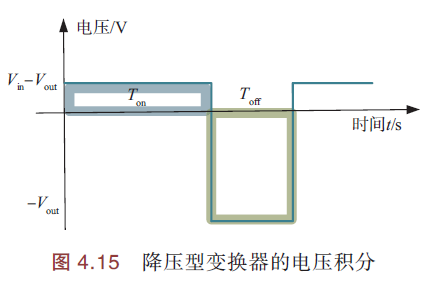
根据伏秒平衡原理,稳态条件下电感两端电压在一个开关周期内的积分为0. 所以,在周期T内,电感的电压积分为0. 有
伏秒原理:
伏秒平衡原理:处于稳定状态的电感,开关导通时间(电流上升段)的伏秒数须与开关关断(电流下降段)时的伏秒数在数值上相等,尽管两者符号相反.
模型设计
文件名:buckConverter.slx
所用模块:

仿真模型:
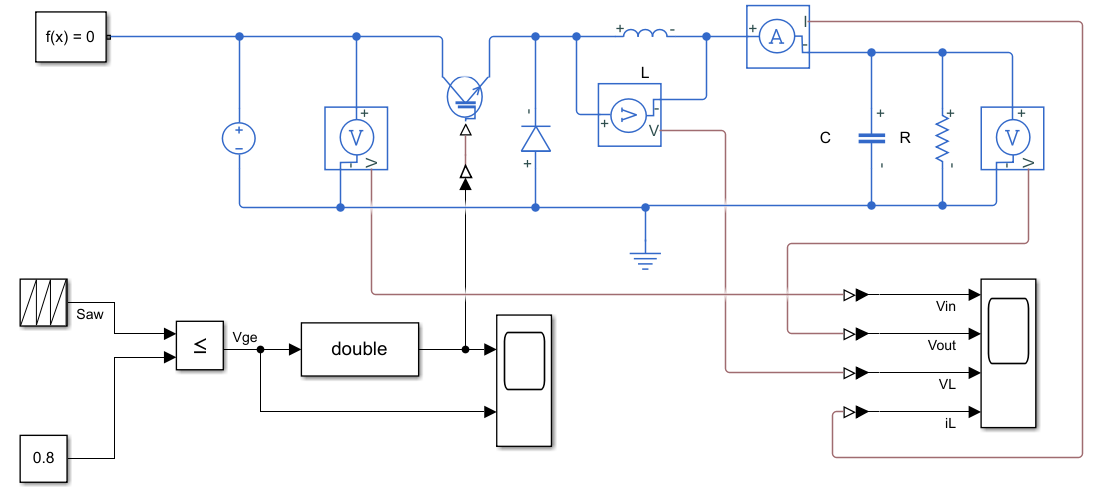
其中,
- 信号转换器的输出类型设置为double,这是因为IGBT模块要求输入为double类型;
- 直流电源设为12V;
- 电感L电感值1e-3H;
- 电容C电容值1e-3F;
- 电阻R电阻值10Ω;
- IGBT正向电压0.5V,阈值电压0.5V(实际应用中IGBT阈值电压较高);
- 模型设置:PWM频率设为5000Hz. 为观测10倍频率时电感中电流,设置全局最大步长为1/50000 s;
- 停止时间0.1s;
- Repeating Sequence 模块(生成锯齿波) 时间值设为[0 0.0002](对应PWM频率5000Hz),输出值设定[0 1]
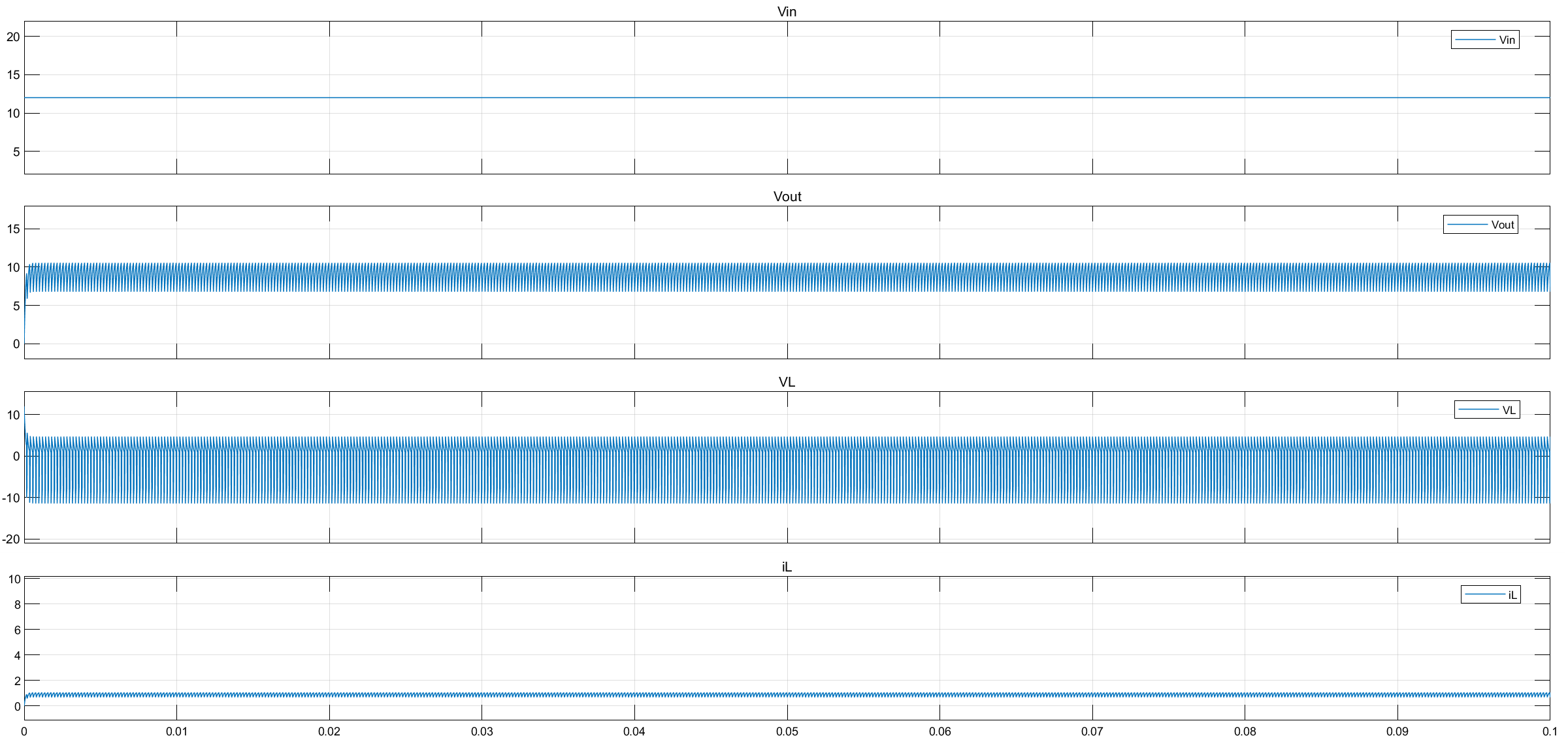
仿真结果:
从上到下,依次\(V_{in}, V_{out}, V_L, i_L\)

下面确认这4个信号,其测量值是否与理论值一致.
