11 ROS 动态参数调节
博客转载:https://blog.csdn.net/weixin_42005898/article/details/100114870
1. 创建功能包(package)
cd ~/catkin_ws/src catkin_create_pkg dynamic_refg roscpp dynamic_reconfigure cd .. catkin_make
2. 向功能包添加动态重配置文件(.cfg)
roscd dynamic_refg mkdir cfg && cd cfg gedit My_cfg.cfg
- 2.1向My_cfg.cfg文件输入如下的内容
#!/usr/bin/env python
PACKAGE = "dynamic_refg"
from dynamic_reconfigure.parameter_generator_catkin import *
gen = ParameterGenerator()
gen.add( "int_param", int_t, 0, "An Integer parameter", 50, 0, 100)
gen.add( "double_param", double_t, 0, "A double parameter", .5, 0, 1)
gen.add( "str_param", str_t, 0, "A string parameter", "Hello World")
gen.add( "bool_param", bool_t, 0, "A Boolean parameter", True)
size_enum = gen.enum([ gen.const("Small", int_t, 0, "A small constant"),
gen.const("Medium", int_t, 1, "A medium constant"),
gen.const("Large", int_t, 2, "A large constant"),
gen.const("ExtraLarge", int_t, 3, "An extra large constant")],
"An enum to set size")
gen.add("size", int_t, 0, "A size parameter which is edited via an enum", 1, 0, 3, edit_method=size_enum)
exit(gen.generate(PACKAGE, "dynamic_refg", "My_cfg"))
代码详解
其中 gen = ParameterGenerator() 创建一个参数生成器对象
gen.add 加入不同的参数。其中gen.add(...)格式如下:
gen.add(name, type, level, description, default, min, max)
name: 参数的名称
type: 参数类型
level:一个传递给回调的位掩码
description: 一个描述参数
default: 节点启动的初始值
min: 参数最小值
max: 参数最大值
exit 生成必要的文件并退出
first parameter is namespace's name
second parameter is node's name
third parameter is the current file's name
在编译之前,必须运行
chmod a+x src/dynamic_refg/cfg/My_cfg.cfg
添加权限。
3. 修改CMakeLists.txt文件
将CMakeLists.txt文件的内容修改为如下所示:
cmake_minimum_required(VERSION 2.8.3)
project(dynamic_refg)
find_package(catkin REQUIRED COMPONENTS
dynamic_reconfigure
roscpp
rospy
std_msgs
)
## Generate dynamic reconfigure parameters in the 'cfg' folder
generate_dynamic_reconfigure_options(
cfg/My_cfg.cfg
)
catkin_package(
# INCLUDE_DIRS include
LIBRARIES dynamic_refg
CATKIN_DEPENDS dynamic_reconfigure roscpp rospy std_msgs
# DEPENDS system_lib
)
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
4.构建功能包,生成相关头文件
cd ~/catkin_ws catkin_make
5.向功能包添加动态重配置节点
node.cpp
#include <ros/ros.h>
#include <dynamic_reconfigure/server.h>
#include "dynamic_refg/My_cfgConfig.h"
void callback(dynamic_refg::My_cfgConfig &config)
{
ROS_INFO("Reconfigure Request: %d %f %s %s %d",
config.int_param,
config.double_param,
config.str_param.c_str(),
config.bool_param?"True":"False",
config.size);
}
int main(int argc, char **argv) {
ros::init(argc, argv, "node_dynamic_reconfigure");
dynamic_reconfigure::Server<dynamic_refg::My_cfgConfig> server;
dynamic_reconfigure::Server<dynamic_refg::My_cfgConfig>::CallbackType f;
f = boost::bind(&callback, _1); //绑定回调函数
server.setCallback(f); //为服务器设置回调函数, 节点程序运行时会调用一次回调函数来输出当前的参数配置情况
ROS_INFO("Spinning node");
ros::spin(); //服务器循环监听重配置请求,当服务器收到重配置请求的时候,就会自动调用回调函数
return 0;
}
6.修改CMakeLists.txt文件
将CMakeLists.txt文件的内容修改为如下:
cmake_minimum_required(VERSION 2.8.3)
project(dynamic_refg)
find_package(catkin REQUIRED COMPONENTS
dynamic_reconfigure
roscpp
rospy
std_msgs
)
generate_dynamic_reconfigure_options(
cfg/My_cfg.cfg
)
catkin_package(
# INCLUDE_DIRS include
LIBRARIES dynamic_refg
CATKIN_DEPENDS dynamic_reconfigure roscpp rospy std_msgs
# DEPENDS system_lib
)
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
add_executable(node src/node.cpp)
add_dependencies(node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(node
${catkin_LIBRARIES}
)
7.构建功能包,生成相关头文件
cd ~/catkin_ws catkin_make
8.构建功能包,运行动态重配置服务器节点程序
打开终端,输入:
rosrun dynamic_refg node

打开另一个终端,输入:
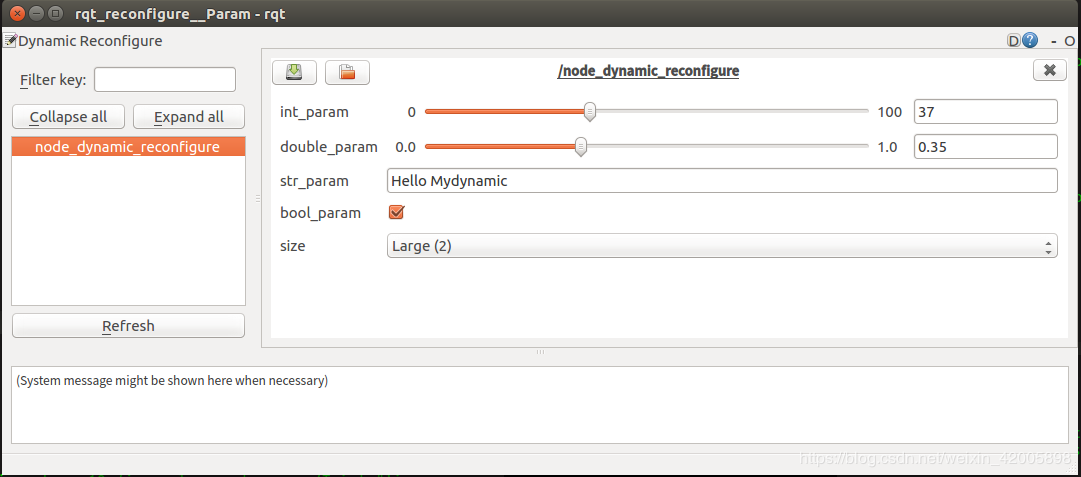
rosrun rqt_reconfigure rqt_reconfigure

 浙公网安备 33010602011771号
浙公网安备 33010602011771号