https://support.unitree.com/home/zh/H1_developer
| |
通用人形机器人
开源适配
四足机器人
机械臂
组件
感知

H1 SDK 开发指南
- 关于 H1
 更新时间:2025-02-05 14:53:49
宇树人形机器人开发使用温馨提示
由于普通大众,都比较喜欢和真人运动更加接近和自然的动作,所以以下几点人形机器人使用事项,还请大家重视,尤其是在拍摄机器人视频的时候:
- 开发的腿部运动程序,尽可能使膝关节到直立,或者接近直立状态;
- 尽可能降低步频,并且尽可能避免原地踏步;
- 双脚略微靠拢,行走的时候尽可能避免撇开双脚;
希望以上内容能对您有所帮助。
成果视频署名建议
尊敬的开发者您好,我们建议您在发布自己的研究成果视频时,可以在视频中的显著位置全视频添加您实验室的名称或标志(Logo)。以免后续视频传播的时候,普通群众不清楚视频实际的出处。在此感谢您对宇树科技的支持。
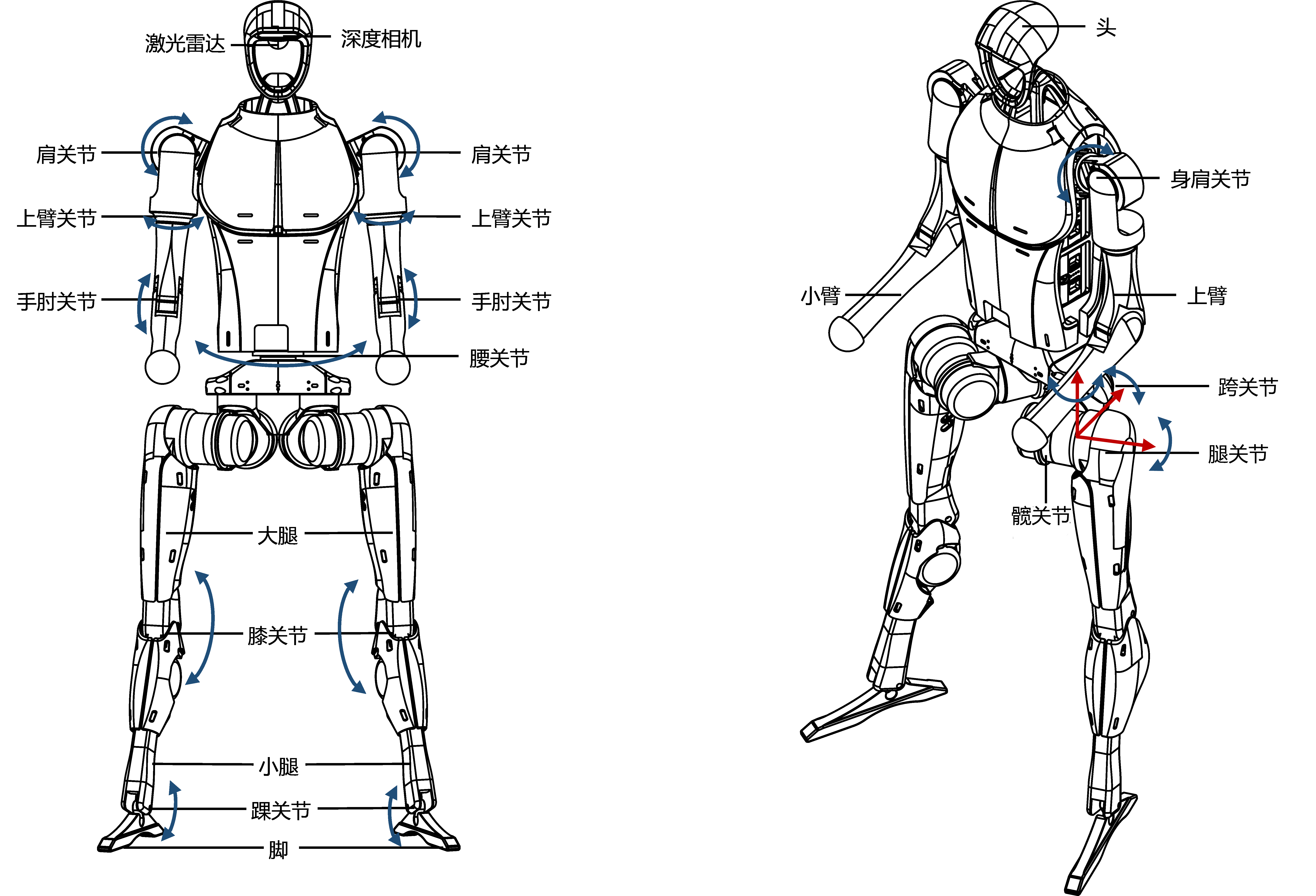
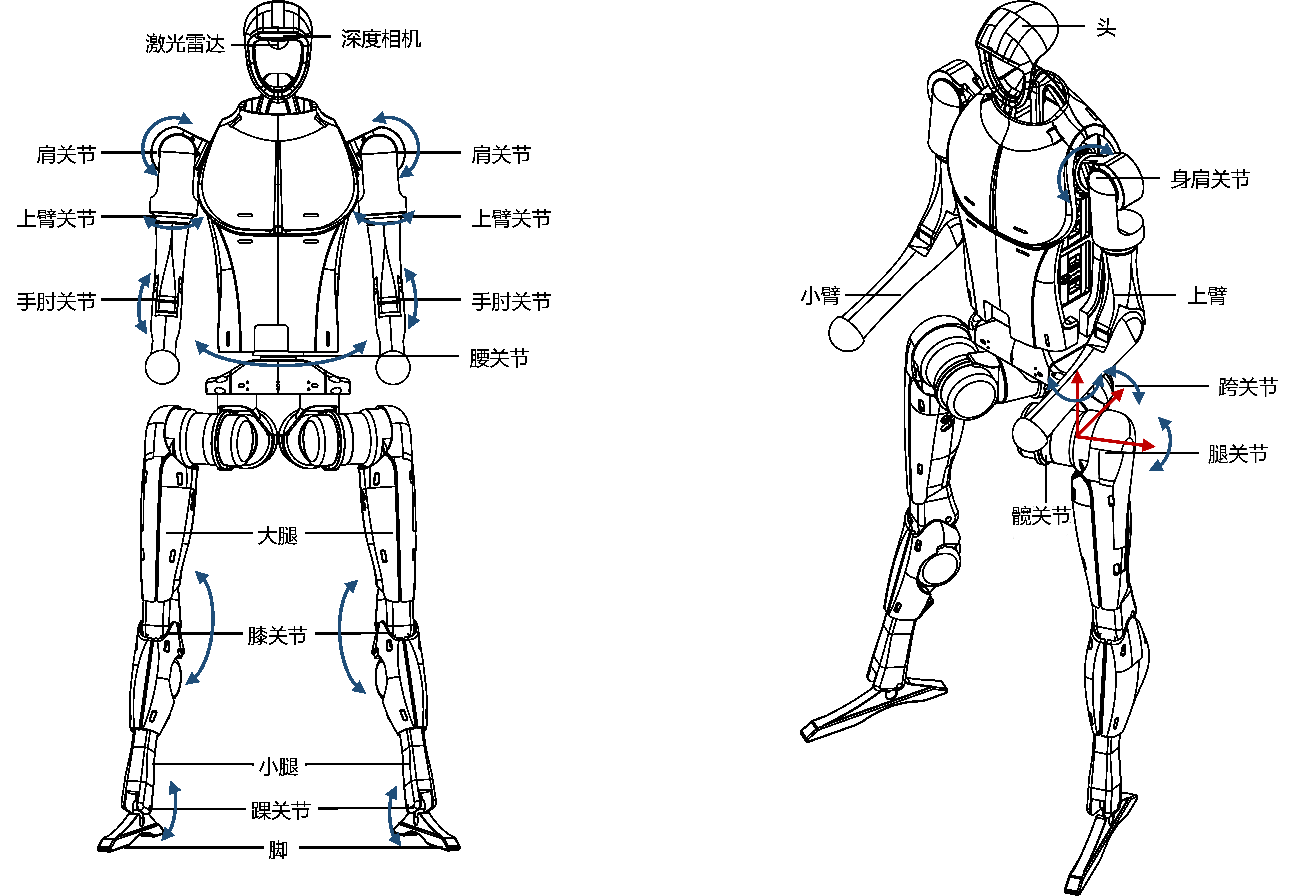
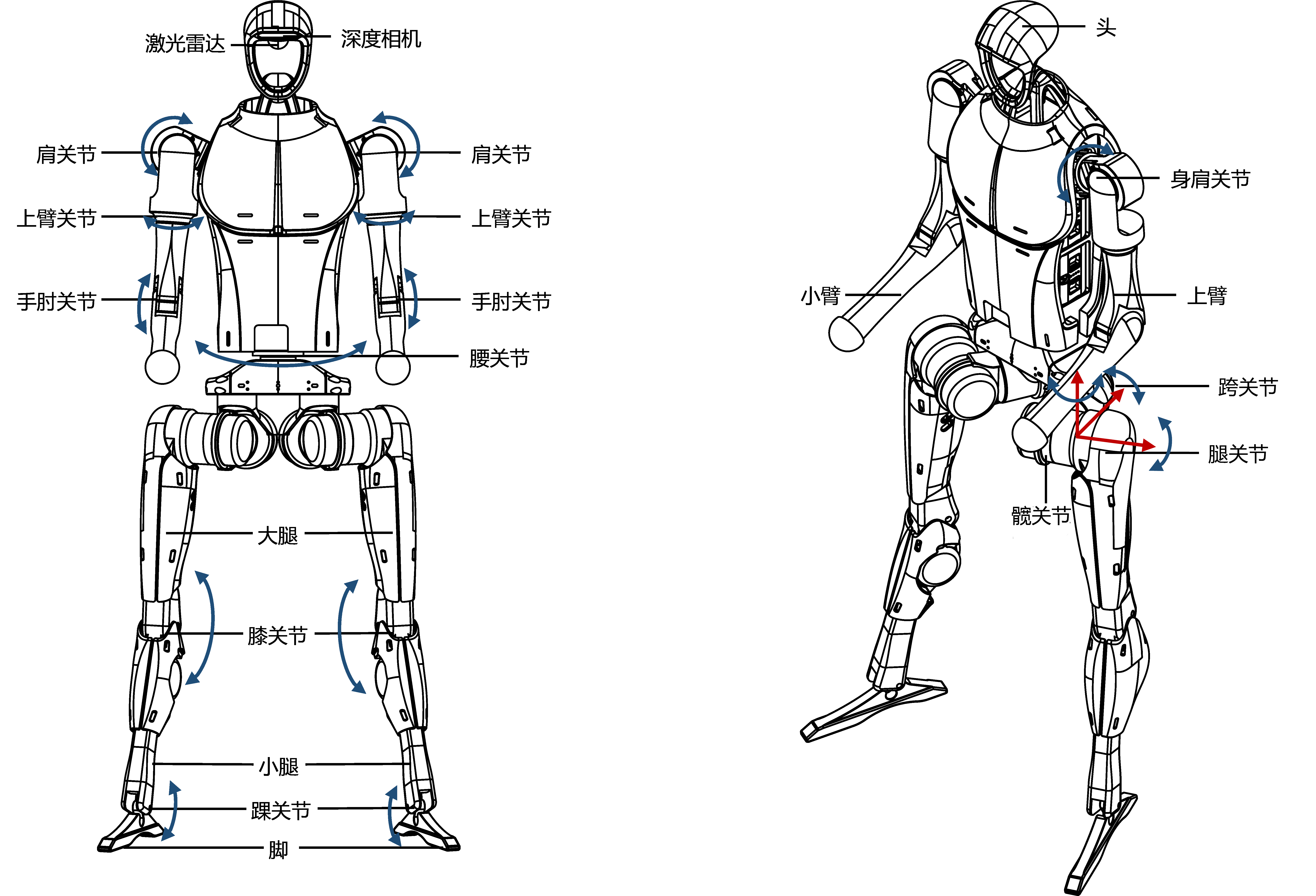
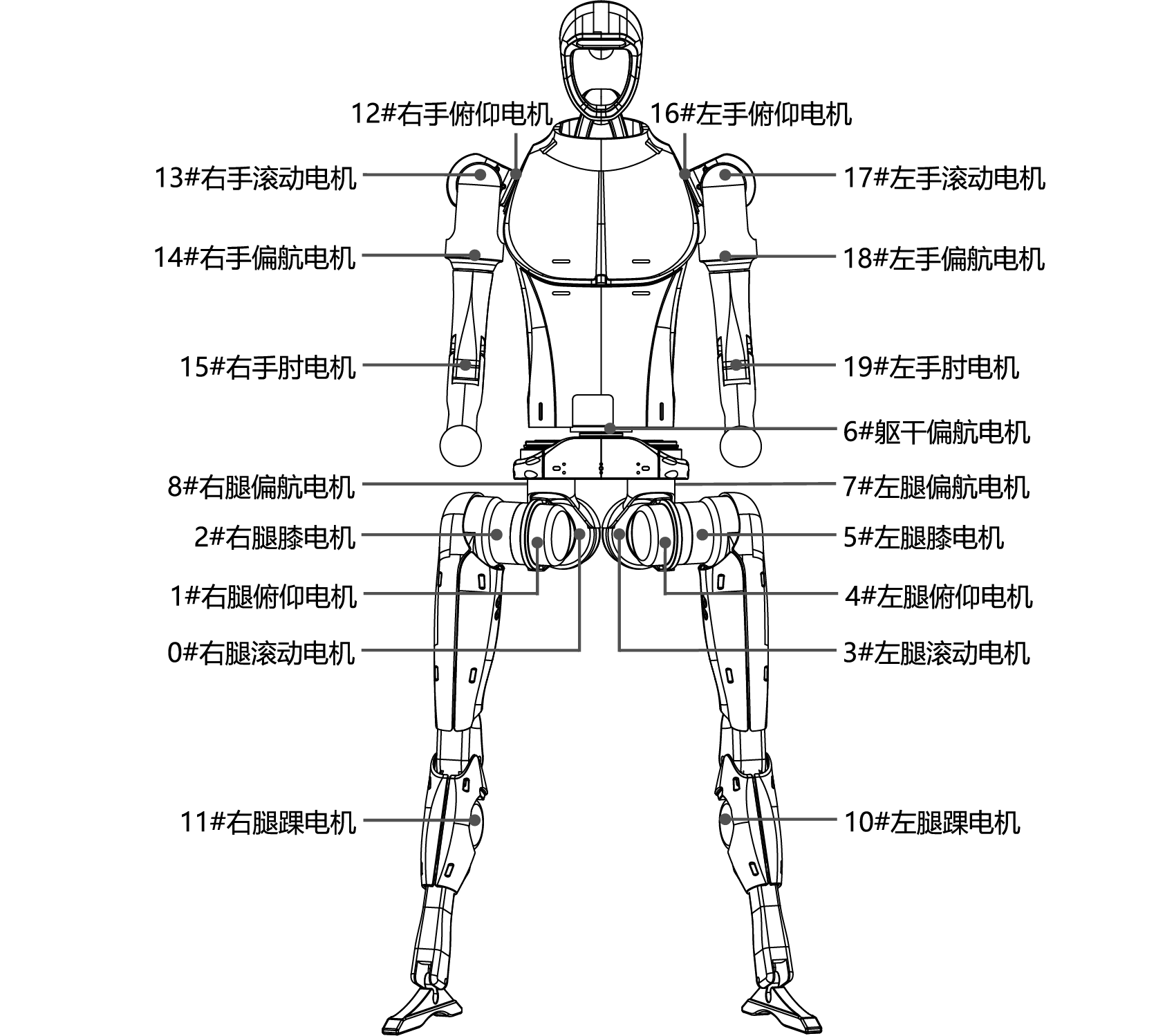
部件名称
H1整机分为上半身和下半身,具备多个自由度。单手臂拥有 4 个自由度,包括身肩关节、肩关节、上臂关节和手肘关节。单腿拥有 5 个自由度,包括胯关节、腿关节、髋关节、膝关节和踝关节。腰部具备 1 个自由度,即腰关节。整机共有 19 个自由度,由 19 个关节电机组成,使得机器人能够实现精确的运动和姿态控制。
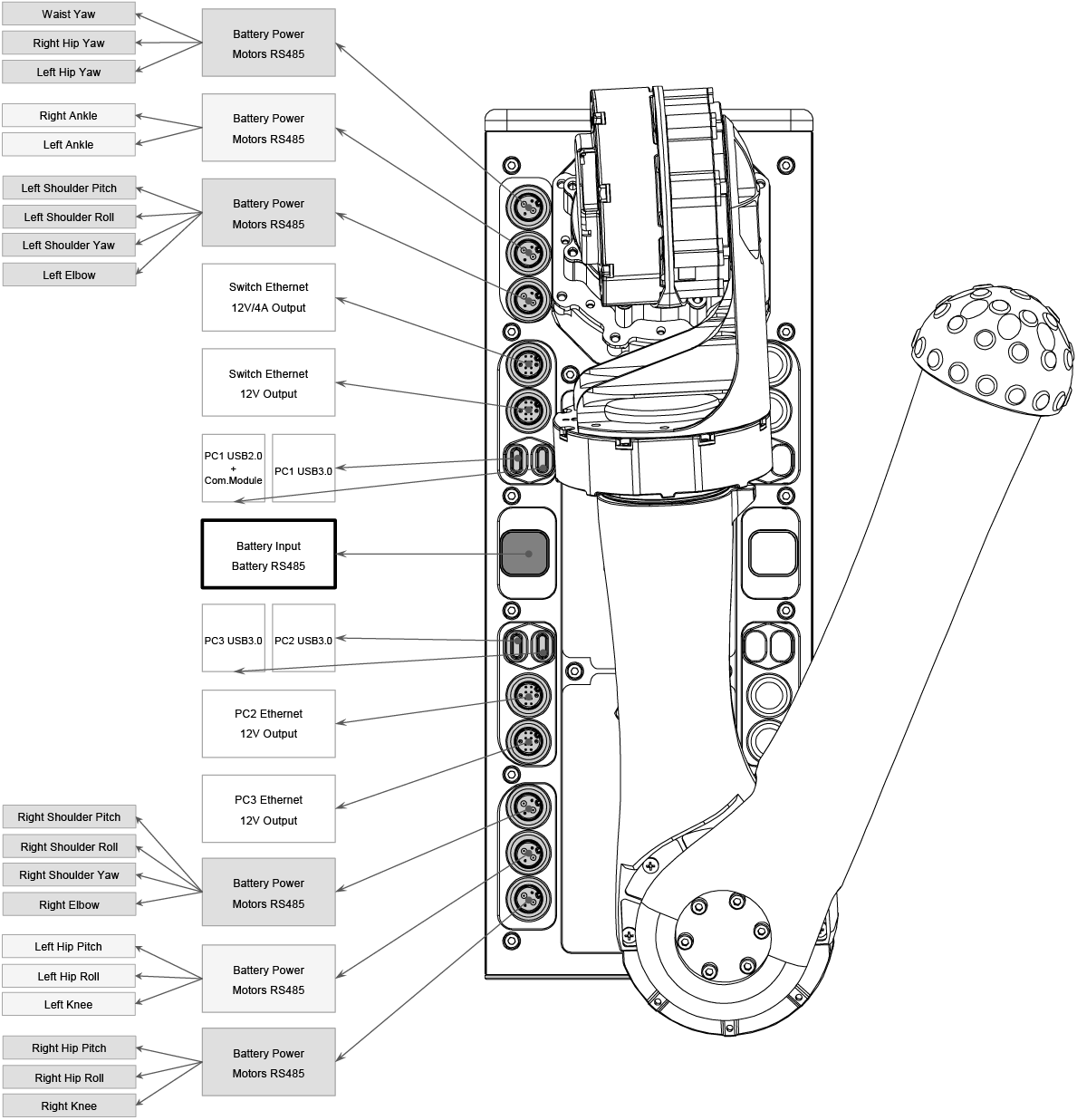
电气接口
H1 的右侧配备了电气接口,这些接口用于连接各个机身关节电机、传感器外设、网口等。这样的设计使您能够方便地进行调试、排查问题以及进行二次开发。
机载计算机
H1 机载标配 1 块【运控计算单元】,1 块【开发计算单元】,并且可选配一块【开发计算单元】。
| | 运控计算单元(PC 1) | 开发计算单元(PC 2、PC 3) |
|---|
| 型号 |
i5-1235U |
