
算法复习
前言
属于是一些模板的快速复习,所以省略了很多证明的部分,应该还算是比较全的,如果出锅了可以私信我修
本文尝试用尽可能简洁的语言帮助选手快速复习学过的知识点,用于查缺补漏而并非学习算法
最短路
floyd
考虑\(f_{i,j,k}\)表示只考虑不超过\(k\)的点和点\(i\)和\(j\),从\(i\)到\(j\)的最短路
实现的时候可以省略掉\(k\)这一维,因为转移的时候\(u\)到\(k\)的最短路和\(k\)到\(v\)的最短路是否被更新过是不影响答案的
bitset+Floyd传递闭包
考虑\(reach_{i,j}\)表示从\(i\)点能否到达\(j\)点,那么常规floyd的写法为
for(int k=1;k<=n;k++)
for(int i=1;i<=n;i++)
for(int j=1;j<=n;j++)
reach[i][j] |= reach[i][k] & reach[k][j];
考虑如果reach[i][k]=1,则问题转化为
reach[i][j]|=reach[k][j]
考虑使用bitset进行优化
const int N = 2000;
bitset<N> reach[N];
for(int k=0;k<n;k++){
for(int i=0;i<n;i++){
if(reach[i][k]){
reach[i] |= reach[k];
}
}
}
Bellman-Ford
每次枚举所有的边进行增广,对于边进行\(n-1\)轮松弛操作(\(dis_i=min(dis_j+w,dis_i)\))
SPFA
考虑对于Bellman-Ford进行优化,如果当前的点被松弛操作了,才能进队,即如果\(dis_i\)被\(ckmin\)了就将\(i\)进队
实现上可以简单理解为,如果节点\(i\)没有在队列中,就能进队
Dijkstra
考虑每轮操作找到没有被确定最小路径的点中\(dis\)最小的点,确定它的最短路径,然后从它开始进行松弛操作
实线上可以简单理解为,如果节点\(i\)出过队(被确定了最短路径),就不能再次进入队列了
使用优先队列维护\(dis\)最小的点,卡常数zkw线段树代替优先队列
图不能有负权,不然上面的算法是错误的
Johnson全源最短路
Johnson全源最短路是基于负权图上,将负权图通过某种方法转化为非负权,随后从每个点开始跑Dijkstra的算法,如果是正权的话,没必要Johnson
考虑新增加一个超级源点,从超级源点开始跑Bellman-Ford得到每个节点到超级源点的距离,记录到节点\(i\)的最短路是\(d_i\),随后在\(u->v\)的边权加上\(d_u-d_v\),这样图就没有负数边权了
然后就Dijkstra跑出最短路,最后真实的距离\(d(u,v)=d(u,v)-d(u)+d(v)\),其实就是还原回来了
同余最短路
考虑有的题面会要求路径的权重对于\(k\)取模,这时不妨考虑\((u,r)\)表示到达点\(u\)的时候路径长度对于\(k\)取模后为\(r\),然后对于\((u,r)\)看作一个点作\(Dijkstra\)即可
注意\(d(u,r)\)表示的是到达这种状态的最小代价,或者直接就是可达性
差分约束
考虑原理是什么,如果有一条边权值为\(w\),从\(u\)到\(v\),则有\(dis_v\leq dis_u+w\),因为如果\(dis_v\)比\(dis_u+w\)大的话显然可以走\(w\)这条边
因此转化成不等式就是\(x_i+A\geq x_j\)
从任意点开始跑最短路,若在某个连通块中存在负环,给定的差分约束系统无解,否则\(\{d[i]\}\)(\(d_i\)表示到达点\(i\)的最短距离)为该系统的一组解 若\(\{x[i]\}\)是一组解,\(\{x[i]+Δ\}\)也是该系统的一组解
因为图可能不连通,所以可以建立一个超级源点
如果要求\(x_a=x_b\),则\(a\)和\(b\)连接边权为\(0\)的双向边即可
如果强制要求\(x_n=num\),可以让\(d_n=num\),然后从n跑最短路
最短路相当于最大化\(d_n-d_1\)
最长路相当于最小化\(d_n-d_1\),注意最长路的限制实际上是\(d_v\geq d_u+w\)
杂项
不是很好细分的知识点,可能并非传统意义上的杂项
单调队列
通常是求滑动窗口内部极值
维护一个队列,如果队列里有一个点比前面的点大,那么前面的那个点就可以出队了,如果前面的点出了滑动窗口也出队
单调栈
维护栈内的元素单调性,如果当前的元素比前面的元素值大/小(不满足单调性了),则前面的元素就要出队!
