系统模型、分析与控制
参考资料
- 谷国迎、张伟军老师上课ppt 提取码: sjtu
1.Laplace变换
详细原理不多赘述,本博客数理方法有做介绍
这里放一张表格和两个总结

Laplace变换表
总结1.常用变换
| f(t) | F(s) | f(t) | F(s) |
|---|---|---|---|
| \(\delta(t)\) | \(1\) | \(e^{-at}u(t)\) | \(\frac{1}{s+a}\) |
| \(u(t)\) | \(\frac{1}{s}\) | \(sin(\omega t)u(t)\) | \(\frac{\omega}{s^2+\omega^2}\) |
| \(tu(t)\) | \(\frac{1}{s^2}\) | \(cos(\omega t)u(t)\) | \(\frac{s}{s^2+\omega^2}\) |
| \(t^nu(t)\) | \(\frac{n!}{s^{n+1}}\) | \(t^ne^{-at}u(t)\) | \(\frac{n!}{(s+a)^{n+1}}\) |
总结2.性质总结
- 线性:\(L[a·f(t)+b·g(t)]=a·F(s)+b·G(s)\)
- 时延:\(L\)
(暂且搁置,期末只考后半部分)
1.频域分析#
1.1指数函数的响应函数
设系统的传递函数为\(G(s)\),输入为\(u(t)=e^{s_{1}t}\)
例题:

1.2极坐标图/Nyquist图
传递函数\(G(j\omega)\)的极坐标图:\(\omega\)从\(0 \sim \infty\)变化时,表示在极坐标上的\(G(j\omega)\)的幅值和相位的关系图

系统类型与Nyquist图


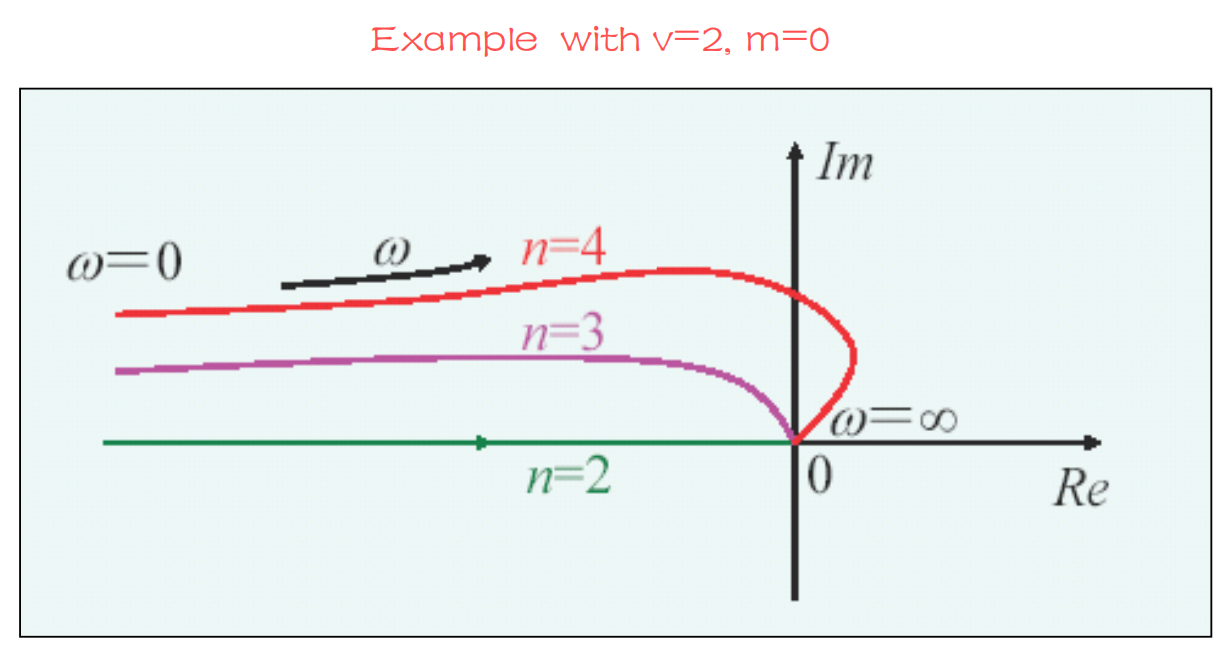
- Nyquist图的起点取决于系统类型
- Nyquist图的重点取决于\(n-m\)
1.3Bode图
Nyquist图的缺点
-
适量相乘Nyquist图表示不直观
-
不同的传递函数可能对应用一张Nyquist图
-
如果联合频率拓展到负值的情形,Lead和Lag补偿器没有明显的区别
-
幅值相位曲线中,无法定位到确切的零频值。
-
幅值曲线中,扩展了低频的表达细节,压缩了高频的表达细节,各有利弊。
-
手绘Bode图,幅值采用渐进线方式,相位采用某些关键频率点的相角值光滑连接的方式,是幅值及相位曲线的粗略表达。
-
将传递函数写成基本环节相乘的形式
-
确定基本环节的转角频率
-
按照渐近线连接对数幅值-频率曲线
-
渐近线之间采用曲线过渡
-
确定\(\omega =0,\omega =\infty\)以及中间点的相位
-
光滑连接相位曲线