i7-1255U / i7-1265U |
| 内核数 |
10 |
10 |
| 线程数 |
12 |
12 |
| 最大睿频频率 |
4.40 GHz |
4.70 GHz & 4.80 GHz |
| 内存 |
8G |
16G & 32G |
| 内存类型 |
LPDDR5 5200 MT/s(dual-channel) |
LPDDR5 5200 MT/s(dual-channel) |
| 缓存 |
12 MB Intel® Smart Cache |
12 MB Intel® Smart Cache |
| 存储 |
500G 以上 |
500G 以上 |
| 英特尔® 图像处理单元 |
无 |
6.0 |
| GPU |
Intel® Iris® Xe Graphics eligible |
Intel® Iris® Xe Graphics eligible |
| 显卡最大动态频率 |
1.20 GHz |
1.20 GHz |
| 高斯和神经加速器 |
3.0 |
3.0 |
| 英特尔®深度学习提升 |
是 |
是 |
| 英特尔®Adaptix™ 技术 |
是 |
是 |
| 英特尔®超线程技术 |
是 |
是 |
| 指令集 |
64bit |
64bit |
| OpenGL |
4.6 |
4.6 |
| OpenCL |
3.0 |
3.0 |
| DirectX |
12.1 |
12.1 |
| IP 地址 |
不对外开放 |
192.168.123.162\163 |
- 【运控计算单元】为 Unitree 运动控制程序专用,不对外开放。开发者仅可使用【开发计算单元】进行二次开发。请联系技术支持获取初始用户密码。
- 表中PC3【开发计算单元】为选配项,地址为192.168.123.163。
- CPU 模块发货时可能变更为不低于上述的性能的更先进版本。
激光雷达
H1 头部搭载了 MID-360 激光雷达(IP:192.168.123.120),为机器人提供了卓越的环境感知能力。激光雷达采用全方位、全角度的扫描技术,能够实时获取精准的环境数据。它能够快速识别和测量周围的物体,提供高分辨率的点云数据。
深度相机
H1 头部搭载 D435 深度相机,为机器人提供了卓越的视觉感知能力,能够更准确地感知和理解周围环境,实现精确的空间感知和障碍物检测,使机器人能够更智能、灵活地与环境进行交互和应对各种场景。
