ROS Kinetic Ubuntu 16.04 安装
Ubuntu版本是16.04,安装的是kinetic
software&update那里,把软件源改成清华
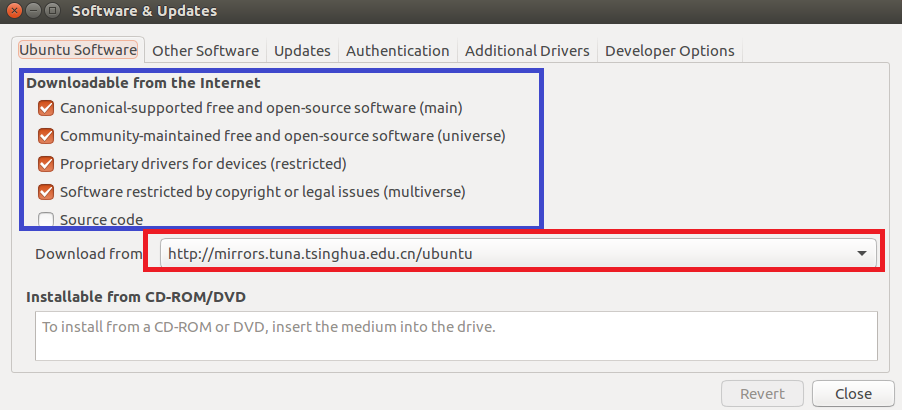
设置ros package的软件源为清华
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
此指令将在 /etc/apt/sources.list.d 文件夹内创建 ros-latest.list文件, 并添加ROS 软件源地址。
更新软件包索引
sudo apt-get update
新建 /etc/apt/sources.list.d/ros-latest.list,内容为:
deb https://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ xenial main
然后再输入如下命令,信任ROS的GPG Key,并更新索引:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 sudo apt update
安装ROS
sudo apt-get install ros-kinetic-desktop-full
初始化rosdep
在使用ROS之前,必须初始化rosdep。rosdep是一个通过在使用或编译ros的核心组件时轻松安装依赖包来增强用户便利的功能
sudo rosdep init
rosdep update
安装rosinstall
sudo apt-get install python-rosinstall
安装自己需要的程序
sudo apt-get install ros-kinetic-rqt* sudo apt-get install ros-kinetic-serial sudo apt-get install ros-kinetic-slam-gmapping sudo apt-get install ros-kinetic-map-server sudo apt-get install ros-kinetic-amcl sudo apt-get install ros-kinetic-navigation
