Realsense D435i Winodws和Linux开发环境配置
Due to the USB 3.0 translation layer between native hardware and virtual machine, the librealsense team does not support installation in a VM. If you do choose to try it, we recommend using VMware Workstation Player, and not Oracle VirtualBox for proper emulation of the USB3 controller.
不支持Virtualbox虚拟机连接Realsense使用
- 最高 1280×720 双目深度分辨率
- 最高 1920×1080 RGB 分辨率
- 最高 90 FPS 深度视频流。深度流与普通 RGB 视频流类似,只不过每个像素点的值不再是 RGB 或灰度值,而是物体相对于相机的距离。
- 只能对相同帧率的 RGB 与深度视频流做同步设置
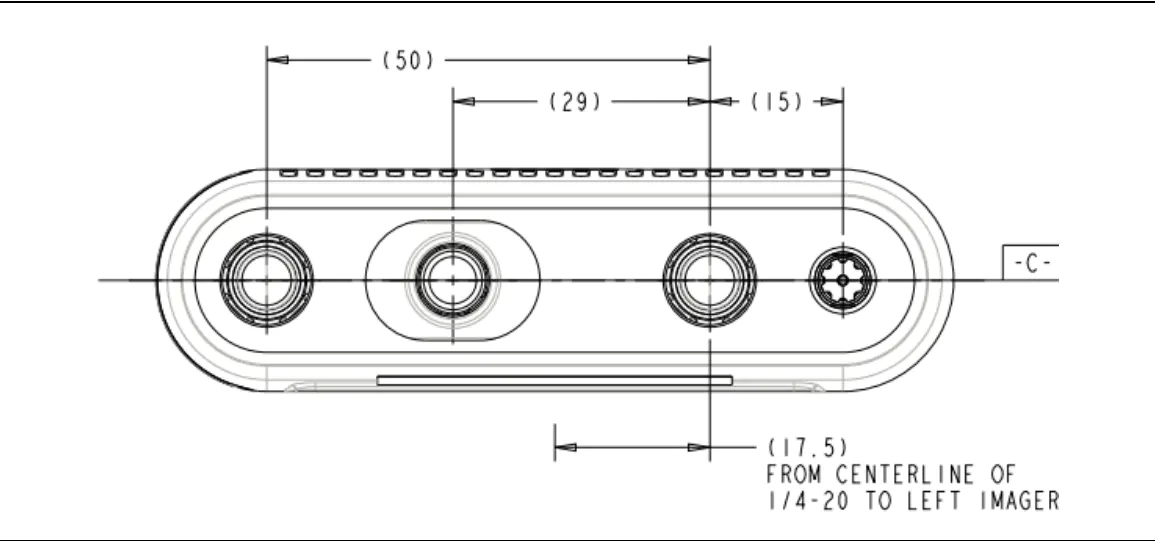
- 双目 baseline 为 50 mm
- 深度探测范围 0.2 m ~ 10 m
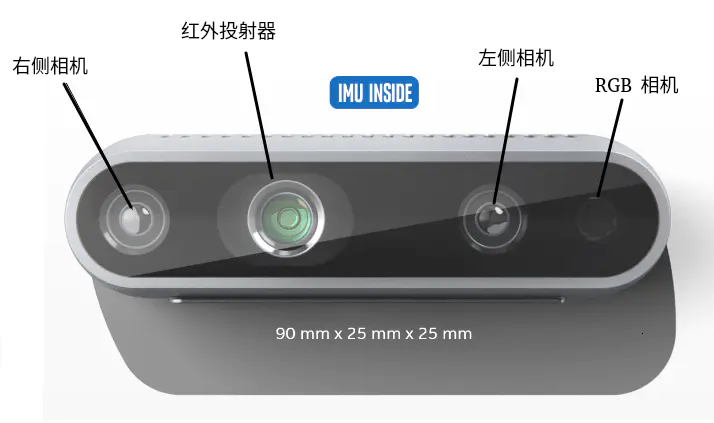
- 深度坐标系以左侧相机为中心(上图中 centerline of 1/4-20 是指三脚架螺丝空的中心)
- 内含一个 6 自由度的 IMU,对应刚体在三维空间中 6 种运动方式:前后、左右、上下的平移,以及绕刚体三个轴的旋转 —— 绕前后方向轴旋转 roll, 绕左右方向轴旋转 pitch, 绕上下方向轴旋转 yaw

 浙公网安备 33010602011771号
浙公网安备 33010602011771号