M107 关节电机
H1 部分关节采用了 Unitree 自研 M107 电机,具备出色的性能和特点。该电机的最大扭矩为 360N.m,最大拉力(在 3.5cm 力臂等效条件下)为 10000N,采用了中空轴线的设计,使得电机在结构上更加轻量化、紧凑化。M107 电机还配备了双编码器,提供更准确的位置和速度反馈,以满足高精度控制的需求。
关节序号与关节限位
| 关节序号 | 关节名称 | 限位 |
|---|
| 8 |
右腿偏航电机 |
-0.43~+0.43 rad |
| 0 |
右腿滚动电机 |
-0.43~+0.43 rad |
| 1 |
右腿俯仰电机 |
-3.14~+2.53 rad |
| 2 |
右腿膝电机 |
-0.26~+2.05 rad |
| 11 |
右腿踝电机 |
-0.87~+0.52 rad |
| 7 |
左腿偏航电机 |
-0.43~+0.43 rad |
| 3 |
左腿滚动电机 |
-0.43~+0.43 rad |
| 4 |
左腿俯仰电机 |
-3.14~+2.53 rad |
| 5 |
左腿膝电机 |
-0.26~+2.05 rad |
| 10 |
左腿踝电机 |
-0.87~+0.52 rad |
| 6 |
躯干偏航电机 |
-2.35~+2.35 rad |
| 12 |
右手俯仰电机 |
-2.87~+2.87 rad |
| 13 |
右手滚动电机 |
-3.11~+0.34 rad |
| 14 |
右手偏航电机 |
-4.45~+1.3 rad |
| 15 |
右手肘电机 |
-1.25~+2.61 rad |
| 16 |
左手俯仰电机 |
-2.87~+2.87 rad |
| 17 |
左手滚动电机 |
-0.34~+3.11 rad |
| 18 |
左手偏航电机 |
-1.3~+4.45 rad |
| 19 |
左手肘电机 |
-1.25~+2.61 rad |
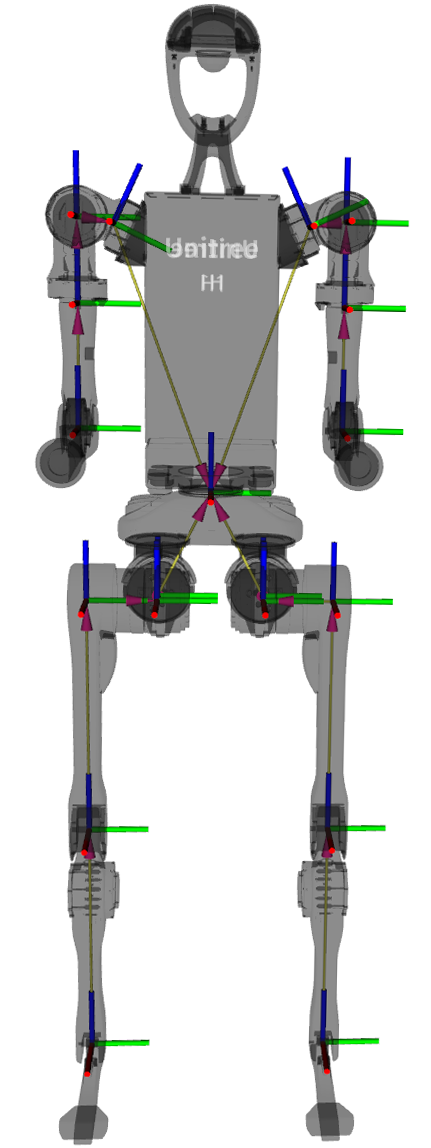
坐标系,关节旋转轴与关节零点
当各个关节均为零度时,各坐标系如下图。红色为 x 轴,绿色为 y 轴,蓝色为 z 轴。
机器人规格