建议自己安装navigation包,方便以后修改代码,期间需要安装 sudo apt-get install ros-kinetic-tf2-sensor-msgs
加载环境设置文件
添加ROS的环境变量,这样,当你打开你新的shell时,你的bash会话中会自动添加环境变量。
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc # 使环境变量设置立即生效 source ~/.bashrc
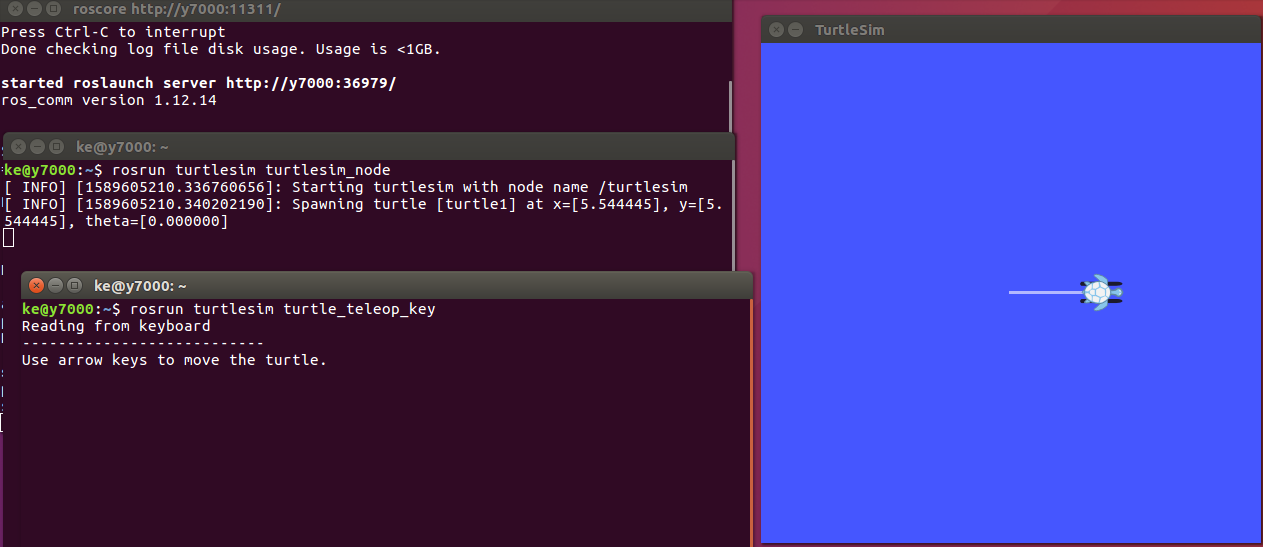
测试ROS
Terminal 分别执行每个指令,可以键盘遥控小乌龟移动
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
turtlebot环境检测
sudo apt-get install ros-kinetic-turtlebot* ros-kinetic-gazebo*
- 安装完成后,输入并运行roslaunch turtlebot_gazebo turtlebot_world.launch操作命令,系统会弹出Gazebo Simulator。第一次运行时,Gazebo Simulator内可能是漆黑一片,需耐心等待其加载完毕。最终可看到图中的Turtlebot机器人,如果想快速加载模型,可以参考博客 ROS Gazebo 加载模型失败问题
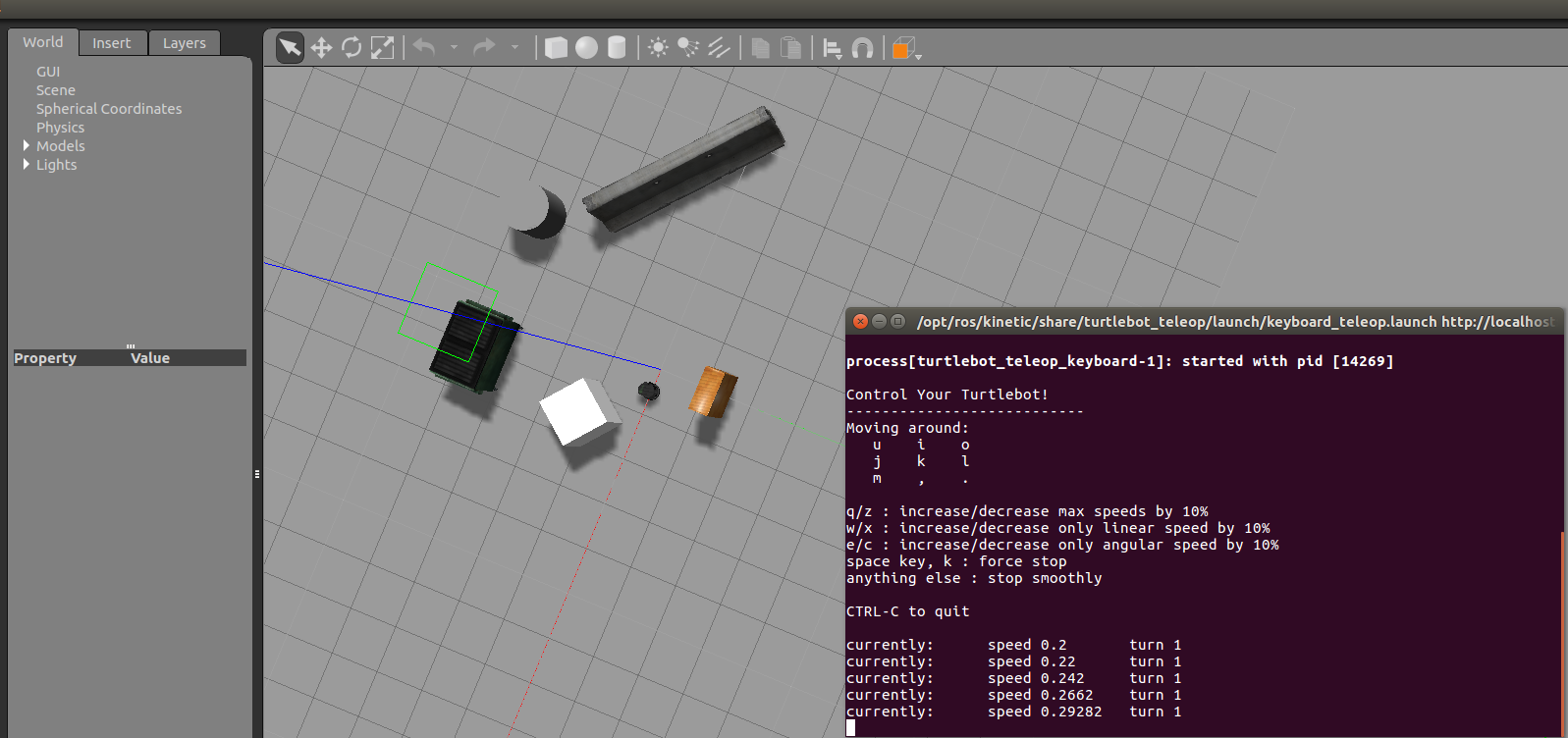
- 我们用Ctrl+Shift+T打开新的终端窗口,输入并运行roslaunch turtlebot_teleop keyboard_teleop.launch操作命令,用键盘控制Turtlebot的运动。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号