- 输入电压\(V_{in}\)
\(V_{in}\)由DC电源生成,应该稳定在12V. 观察示波器波形,是准确的12V电压.

- 输出电压\(V_{out}\)
确认\(V_{out}\)是否为固定值:从开始到0.04s之间,不稳定;0.05s后,固定不变.
理论上,占空比D=80%,\(V_{out}=DV_{in}=0.8*12V=9.6V\);测量值,\(V_{out}\)在9.021V~9.03V之间,与理论值相差不大(因为没有算IGBT压降).

- 电感低压\(V_L\)
储能阶段(理论值):
测量值:测量点1、2分别设置在\(V_L\)波形上升沿、下降沿. 测量点1电压值2.47V,与理论值接近.
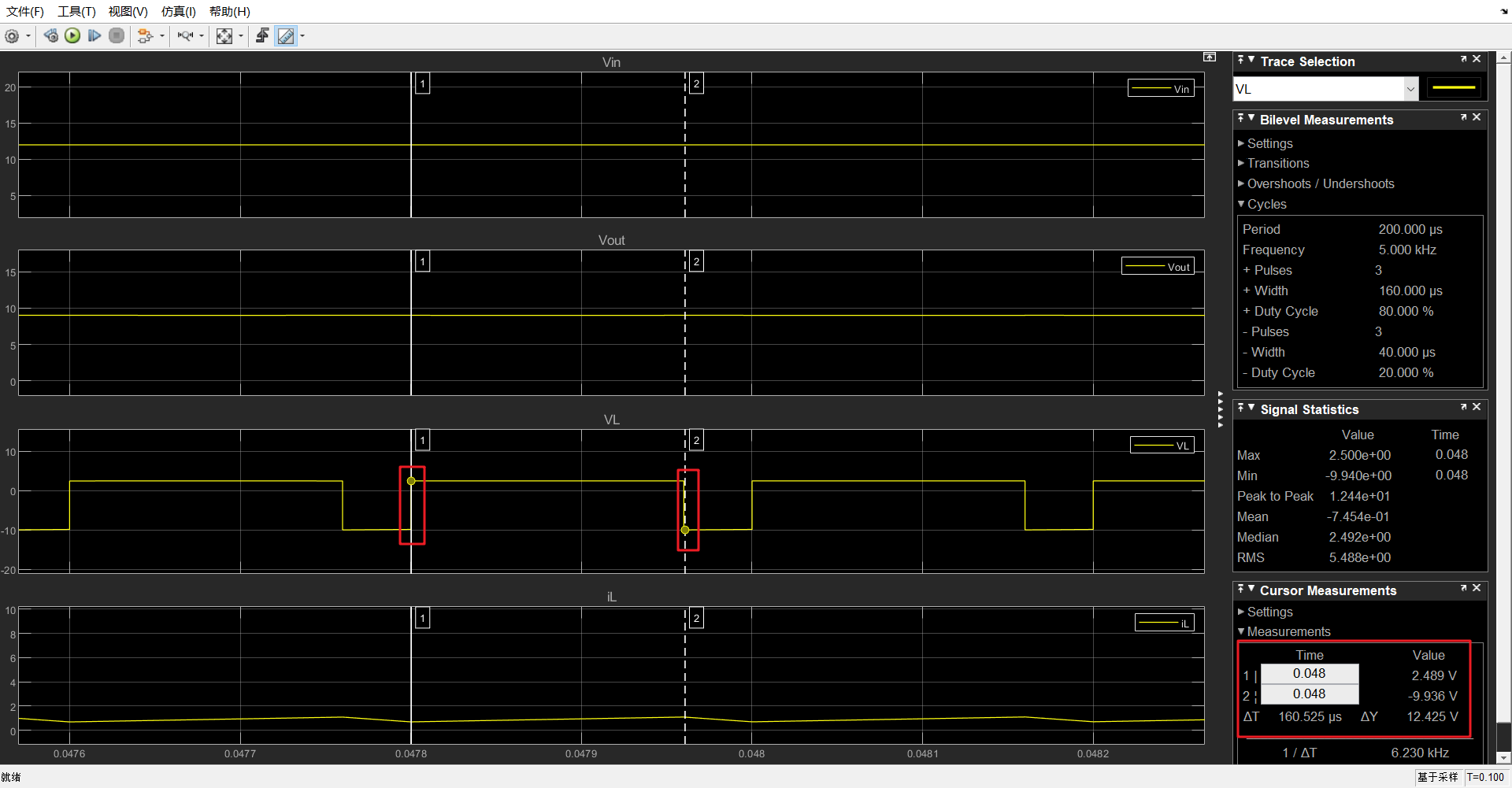
理论值:频率5kHz,周期T=1/5000,高电平持续时间\(T_{on}=DT=0.8\times 1/5000=160μs\);
测量值:从上图可知,ΔT=160.525μs,与理论值接近.
释能阶段(理论值):
测量值:测量点2电压值-9.936V,与理论值接近.
释能阶段时间:\(T_{off}=T-T_{on}=40μ\)
下面验证 伏秒平衡原理,即整个周期电感的电压积分为0.
- 电感电流\(i_L\)
对电感加方波电压\(V_L\),电流波形\(i_L\)如下图所示锯齿状:
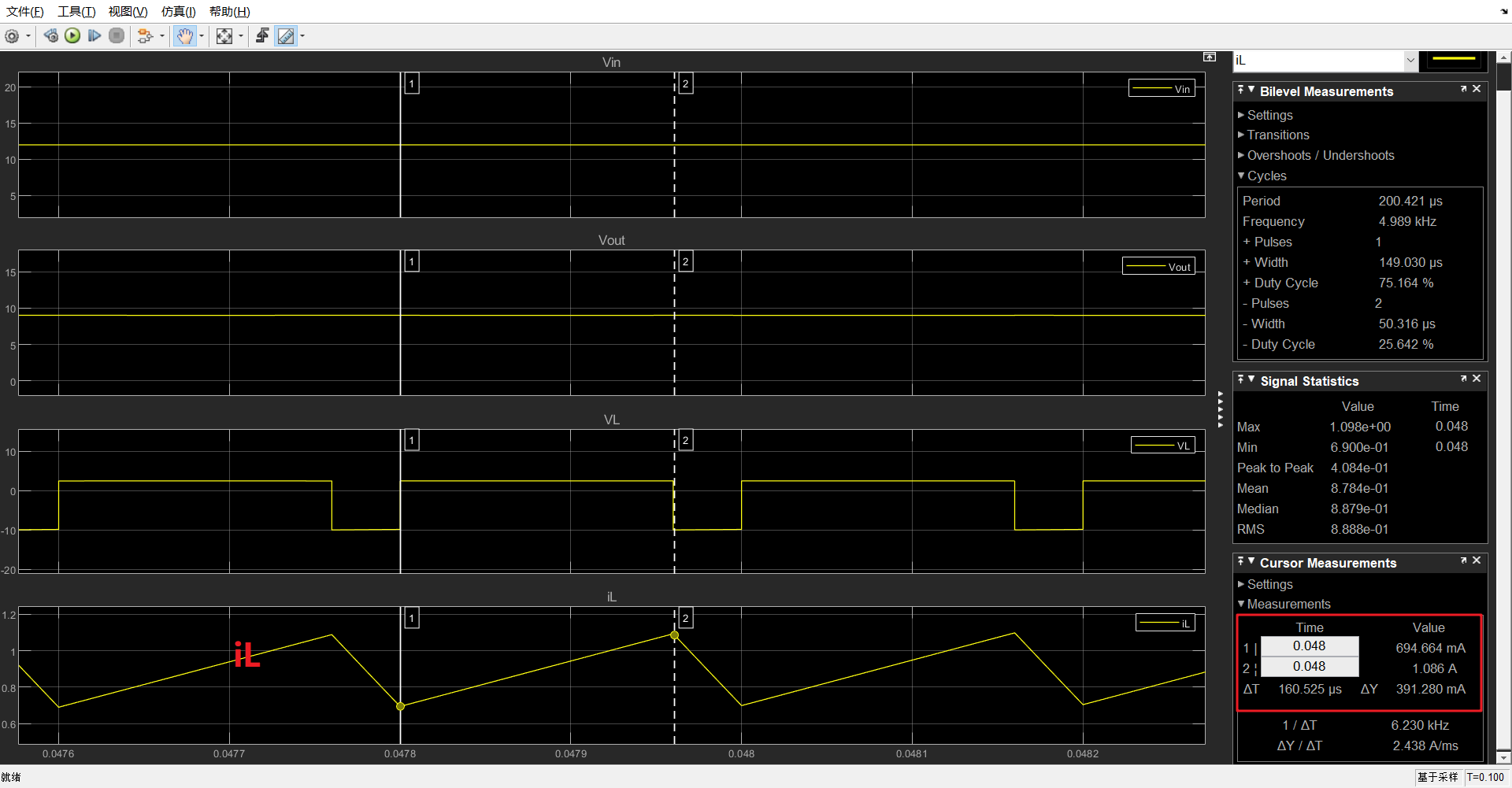
下面解释为何\(i_L\)为锯齿状.