| Unitree H1 规格参数 | |
|---|
| 关键尺寸 |
(1520+285)mm × 570mm × 220mm |
| 大腿和小腿长度 |
400mm × 2 |
| 手臂总长度 |
338mm × 2 |
| 单腿自由度 |
髋关节 × 3 + 膝关节 × 1 + 踝关节 × 1 = 5 |
| 单手臂自由度 |
4(可拓展) |
| 整机重量 |
约 47kg |
| 关节输出轴承 |
工业级交叉滚子轴承(高精度,高承载力) |
| 核心关节电机 |
低惯量高速内转子永磁同步电机(更好的响应速度和散热) |
| 关节单元极限扭矩 |
膝关节约 360N.m,髋关节约 220N.m,踝关节约 59N.m,手臂节约 75N.m |
| 行走速度 |
大于 1.5m/s(潜在运动能力 >5m/s) |
| 电池 |
容量 15Ah(0.864KWh),最大电压 67.2V |
| 控制和感知算力 |
1 x Intel Core i5-1235U + 1 × Intel Core i7-1255U/1265U(可再增配:Intel Core i7或Nvidia Jetson Orin NX) |
| 感知传感器配置 |
3D激光雷达 + 深度相机 |
| 灵巧手 |
选配(正在开发,敬请期待) |
note
产品持续迭代优化,参数可能略有不同,请以实际收货为准
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
通用人形机器人
开源适配
四足机器人
机械臂
组件
感知

Go2 SDK 开发指南
- 关于 Go2
更新时间:2025-02-19 16:21:52
Go2 产品列表
| 型号 | AIR | PRO | MAX | EDU |
|---|
| 渲染图 |
 |
 |
 |
 |
| 机械参数 |
站立尺寸 |
70cmx31cmx40cm |
70cmx31cmx40cm |
70cmx31cmx40cm |
70cmx31cmx40cm |
| 关机趴下尺寸 |
76cmx31cmx20cm |
76cmx31cmx20cm |
76cmx31cmx20cm |
76cmx31cmx20cm |
| 带电池重量 |
约15kg |
约15kg |