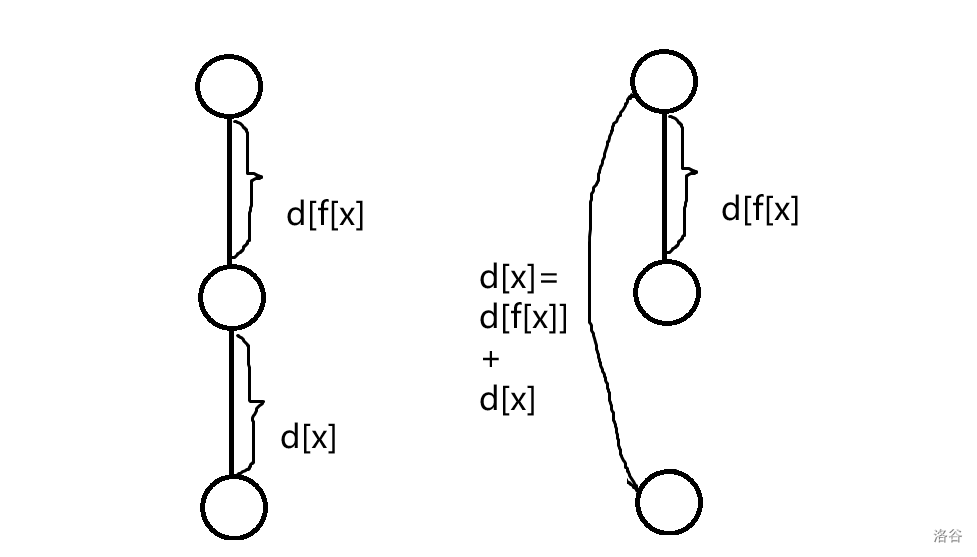
并查集
这里介绍扩展域并查集
考虑\(d_u\)表示从\(u\)到\(fa_u\)的权值,则路径压缩的时候应该这样写
int xx=F(f[x]);
d[x]+=d[f[x]];
return f[x]=xx;
结合这张图应该很好理解
平衡树
Treap
同时满足堆和二叉搜索树的性质,即左子树的权值小于父亲小于右子树的权值(key),父亲的随机值(rk)大于左右子树的随机值(rk)(其实也可以是小于,都一样),这样就很容易维护各种操作了
这里因为篇幅原因之讲解split操作和merge操作
split操作只看key值,merge操作只看rk值,可以证明按照下面的写法,树总是满足二叉搜索树性质和堆性质的
先考虑基本的平衡树,即维护值域的平衡树
split函数要求将树\(p\)按照\(key\leq x\)分为\(pl\)和\(pr\)
那么如果\(p\)根节点的权值\(\leq x\),\(p\)的根节点和左子树都划分给\(pl\),然后到\(p\)的右子树再次划分给\(pl\)的右子树和\(pr\)
我写的是指针版,是这样的
pl=p;
split(p->rs,pl->rs,pr,x);
pl->upd();
如果\(p\)的根节点的权值\(>x\),\(p\)的根节点和右子树都划分给\(pr\),然后到\(p\)的左子树再次划分给\(pr\)的左子树和\(pl\)
pr=p;
split(p->ls,pl,pr->ls,x);
pr->upd();
merge操作需要将\(pl\)和\(pr\)合并到\(p\)
merge操作,如果\(pl\)的\(rk\)比\(pr\)的小,那么\(pl\)应该在\(pr\)的上面
因此将\(pl\)分给\(p\),然后合并\(pl\)的右子树和\(pr\),合并后的子树放到\(p\)的右子树
如果\(pl\)的\(rk\)比\(pr\)的小,那么\(pr\)应该在\(pl\)的上方,\(pr\)分给\(p\),\(pl\)和\(pr\)的左子树合并到\(p\)的左子树
发现上面的合并方法有点怪,这是为了保证合并之后的树仍然满足二叉搜索树的性质
if(pl->rk<=pr->rk){
p=pl;
merge(p->rs,pl->rs,pr);
}
else{
p=pr;
merge(p->ls,pl,pr->ls);
}
p->upd();
然后是维护序列的平衡树
这个时候split函数的含义变为左边分原序列顺序下的前\(x\)个,维护的树的中序遍历就是原序列
这个时候支持区间反转操作,即每个有儿子的子树都执行\(swap(ls,rs)\)的操作
Splay
这里应该还要有Splay,但是我不会
动态规划
区间dp
维护的信息是\(f_{l,r}\)表示区间\([l,r]\)的某种信息,转移的时候考虑先枚举区间长度,再枚举该长度下的所有区间
数位dp
考虑\(dp_{cur,f,g,x}\)表示前\(cur\)位(通常是从高位到低位的前\(cur\)位),\(f\)表示是否卡满了上界,\(g\)表示是否当前还全部都是前导零,\(x\)是一些要维护的信息,维护在这种情况下有多少填数的方案
通常情况下写为记忆化搜索的形式更为简洁和易懂
单调队列/栈优化dp
单调队列主要用于维护两端指针单调不减的区间最值,而单调栈则主要用于维护前/后第一个大于/小于当前值的数