根据电感定义,有\(V_L(t)=L\frac{di_L(t)}{dt}\),两边对t求积分,
∵\(V_L(t)\)是方波,\(T_{on},T_{off}\)不变
∴
其中,\(I_{L0}\)初始电流.
\(i_L(t)\)是以t为变量、斜率\(α=V_L/L\)、截距\(β=I_{L0}\)的一次函数,图像为一条直线(分储能阶段、释能阶段).
电感储能阶段:\(V_L=V_{int}-V_{out},V_{int}\ge V_{out}\),
∴\(V_L\ge 0\implies α=V_L/L\ge 0\),斜率为正
电感释能阶段:\(V_L=-V_{out}<0\),∴\(α=V_L/L<0\implies α<0\),斜率为负
∴电流\(i_L\)波形锯齿状.

- 电容C作用
将上面仿真模型中,电容从1e-3改成1e-9,仿真结果如下:
C=1e-3时,
\(V_{out}\)变化:\(9.03V-9.021V=0.009V\)
C=1e-9F时,
\(V_{out}\)变化:\(10.501V-6.973V=3.528V\)
可见,电容模块起到稳定输出电压\(V_{out}\)的滤波作用.
根据电容阻抗公式,
C=1e-3时,\(Z_C=\frac{1}{2π5000*10^{-3}}=-0.03j(Ω)\)
C=1e-9时,\(Z_C=\frac{1}{2π5000*10^{-9}}=-31.83j(kΩ)\)
放大后观察\(V_{out}\):
C=1e-9
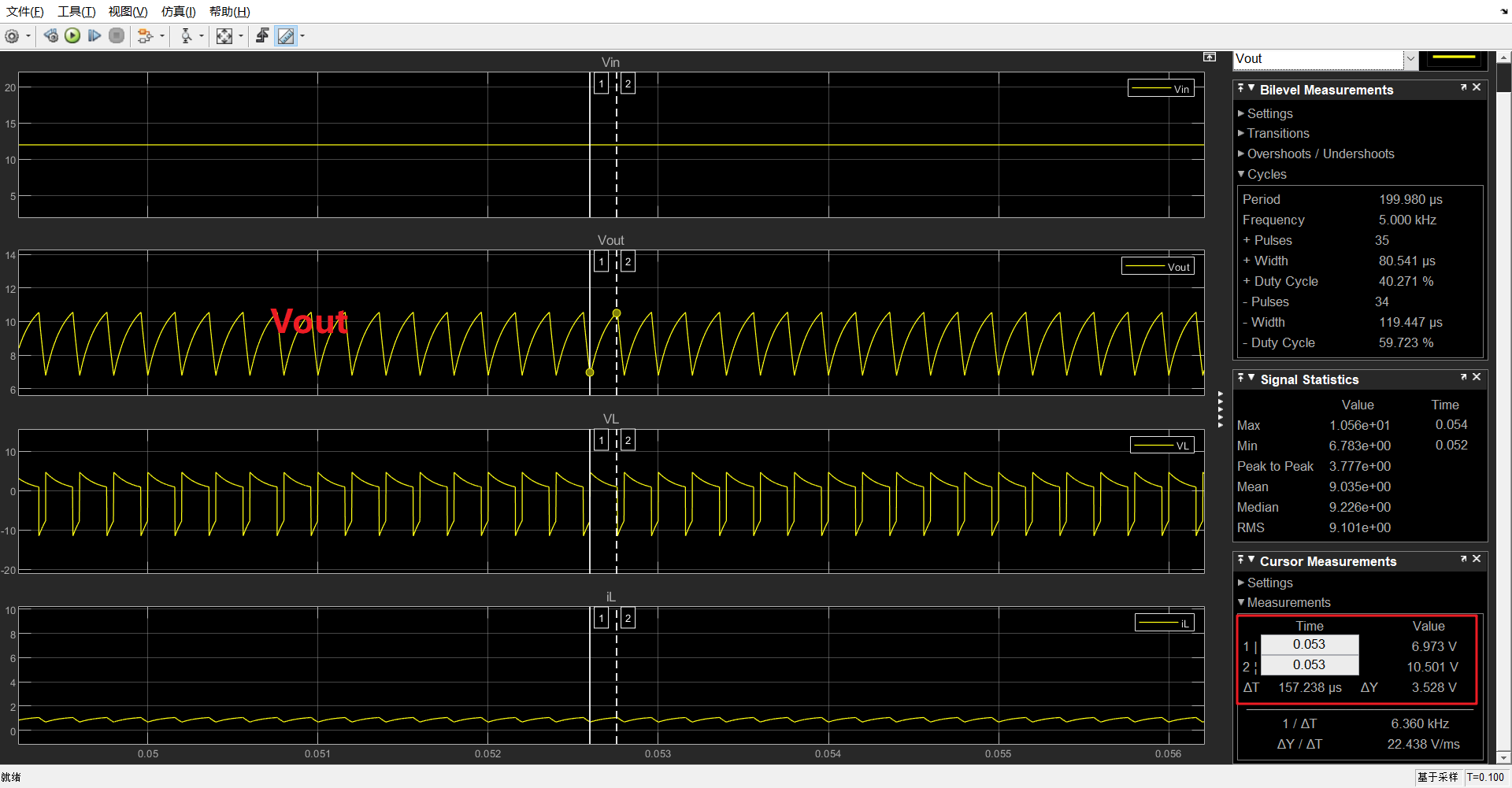
可以发现,电容改小以后,\(V_{out}\)变化更剧烈,此时,电容阻抗更大.