约15kg |
约15kg |
| 材质信息 |
铝合金+
高强度工程塑料 |
铝合金+
高强度工程塑料 |
铝合金+
高强度工程塑料 |
铝合金+
高强度工程塑料 |
| 电气参数 |
供电电压 |
28V~33.6V |
28V~33.6V |
28V~33.6V |
28V~33.6V |
| 工作最大功率 |
约3000W |
约3000W |
约3000W |
约3000W |
| 性能参数 |
载荷 |
≈7kg(极限~10kg) |
≈8kg(极限~10kg) |
≈8kg(极限~10kg) |
≈8kg(极限~12kg) |
| 运动速度 |
0~2.5m/s |
0~3.5m/s |
0~3.5m/s |
0~3.7m/s
(极限~5m/s) |
| 最大攀爬落差高度 |
约15cm |
约16cm |
约16cm |
约16cm |
| 最大攀爬斜坡角度 |
30° |
40° |
40° |
40° |
| 基础算力 |
/ |
8核高性能CPU[4] |
8核高性能CPU |
8核高性能CPU |
| 关节参数 |
最大关节扭矩[1] |
/ |
约45N.m |
约45N.m |
约45N.m |
| 铝合金精密关节电机 |
12个 |
12个 |
12个 |
12个 |
| 超大关节运动空间 |
机身:-48~48°
大腿:-200~90°
小腿:-156~-48° |
机身:-48~48°
大腿:-200~90°
小腿:-156~-48° |
机身:-48~48°
大腿:-200~90°
小腿:-156~-48° |
机身:-48~48°
大腿:-200~90°
小腿:-156~-48° |
| 膝关节内走线 |
有 |
有 |
有 |
有 |
| 关节热管辅助散热 |
有 |
有 |
有 |
有 |
| 传感器配置 |
超广角3D激光雷达 |
有 |
有 |
有 |
有 |
无线矢量定位
伴随模组 |
无 |
有 |
有 |
有 |
| 高清广角相机 |
有 |
有 |
有 |
有 |
| 足端力传感器 |
无 |
无 |
无 |
有 |
| 功能列表 |
基本运动、舞蹈等 |
有 |
有 |
有 |
有 |
| 自动伸缩提手带 |
无 |
有 |
无 |
无 |
| 智能OTA升级 |
有 |
有 |
有 |