当区间的转移满足以上条件到时候就能够使用以上的方法对于\(dp\)进行优化
斜率优化dp
应该也要讲,但我暂时不会
决策单调性优化dp
考虑转移的形式为
考虑如果对于\(a\leq b\leq c\leq d\)的均有
则称\(w\)满足四边形不等式,\(f_i\)的转移满足决策单调性
若转移\(f_i\)在\(j\)处取得最小值,称\(f_i\)的决策点为\(j\),记为\(opt(i)=j\),决策单调性即\(i_1<i_2\),则\(opt(i_1)\leq opt(i_2)\)
在知道了决策单调性后,有很多种方法维护决策单调性dp
- 分治:
考虑对于所有的\(1\leq i\leq n\)求解出\(opt(i)\),首先计算出\(opt(n/2)\),方法是枚举所有的点,计算出\(opt(n/2)\)的时候分治计算,\(solve(l,r,optl,optr)\)表示\([l,r]\)的点,其最优决策点在\([optl,optr]\)的时候,求出\([l,r]\)的最优决策点
考虑\(mid=(l+r)/2\),则分类为calc(l,mid-1,optl,opt[mid]-1和calc(mid+1,r,opt[mid]+1,optr)继续分治计算
这个时候\(w\)函数可以只支持移动访问,但是\(f_i\)不能依赖之前的\(f_j\)
- 二分队列:
注意到有性质,\(p(i)=j\)的\(i\)在\(j\)确定的时候构成一个区间
因此算法遍历所有的决策点\(i\),使用一个队列维护三元组\((j,l_j,r_j)\),表示点\(j\)在目前是\([l_j,r_j]\)的点的最优决策点
最初的时候只有一个三元组\([1,1,n]\),表示只考虑\(\leq 1\)的决策点的时候,\(1\)就是所有点的最优决策点
每次加入点\(i\)的时候,当前队尾的决策为\(j\),如果\(w(i,l_j)<w(j,l_j)\)的话,证明\([l_j,r_j]\)的最优决策都变为了\(i\),将这个区间直接出队
重复以上过程直到有\(w(i,l_j)\geq w(j,l_j)\),这时候\([l_j,r_j]\)被分为\([l_j,x]\)和\([x+1,r_j]\),其中左半部分以\(j\)为最优决策点,右半部分以\(i\)为最优决策点,可以二分,然后将\([l_j,r_j]\)拆成两部分,右半部分最后一次加入
最后,将\([i,y,n]\)加入队列,表示当前\(i\)为区间\([y,n]\)的最优决策点
适用于\(f_i\)的计算需要依赖\(j<i\)的\(f_j\)的情况,但是\(w\)函数的计算必须支持随机访问
- 简化LARSCH算法
适用于\(f_i\)依赖前面的\(f_j\)并且\(w\)不能随机访问的情况
简单来说,在求解区间\([l+1,r]\)的时候,已经知道了\(i\in [1,l]\)的\(opt(i)\),\(f_i\),仅考虑\([1,l]\)的决策的时候\(r\)的\(opt\)和\(f\),记录为\(opt_l(r)\)和\(f_l(r)\)
考虑流程
-
遍历\([opt(l),opt_l(r)]\),更新\(opt(mid)\)和\(f(mid)\)
-
求解\((l,mid]\)的问题
-
遍历\(i\in (l,mid]\),更新\(f(r)\)和\(opt(r)\)
-
求解\((mid,r]\)的问题
模意义下数论