降压型变换器自动控制
前面PWM要么固定不变,要么是固定的锯齿波,能否通过反馈,让模型自动控制PWM输出?
这就是本小节内容.
自动控制基础
降压型变换器人工控制原理:
输出电压的调整是通过比较降压型变换器的输出电压和目标电压,手动旋转调节按钮,使得输出电压值与目标值一致.
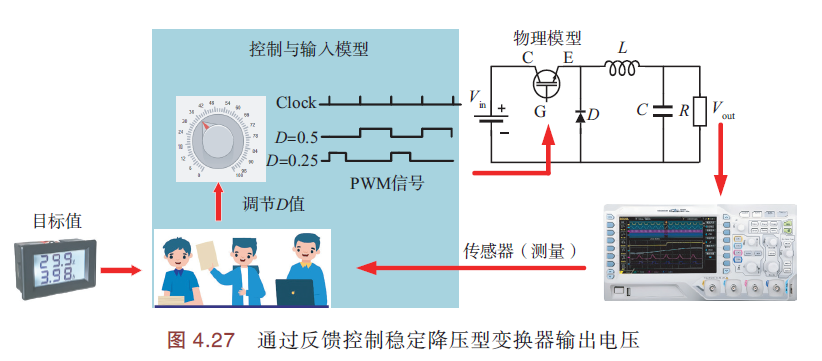
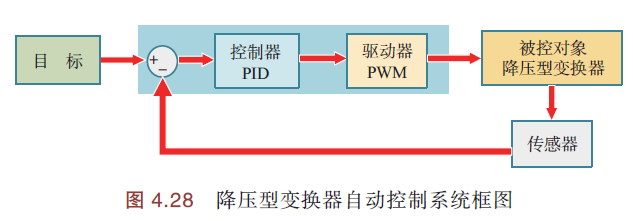
自动控制系统,是用电路代替人工进行自动控制,在控制模型中加入传感器,将传感器当前值与目标值进行比较,然后据此适时调节(占空比D). 系统框图如下:
模型设计
控制系统要求:
- 输入电压:12±4V
- 目标输出电压:5±0.5V(一个周期内平均电压)
文件名:buckConverterCont.slx
在上一节模型基础上,添加所用模块:
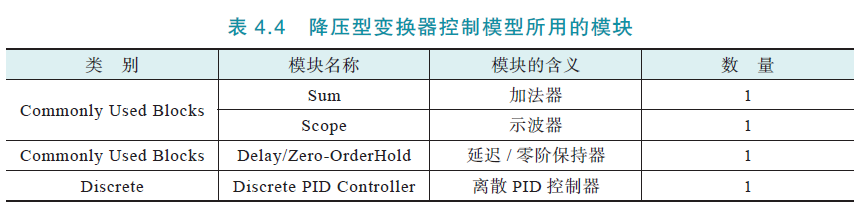
仿真模型:
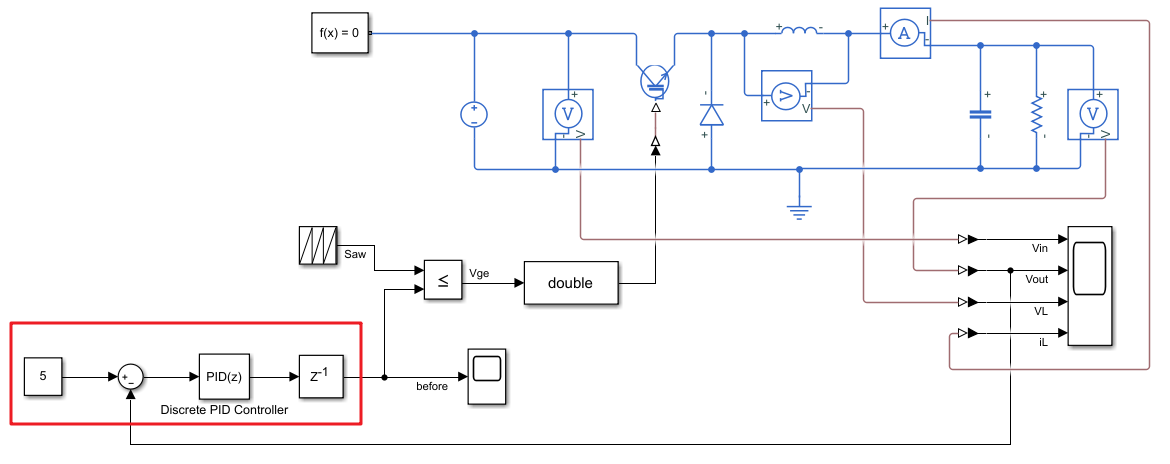
其中,
- Constant为5表示目标输出电压;
- Sum模块用于偏差计算,即error=target-current
- PID控制,采用默认P、I、D系数(P=1,I=1,D=0,其实是PI控制)
- 延迟模块\(z^{-1}\),延迟长度1,初始条件0,采样时间-1(继承全局仿真步长)
仿真步长
仿真不连续,是在离散时间内运行. 离散时间可分为:可变步长、固定步长,如下图:
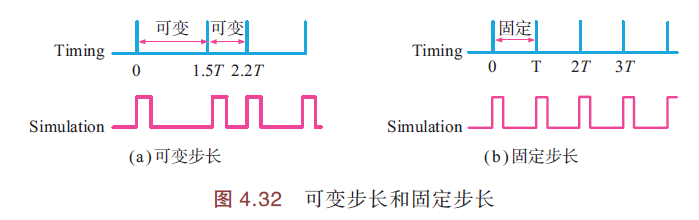
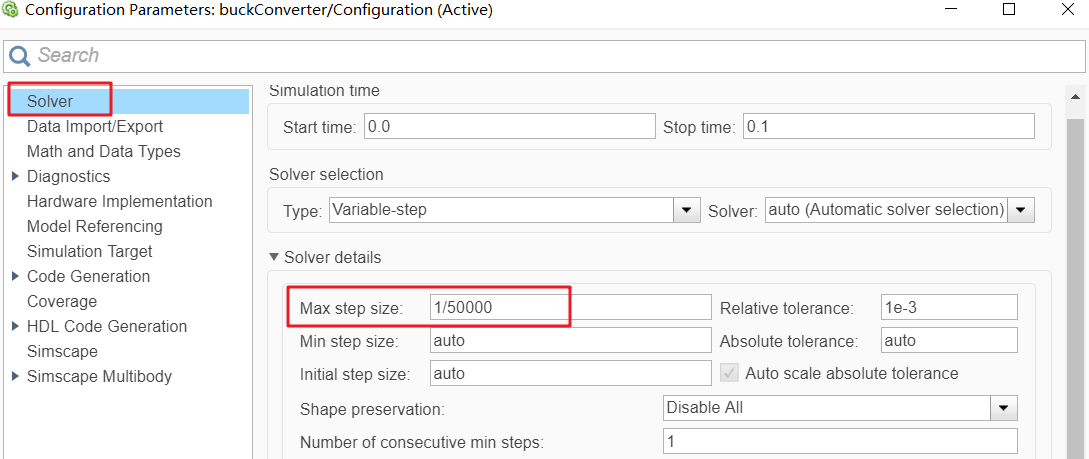
可通过 模型配置参数(F)> 求解器参数设定 ,来设置可变步长、固定步长.