有 |
| RTT 2.0 图传 |
有 |
有 |
有 |
有 |
| 图形化编程 |
有 |
有 |
有 |
有 |
| 前置照明灯 (3W) |
有 |
有 |
有 |
有 |
| Wi-Fi 6 双频无线 |
有 |
有 |
有 |
有 |
| 蓝牙 5.2/4.2/2.1 |
有 |
有 |
有 |
有 |
| 4G模组 |
无 |
有,CN/GB |
有,CN/GB |
有,CN/GB |
| 语音功能[5] |
无 |
有 |
有 |
有 |
| ISS 2.0 智能伴随 |
无 |
有 |
有 |
有 |
| 探物避障 |
有 |
有 |
有 |
有 |
| 充电桩回充 |
无 |
支持 |
支持 |
支持 |
| 二次开发[6] |
无 |
无 |
无 |
有 |
| 配件 |
手持式遥控器 |
选配 |
选配 |
有 |
有 |
| 高算力模组 |
无 |
无 |
无 |
选配NVIDIA Jetson Orin
(40-100Tops算力) |
| 智能电池 |
标准
(8000mAh)x1 |
标准
(8000mAh)x1 |
长续航
(15000mAh)x2 |
长续航
(15000mAh)x1 |
| 续航时间 |
约1-2h |
约1-2h |
约2-4h |
约2-4h |
| 充电器 |
标准(33.6V 3.5A) |
标准(33.6V 3.5A) |
快充(33.6V 9A) |
快充(33.6V 9A) |
| 保修期[7] |
半年 |
1年 |
1年 |
1年 |
[1] 12个关节电机,最大扭矩有差异,此为其中最大关节电机的最大扭矩
[2] 空旷无干扰无遮挡环境
[3] 不同无线网络环境下,会有比较大差异
[4] 8核高性能CPU: 能够支持更多模式,如前沿模式、AI模式、3D激光建图等
[5] 语音功能具体指离线式语音交互及指令、语音对讲、音乐播放
[6] 详细功能,请查看二次开发手册
[7] 更详细保修条款,请参见产品保修手册
[8] 以上参数,在不同业务场景、不同型号参数配置等情况,在应用中有所差异,请以实际为准
[9] 产品外观后续可能会有略微调整,请以届时实物为准
温馨提示:
-
限于目前技术和算力资源,部分功能需要人为操作或二次开发实现
-
