ros2 control 1
ros2 control framework
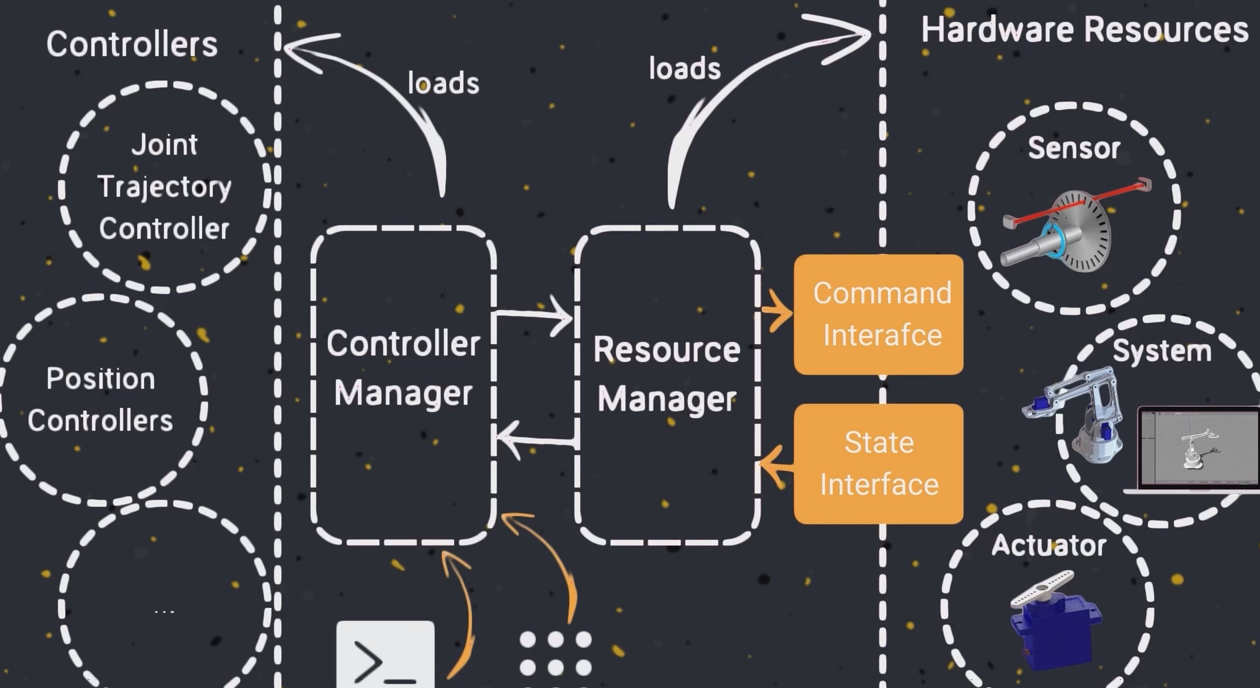
hardware resources包含各种传感器和执行器,can send command or retrieve information, such as position,velocity。
ros2 control 使用 Command interface发送指令,State interface接收消息。这两个接口由resources manager管理。
Controller manager可以加载ros2自带的controller来控制硬件。
以模拟control.xacro为例
在ros2_control标签内起个名字,type可以选sensor,actuator和system。在hardware标签内添加plugin,因为是模拟所以选用mock plugin。接着添加joint和sensor等部件,名字要与描述模型的urdf文件中的名字一直。在部件中按需求添加command_interface 和state_interface 来接收和发送消息。
点击查看代码
<ros2_control name="RRBotSystemWithSensor" type="system">
<hardware>
<plugin>mock_components/GenericSystem</plugin>
</hardware>
<joint name="joint1">
<command_interface name="position"/>
<state_interface name="position"/>
</joint>
</ros2_control>
在arduinobot_urdf.xacro中添加
<!-- the number of the joint to which transmission refers to -->
<xacro:macro name="default_transmission" params="number">
<transmission name="transmission_${number}">
<!-- simulation of transmission logic -->
<plugin>transmission_interface/SimpleTransmission</plugin>
<joint name="joint_${number}" role="joint1">
<!-- one degree of the motor corresponds to one degree of the robot arm -->
<mechanicalReduction>1.0</mechanicalReduction>
</joint>
<actuator name="motor_${number}" role="actuator1">
</actuator>
</transmission>
</xacro:macro>
在xacro添加了transmission后启动ros2 control library 和 gazebo的接口
添加arduinobot_gazebo.xacro 用来指定controller_manager
?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="arduinobot">
<gazebo>
<plugin filename="gz_ros2_control-system" name="gz_ros2_control::GazeboSimROS2ControlPlugin">
<robot_param>robot_description</robot_param>
<robot_param_node>robot_state_publisher</robot_param_node>
<parameters>$(find gz_ros2_control_demos)/config/cart_controller.yaml</parameters>
</plugin>
</gazebo>
</robot>
gz_ros2_control-system provides the following ros2_control interfaces:
- hardware_interface::JointStateInterface
- hardware_interface::EffortJointInterface
- hardware_interface::VelocityJointInterface
Use the tag <parameter> inside <plugin> to set the YAML file with the controller configuration and use the tag <controller_manager_name> to set the controller manager node name,default controller_manager
Joint Trajectory controller yaml file for using it could be:
点击查看代码
controller_manager:
ros__parameters:
joint_trajectory_controller:
type: "joint_trajectory_controller/JointTrajectoryController"
joint_trajectory_controller:
ros__parameters:
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
command_interfaces:
- position
state_interfaces:
- position
- velocity
state_publish_rate: 50.0
action_monitor_rate: 20.0
allow_partial_joints_goal: false
open_loop_control: true
constraints:
stopped_velocity_tolerance: 0.01
goal_time: 0.0
joint1:
trajectory: 0.05
goal: 0.03

 浙公网安备 33010602011771号
浙公网安备 33010602011771号