求解器选择的类型是离散时间设置(可变步长 or 固定步长).
求解器详细信息的步长,全设为auto,则全部自动计算仿真运行时间(上图Timing). 高速仿真时,通常指定Timing最大值,或者明确指定固定步长的间隔.
这里我们将求解器类型设为 变步长,最大步长设为 1/50000 s.

代数环问题
创建一个新的模型,来说明代数环问题,以及如何解决.
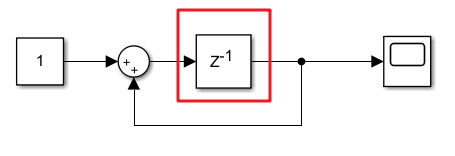
文件名:algebraLoop.slx
所用模块:
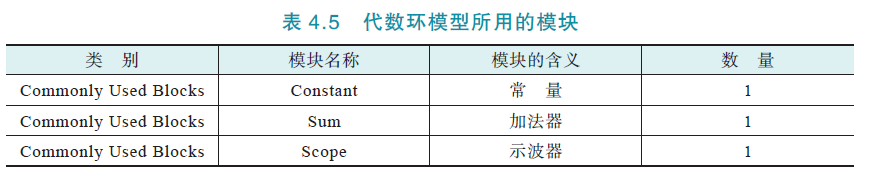
仿真模型:
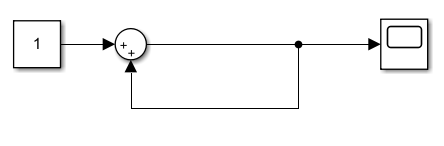
其中,求解器选择 变步长;最大步长 1/50s
如果直接运行,会报错:
大致意思是含有代数环,不能运行
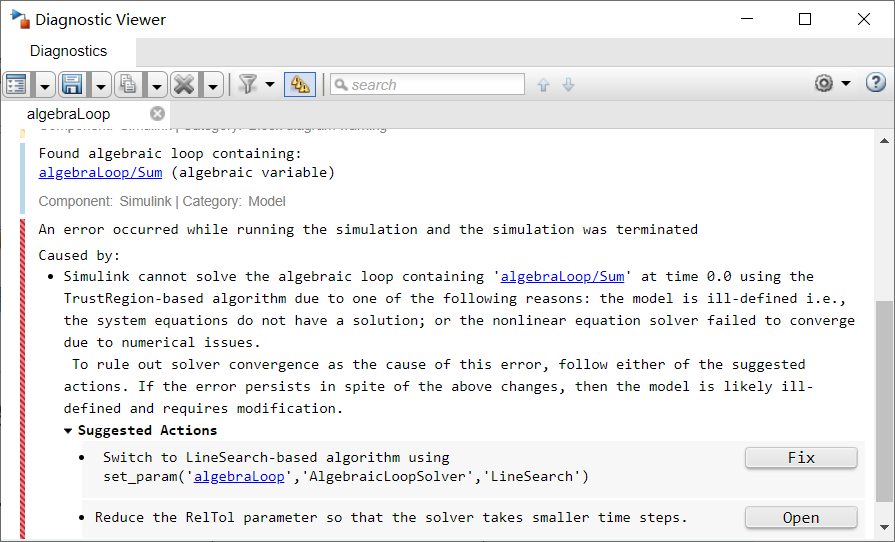
该代数环有2个问题:
1)形成环:加法器输入信号进入了输入端,运算呈环状;
2)初始值:加法结果初始值不确定,仿真刚开始时加法不成立
改善:加入Delay模块,进行延迟,从而消除代数环.
延迟模块参数设置:
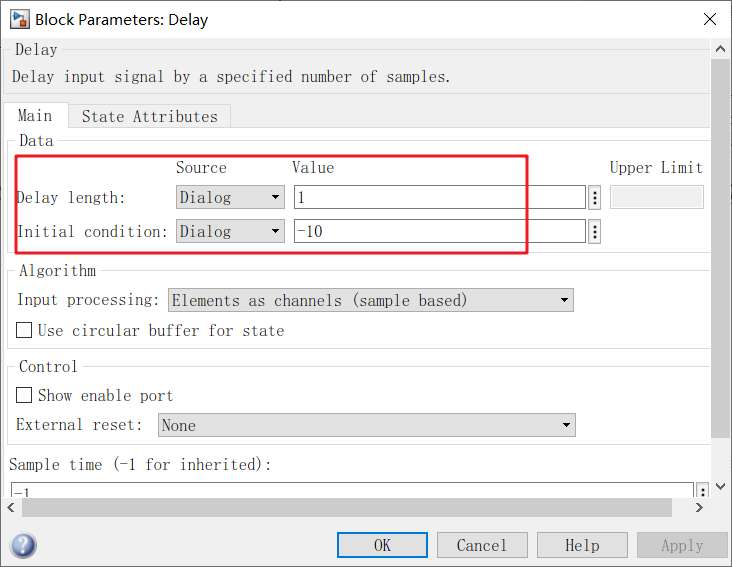
仿真结果:
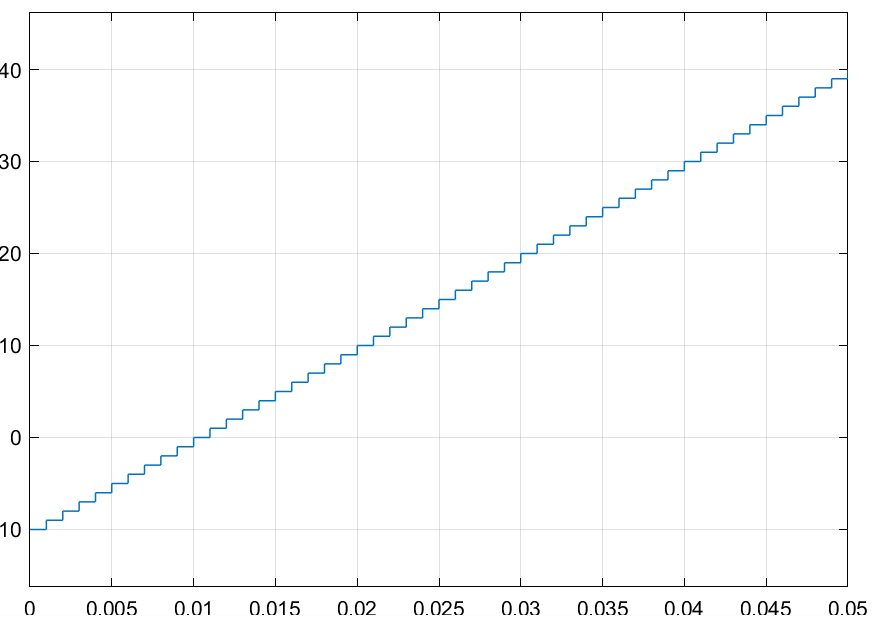
- 计算结果延迟:延迟一个步长,消除代数环
- 初始值:设初始条件-10,解决了初始值不确定问题
最终,buckConverterCont.slx(降压型变换器自动控制模型)的仿真结果:

可以看到,\(V_{out}\)最终趋于稳定,电压值在4.5V~4.6V.