\(\varphi(x)\)表示\(\leq x\)的数与\(x\)互质的数的个数,即欧拉函数
欧拉定理
费马小定理
通常用于快速求出逆元
扩展欧拉定理
威尔逊定理
Kummer定理
考虑对于任意\(n\)和\(k\),表示为以\(p\)为基的形式展开
有
卢卡斯定理
字符串
Trie
树根是空节点,Trie为一个树形结构,边权为一个字符,每条从根到某个节点的路径的边权的字符连接起来表示一个字符串
插入就是沿着已经有的边走,如果没有已经有的边就新建立一个,有时插入完成后需要打上终止标记
查询也是沿着已经有的边走
KMP
字符串采用1-index
问\(s\)在\(t\)中出现多少次
一个字符串的border定义为前缀和后缀相同的部分
\(kmp_i\)表示\([1,i]\)这个子串的最长border的长度
考虑已经知道了当前枚举到文本串\(s\)第\(i\)个字符,匹配到模式串\(t\)第\(j\)个字符,即\(s_{i-j+1\dots i}=t_{1\dots j}\)如果\(s_i\neq s_{j+1}\),则将\(j\)跳转到\(kmp_j\),显然是优秀的,且能够保证\([1,kmp_j]\)的部分仍然和\(s_i\)的部分匹配上
创建\(kmp\)数组就是自己同时作为文本串和模式串匹配的过程,因为\(kmp_i\)就是后缀等于前缀的最大长度,完美符合匹配过程的文本串和模式串尽可能多的匹配上
Manacher
字符串采用1-index
求出以每个节点为中心的最长回文串长度,进而推导出整个序列的全部回文串信息
考虑因为回文串的长度有奇数和偶数之分,所以一开始直接在每个字符的两侧插入#,比如aba变成#a#b#a#
考虑记录\(P_i\)表示以\(i\)为中心的回文串的最长长度
考虑如果已经知道了前\(i\)个位置的\(P_i\),则考虑\(c\)为\([1,i]\)的\(P_i\)取到最大值的位置,\(r\)为\(c\)延申到的最右侧的端点
若\(i\geq r\),则证明只能从头开始暴力扩展
否则,如果\(i<r\),则证明位置\(j=2r-i\),即\(i\)关于\(r\)的对称点,周围的结构是和\(i\)周围的结构相同的
因此直接让\(p_i=p_j\),然后尝试能不能扩展(其实只有\(p_i=r\)的时候扩展才是有必要的)
EXKMP
字符串采用1-index
虽然叫做KMP,但是思路几乎和Manacher相同
定义\(z_i\)为\(s_{i\dots n}\)和\(s\)的lcp
其实就是从\(i\)开始的\(s\)的后缀和\(s\)的lcp,但是\(z_0=0\)
考虑怎么尝试使用已经求出的\(z_{0\dots i-1}\)来推导出\(z_i\)
考虑称\([i.i+z_i-1]\)为\(i\)的匹配段,即Z-box
每次维护右端点最靠右的匹配段,记作\([l,r]\)
若\(i\leq r\),则\(s[i,r]=s[i-l,r-l]\),\(z_i\geq min(z_{i-l},r-i+1)\)
发现其实\([i,r]\)的部分是和\([i-l,i-l+r]\)的部分同构
那么如果\(z[i-l]<r-i+1\),则\(z[i]=z[i-l]\)
\(z[i-l]\geq r-i+1\),则考虑直接让\(z[i]=r-i+1\),然后暴力扩展
如果\(i>r\)显然只能用朴素算法了

 浙公网安备 33010602011771号
浙公网安备 33010602011771号