本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
-
请访问宇树科技官网了解更多产品相关条款与政策,请遵守各地区法律法规。
配件列表
| | | | |
|---|
 |
 |
 |
 |
| 双手遥控器 |
Go2普通电池
8000mAh |
Go2长续航电池
15000mAh |
Go2充电器(慢充3.5A) |
 |
 |
 |
 |
| Go2充电器(快充9A) |
Go2足端 |
Go2充电桩 |
拓展坞(Orin Nano 8GB) |
|
 |
 |
 |
| |
|
|
|
| 拓展坞(Orin NX 16GB) |
带屏遥控器 双相机套装 |
舵机机械臂 |
带屏遥控器 双相机套装+三合一 |
 |
 |
 |
 |
| 视觉 Realsense D435i |
3D雷达(MID360) |
16线导航3D雷达(禾赛XT16) |
保护支架-小 |
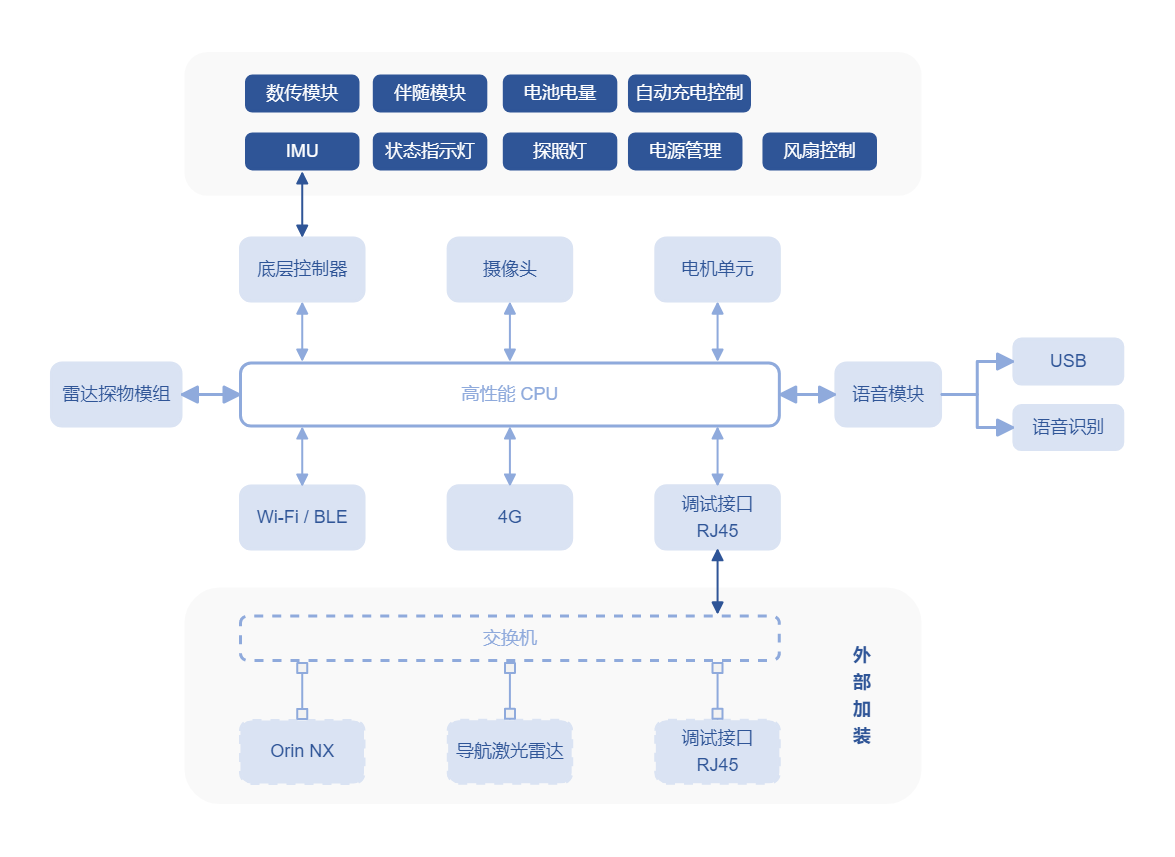
硬件架构
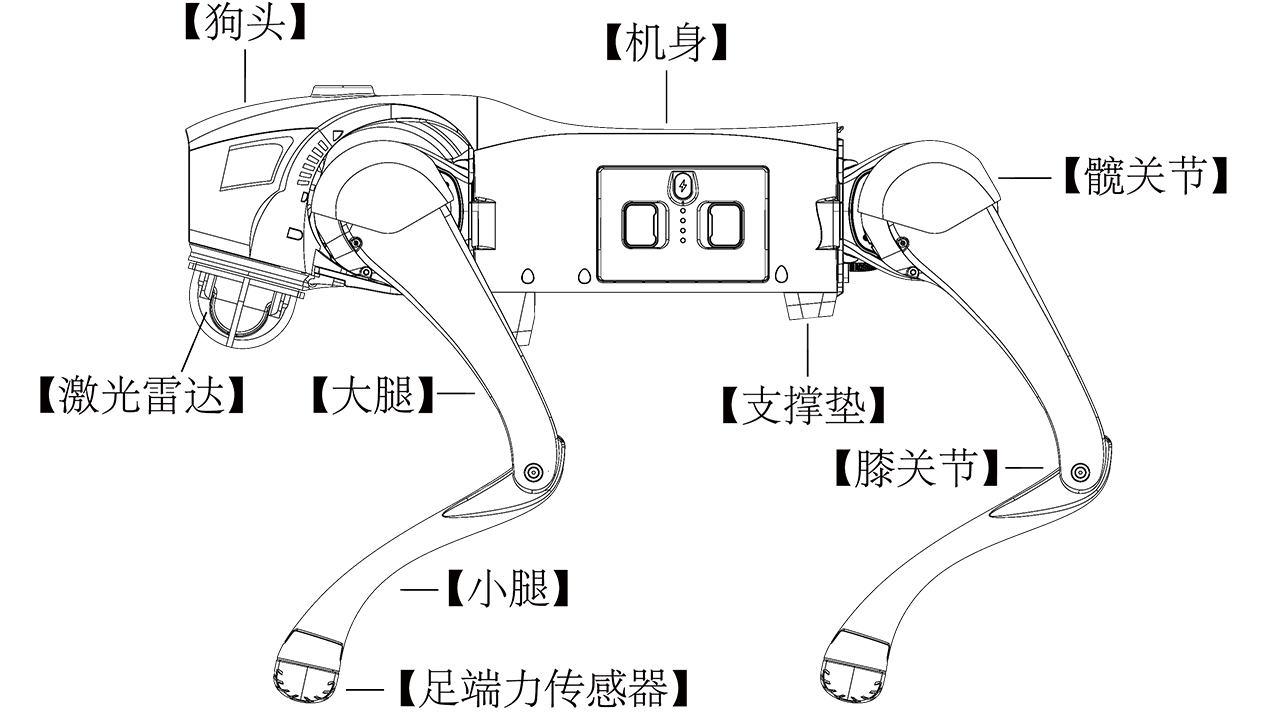
部件名称
GO2 EDU
 背部负载安装孔位图:单位 mm 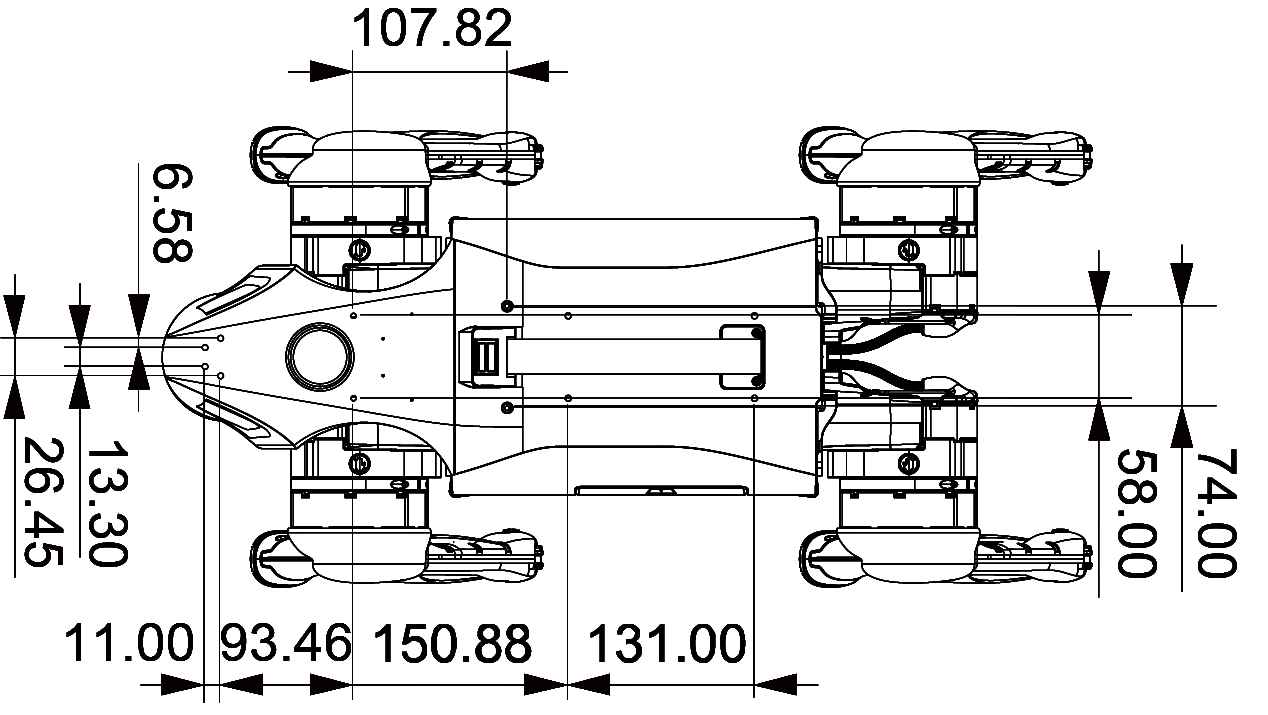
电气接口
DC 28.8V输出,连接Orin NX 8/16GB高算力模组BAT输入。
标准RJ45接口,连接User PC/Orin NX 8/16GB,RJ45以太网接口。
用于通用遥控器上的通讯连接,此接口不提供电源输出,接口定义(从左往右边):NC/GND/SBUS。
雷达
头部 4D LiDAR-L1 采用宇树 Unitree 自研 4D 雷达技术(3D 位置 +1D 灰度),它可以实现每秒 21600 次的高速激光测距采样,实时获取周围环境的三维信息,可用于运动避障,能够应付各种复杂路况!
| Unitree 4D LiDAR | |
|---|
| 型号 |
L1 |
| 尺寸 |
75(宽)x75(深)x65(高)mm |
| 供电电压 |
12V DC |
| 激光波长 |
905nm |
| FOV |
360°*90° |
指示灯
note
灯光优先级:伴随模式开启(紫灯常亮)>续航模式(黄灯常亮)>避障关闭(蓝灯常亮).