也可以用Simulink/Discrete模块库中零阶保持器(Zero-Order Hold)模块,取代Delay模块,采样时间默认-1,表示继承
确认控制稳固性
之前输入电压一直稳定在12V,当电压变化时,控制模型还能有效工作吗?
下面将DC Voltage Source(直流电压源)替换为可编程电源(Programmable Voltage Source).
设置参数:
- AC voltage peak magnitude:4V
- AC voltage frequency:0.1Hz
- AC voltage phase shift:90deg
- DC voltage:12V
于是,输入电压\(V_{in}\)可表示为:
\(V_{in}\)从16V逐渐减小到8V
仿真模型:
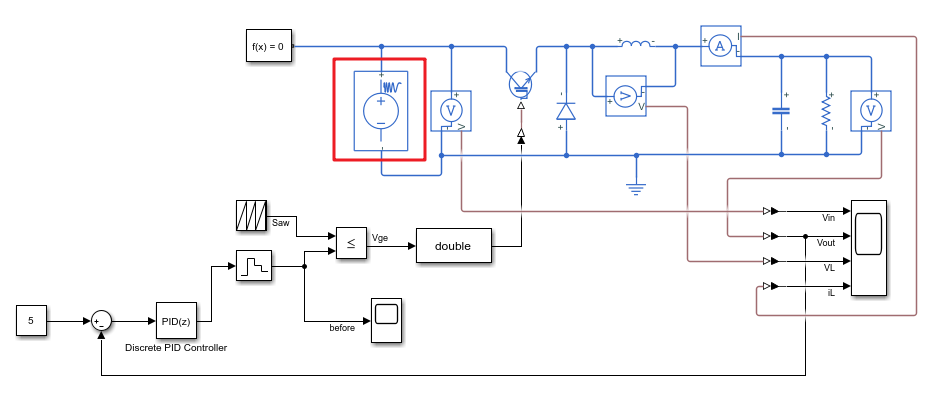
将仿真停止时间设置为3s
仿真结果:
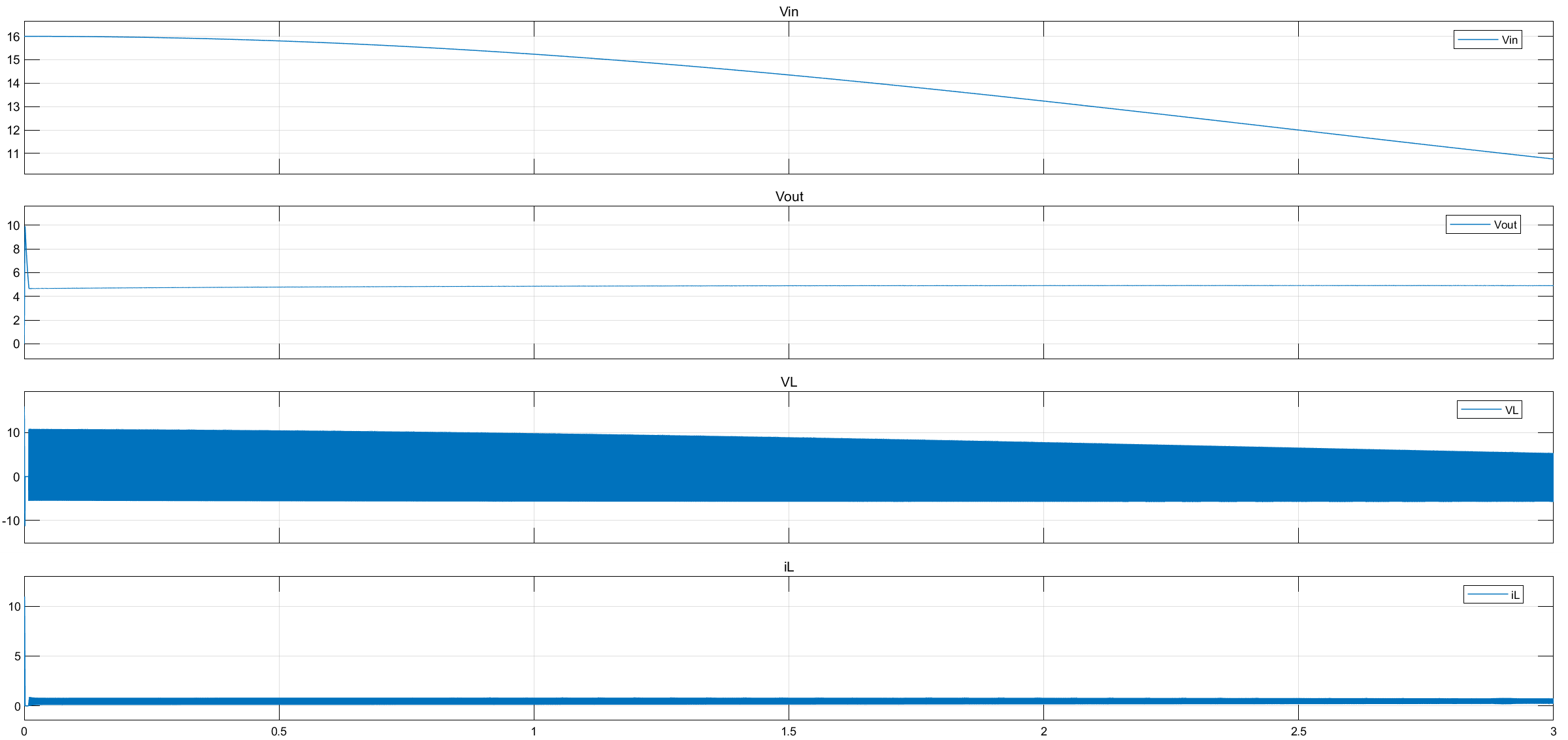
可以看到,尽管输入电压在改变,但输出电压\(V_{out}\)还是会维持在5V左右,因为占空比是PID控制器根据$V_{out}在实时调节.
升压型变换器
升压型变换器,又称为Boost变换器,可以获得高于输入电压的输出电压,与降压转换器一样,通过调节PWM信号以获得输出所需电压.
工作原理
电路原理图如下:
各模块作用同降压型变换器
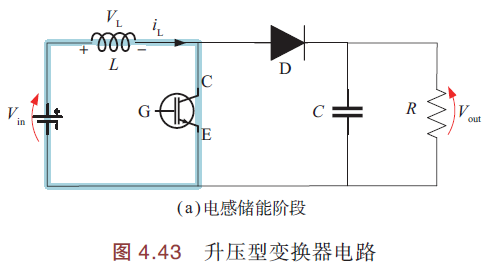
IGBT导通时,\(T_{on}=DT\),电感L储能,二极管截止,负载电阻R被短路.
闭合回路电压方程:
根据电感定义,
此时,电压、电感大小固定,\(i_L\)(随时间变化)斜率为正,电流线性增大
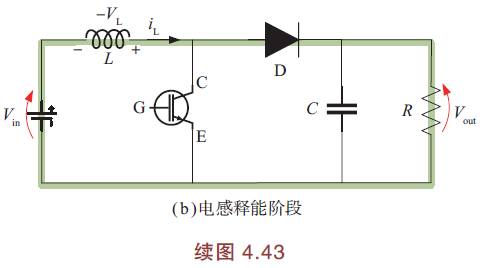
IGBT截止时,\(T_{off}=T-DT\),电感释能,\(V_{in}\)连同电感一起向负载R和电容供电,而二极管导通. 电感电能叠加在电源正端,此时\(V_{out}>V_{in}\). 随着电感放电,电容充电,电流逐渐减小.
闭合回路电压方程:
此时,\(i_L\)(随时间变化)斜率为负,电流线性减小,最终稳态时\(V_{in} < V_{out}\)
虽然斜率为负,但\(i_L>0\),斜率代表的是随时间的变化率.
根据伏秒平衡原理,周期T内,电感的电压积分为0,即输入、输出电压满足:
∵\(0<D<1\)
∴\(V_{in} < V_{out}\)
电感电压\(V_L\),电流\(i_L\)关系如图:

模型设计
文件名:boostConverter.slx
在buckConverter.slx模型基础上修改.
仿真模型:
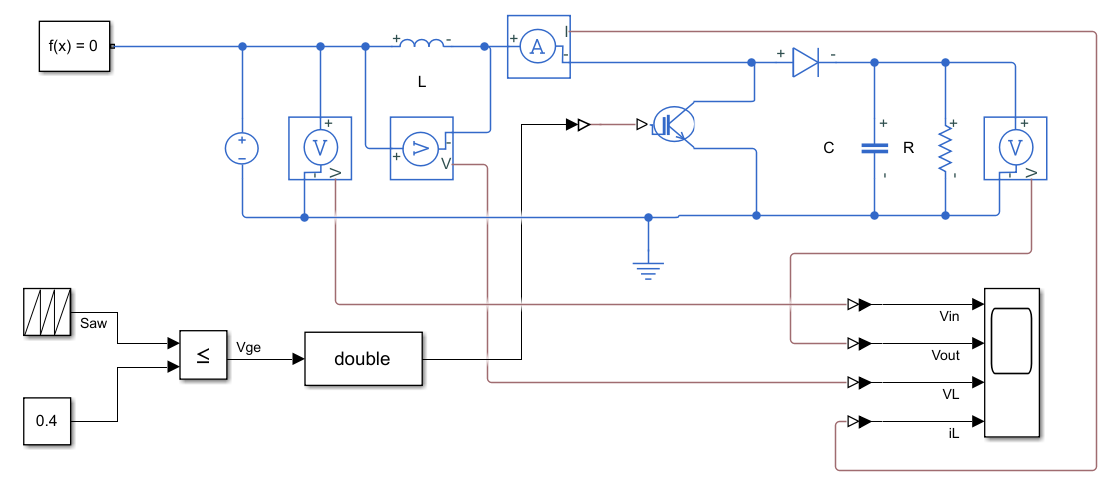
其中,占空比0.4(Constant值),停止时间0.1s
那么,\(V_{out}\)理论值:
仿真结果:
4条曲线分别是\(V_{in},V_{out},V_L,i_L\)
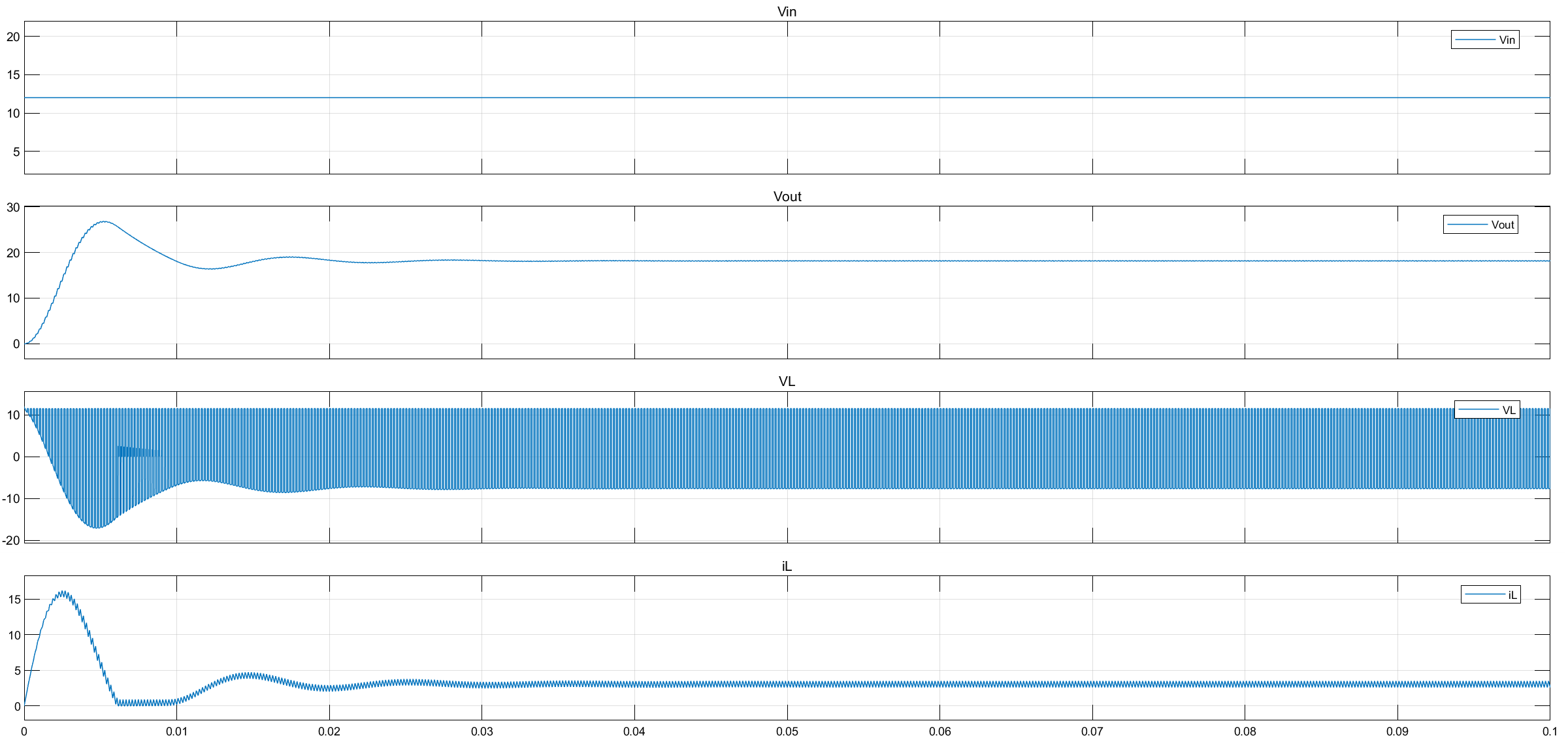
结果放大后,如下图,可以看到\(V_{out}\)值18.1V~18.2V,因为各个模块有内阻没有计算在内. 如果要获得20V电压,需要用自动控制模型,设置目标值,用PID调节器条件.

升压降压变换器
升压降压变换器,称为Buck-Boost 变换器,是一种常用DC-DC变换电路. 其输出电压可低于,也可高于输入电压,但极性相反.
工作原理
电路原理图:
各模块与降压型变换器相同.