摄像头
头部相机支持720p,15fps,1080p,15fps双码流,摄像头具有1080P(HD)15fps或720p 15fps高清拍摄能力,通光孔径F2.2,视场角120°。可进行App高清图传,在无干扰无遮挡环境下,摄像头可以保证流畅的720p 15fps高清图传。
关节序号与关节限位
四足机器人像动物一样,身体(Trunk)和四肢(Leg)都是左右对称的。四条腿,按照前后分成两组,
这两组除了前后不同,坐标系和关节活动范围等都相同的。
| 腿和关节的序号: |
|---|
| Leg 0 :FR,右前腿 |
| Leg 1 :FL,左前腿 |
| Leg 2 :RR,右后腿 |
| Leg 3 :RL,左后腿 |
| Joint 0 :Hip,机身关节 |
| Joint 1 :Thigh,大腿关节 |
| Joint 2 :Calf,小腿关节 |
| e.g.FR_thigth:右前腿大腿关节 |
| 各关节限位: |
|---|
| 机身关节:-48°~48° |
| 大腿关节:竖直方向为0°,前进方向为正,后腿-260°~30°,前腿-200°~90° |
| 小腿关节: -156°~-48° |
 机身关节限位 机身关节限位
坐标系,关节旋转轴与关节零点
机身关节旋转轴为 x 轴,大腿关节和小腿关节的旋转轴为 y 轴,旋转正方向符合右手定则。
当各个关节均为零度时,各坐标系如上图。红色为 x 轴,绿色为 y 轴,蓝色为 z 轴。小腿关节由于限位,实际到不了这个位置,这里仅为了指明零点位置。可以看出,各个关节坐标系的初始姿态都是一致的,只是位置和旋转轴不同。
机器人规格
尺寸
| 参数 | 规格 |
|---|
| 裸机长宽高(站立) |
70cm*31cm*40cm |
| 裸机长宽高(趴下) |
76cm*31cm*20cm |
| 裸机净重(不含电池) |
约15kg |
| 自由度 |
12 |
| 最大速度 |
3.7m/s(极限 ~ 5m/s) |
环境
| 参数 | 规格 |
|---|
| 工作温度 |
5℃-35℃,天气良好环境下运行 |
| 斜坡 |
+/- 40° |
| 最大台阶高度 |
16cm |
| 照明 |
3W探照灯 |
电池相关
| 规格参数 | | |
|---|
| 电池型号 |
BT2-05 |
BT2-06 |
| 电池重量 |
2.5kg |
2.5kg |
| 电池容量 |
8000mAh,236.8Wh |
15000mAh,432Wh |
| 额定电压 |
DC 29.6V |
DC 28.8V |
| 充电限制电压 |
DC 33.6V |
DC 33.6V |
| 运行时长 |
1-2h |
3-5h |
| 充电方式 |
慢冲 |
快充/充电桩 |
| 充电电流 |
3.5A |
9A |
| 充电时长 |
2h |
1h"15 |
内部相关
| 规格参数 | |
|---|
| 处理芯片 |
8核处理器 |
| 4G |
内置贴片SIM卡 |
| Wi-Fi |
WiFi 6 双频无线802.11x |
| 蓝牙 |
5.2/4.2/2.1 |
| 存储空间 |
64G |
| 输出电源 |
DC 28.8V(电池电压) |
| 连接 |
RJ45以太网口 |
外部挂载
拓展坞
| 规格参数 | | |
|---|
| 型号 |
Orin Nano 8GB |
Orin NX 16GB |
| 供电电压范围 |
16-60V DC |
16-60V DC |
| 算力 |
支持可达40Tops算力 |
支持可达100Tops算力 |
| 拓展接口 |
USB3.0-Type A X1、 USB3.0-Type C X1 、USB2.0-Type C X1 、 千兆以太网口(标准RJ45)X2、 百兆以太网(GH1.25-4PIN)X1、 M8航插接口X1 |
USB3.0-Type A X1、 USB3.0-Type C X1 、USB2.0-Type C X1 、 千兆以太网口(标准RJ45)X2、 百兆以太网(GH1.25-4PIN)X1、 M8航插接口X1 |
激光雷达
Go2适配两款激光雷达,MID-360、禾赛XT16激光雷达可用于 Slam 导航。
| 规格参数 | | |
|---|
| 型号 |
MID-360激光雷达 |
XT-16激光雷达 |
| 尺寸 |
65mm*65mm*60mm |
Φ100.0 / 103.0 mm*76mm |
| 供电电压范围 |
9-27V DC |
9-36V DC |
| 激光波长 |
905nm |
905nm |
| FOV |
水平360°,竖直-7°~52° |
水平视场角 360°,垂直视场角30°(-15°~+15°) |
深度相机
| 规格参数 | |
|---|
| 型号 |
D435i |
| 尺寸 |
124mm*29mm*26mm |
| 最小深度距离 |
0.105米 |
| 深度图像分辨率 |
1280*720 @ 30fps;848*480 @ 90 fps |
| 深度视场角 |
86° * 57° (±3°) |
舵机机械臂
| 规格参数
| | | |
|---|
| 型号 |
D1 |
|
|
| 重量 |
约2.37kg |
|
|
| 自由度 |
6 |
|
|
| 负载 |
500g(理想重量) |
|
|
| 最大臂展 |
550mm(不含爪夹)
670mm(含爪夹) |
|
|
| 电源需求 |
24V 2.5A (MAX 5A) |
|
|
| 接口 |
DC5.5-2.1 |
|
|
| 电机类型 |
舵机 |
|
|
| 功率 |
60W |
|
|
| 控制接口 |
控制通信接口 RJ45 (ETH) |
|
|
| 关节参数 |
关节 |
运动范围 |
最大速度 |
| |
J1 |
±135° |
|
| |
J2 |
±90° |
|
| |
J3 |
±90° |
|
| |
J4 |
±135° |
|
| |
J5 |
±90° |
|
| |
J6 |
±135° |
|
带屏遥控器
| 规格参数
| |
|---|
| 遥控器 |
|
| 摄像头显示设备 |
5.5英寸1080P高清高亮 LCD 触摸显示屏 |
| 系统配置 |
Android 9.02G 运行内存,16G 存储空间 |
| 尺寸 (天线收起) |
189mm* 138mm*41 mm |
| 重量 |
850 g |
| 电池容量及类型: |
10200 mAh 7.4V 2S 离子电池 |
| 快充协议: |
PD 20W |
| 充电时间: |
5小时 (20W 快充) |
| 作业续航: |
13 小时 |
| 功能接口 |
视频输出:标准 HDMI*仅行业版本外接设备: USB-A充电: Type-C 固件升级:升级口 (底部 GH1.25 4Pin) 文件传输:Type-C/USB-A 移动网络:SIM 卡槽 外置存储:TF 卡槽/USB-A三脚架固定:1/4 螺纹孔 |
| 相机视角 |
FOV 120° |
| 双相机 |
|
| 产品尺寸 |
106mm*25mm*41mm |
| 重量 |
108g |
| 功耗 |
3W |
| 探照灯功率 |
8W |
| 光通量 |
1W/120~140lm |
| 探照灯类型 |
透光 |
带屏遥控器三合一
| 规格参数
| |
|---|
| 尺寸 |
270mm*143mm*133mm |
| 重量 |
690g±10g |
| 供电电压范围 |
16-60V |
| 亮度 |
3000lm |
| 出光角 |
15° |
| 功率 |
照明:30W ;喊话器:30W;红蓝:10W |
| 声音有效传输距离 |
500M |
| 声音最大传输距离 |
800M |
| 最大声压 |
130dB |
| 音频格式 |
mp3/wav/m4a/flac/aac |
| 控制方式 |
app(遥控器) |
| 功能 |
实时喊话 录音上传 音频播放 文字转语音 照明爆闪 照明常亮 照明亮度调节 红蓝爆闪 红蓝爆闪模式切换 |
|
| |
https://support.unitree.com/home/zh/developer |
 AI
AI 简体中文
简体中文
 搜索
搜索


 浙公网安备 33010602011771号
浙公网安备 33010602011771号