IGBT导通时,\(T_{on}=DT\),二极管截止,电感储能. 闭合回路方程:
根据电感方程,有
电流\(i_L\)斜率为正.
IGBT截止时,\(T_{on}=T-DT\),二极管导通,电感释能. 闭合回路电压方程:
根据电感方程,有
电流\(i_L\)斜率为负,\(i_L>0\),二极管电流方向同\(i_L\).
电感电压\(V_L\)与\(i_L\)关系如下图:
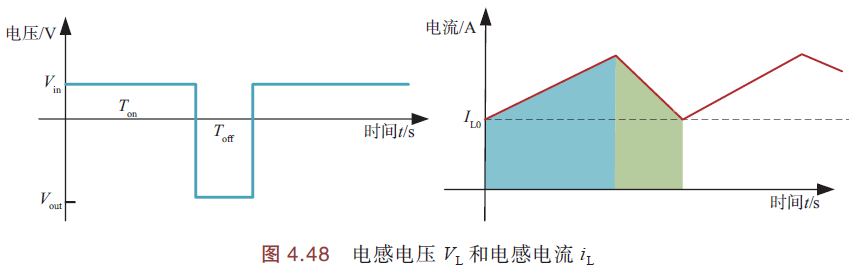
根据伏秒平衡原理,
∵\(V_{in},0<D<\)
∴\(V_{out}<0\)
∵\(T_{on}=DT,T_{off}=T-DT\)
∴
可知,占空比 > 50%时,变换器工作在升压模式;占空比 < 50%时,工作在降压模式.
模型设计、仿真
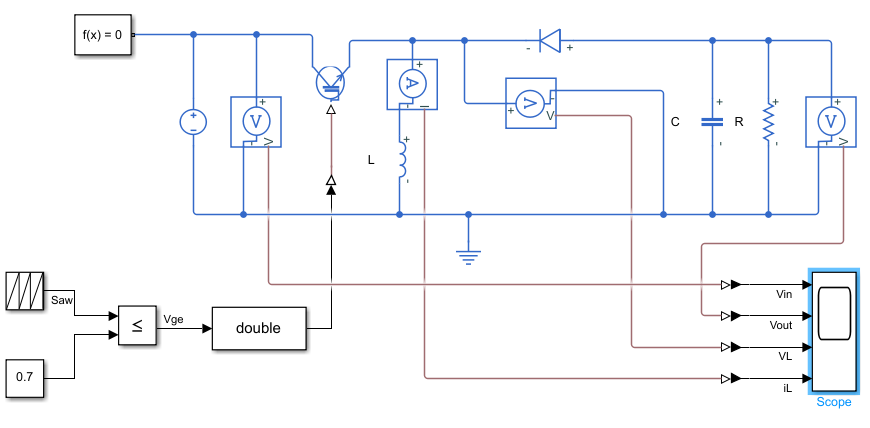
文件名:buckBoostConverter.slx
在BoostConverter.slx基础上修改. 设置占空比D=0.7,停止时间0.1s
仿真模型:
仿真结果:
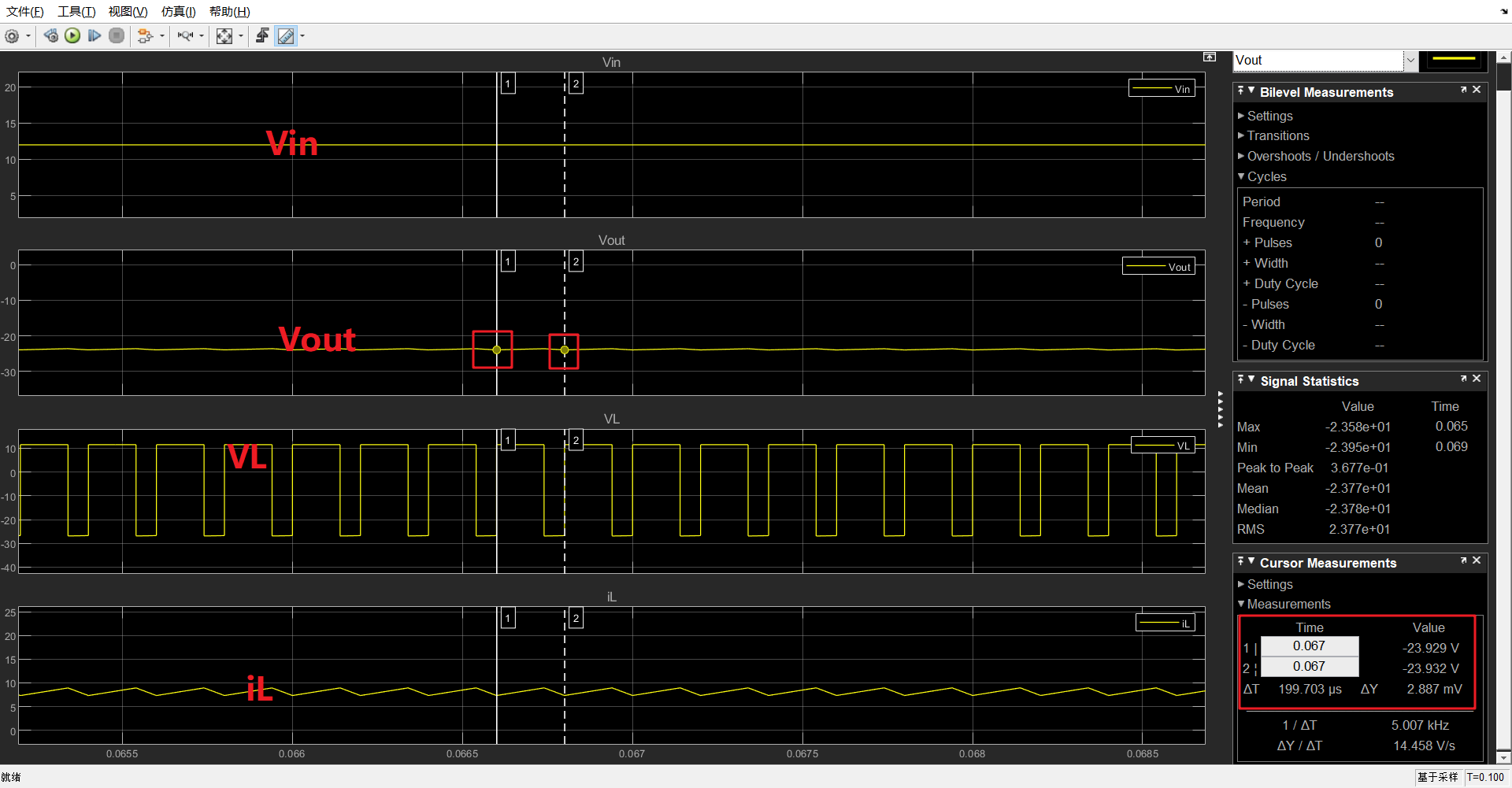
理论输出电压\(V_{out}=-\frac{D}{1-D}V_{in}=-\frac{0.7}{1-0.7}\times 12=-28V\)
实测值:\(V_{out}=-23.93V\) < 理论值,因为每个模块都有内阻,会产生压降.
参考
[1] 武超. MBD入门: 无刷电机控制代码生成. 科学出版社. 2025.1

 浙公网安备 33010602011771号
浙公网安备 33010602011771号