- 低频部分只保留\(\frac{k}{s^{\nu}}\)
- 系统类型=开环极点\(s\)的数目
- 零点\(n-m\)值可以用高频段的频率获取
估计传递函数的步骤
- 确定基本环节的个数
- 确定转角频率
- 确定增益k
- 检查相位曲线是否符合所得传递函数
1.4频域稳定性
1.4.1频域稳定性判据(Nyquist稳定性判据)

针对单位负反馈系统:如果开环传递函数\(G(s)\)有\(k\) 个 \(s\)有伴平面几点,那么稳定性要求:$ G(j\omega) $ 的轨迹,当$ \omega $ 从 $ -\infty \(变化到\)\infty \(时候,曲线需要逆时针包围\)(-1+j_0,0)\(点\)k$次
即:
$N$:开环传递函数$G(s)Nyquist$曲线环绕$(-1+j_0,0)$点逆时针的圈数
$P$:开环传递函数$G(s)$右半平面的极点
1.4.2幅值裕量和相位裕量
Phase Margin(相位裕量)\(|G(j\omega_c)|=1,\gamma=180^\circ+\varphi(\omega_c)\)
Gain Margin(幅值裕量/增益裕量)\(\varphi(\omega_g)=180^\circ,k_g=\frac{1}{|G(j\omega_g)|}\)
1.4.3超前补偿器(主要作用于中频段)

- 对未补偿的系统画Bode图,明确不足的指标;
- 确定放大系数\(K_{ca}\) 满足静态误差要求;
- 根据新的放大系数,计算补偿量;
- 确定\(\alpha\), 附加\(5 \sim 12^\circ\) 额外的相位裕量;
- 根据幅值偏移决定\(T\);
- 检测是否满足指标。
1.4.4滞后补偿器(主要考虑低频段)
Tips:
- 滞后补偿器的放大部分可以提高稳态精度。\(\frac{1}{T}\)和\(\frac{1}{\beta T}\)应远离\(\omega_c\),从而避免对相位裕量产生较大的影响
- 减小\(\omega_c\)可获取相位裕量,提高精度,使动态性能变差,抑制噪声,方便情况下可取\(\beta =10\)
- 当\(\omega_c\)处倾斜度较大(-60)的时候可以考虑采用滞后补偿器
1.4.4滞后-超前补偿器
- 计算原开环传递函数的\(\omega_c \omega_g\)
- 得到相位差\(\phi_m\),计算\(\beta=\frac{1-\sin \phi_m}{1+\sin \phi_m}\)
- \(\omega_g=\omega_m,\frac{1}{T_2}=\frac{\omega_m}{2} \sim \frac{\omega_m}{10}\)
- 用\(\frac{-L(\omega_m)+20\log_{10} \beta}{\log_{10} \omega_m -\log_{10} \frac{1}{T_1}}=20\)计算得到\(T_1\)
1.5状态空间
矩阵描述

传递函数的计算
方块图转化为状态空间

标准型
能控标准型、能观标准型、对角标准型、Jordan标准型
状态转移矩阵
状态转移矩阵+初始状态可决定状态向量\(x(t)\)
对于齐次方程
对于非齐次方程
1.6能控性和能观性
能控性:对于线性定常系统,\(\dot{x}=Ax+Bu\),在有限的时间区间\((t_0,t_f)\)内,如果存在一个分段连续的输入\(u(t)\),使某一任意初始状态\(x(t_0)\)可转移到另一终端状态\(x(t_f)\),则称系统是能控的
能控性只回答能或者不能的问题,不解决怎样控制的问题
系统完全能控要求能控性矩阵满秩:
能观性:对于线性定常系统,\(\dot{x}=Ax+Bu \ x(t_0)=x_0 \ y=Cx\),在有限的时间区间\((t_0,t_f)\)内,能否根据该时间区间内的输出\(y(t)\)确定系统的初始状态\(x(t_0)\)
系统完全能观要求能观性矩阵满秩:
镇定:对于部分能控系统,如果不能控的部分是稳定的,不稳定的部分是能控的,则整个系统是镇定的。
能检测的:对部分能观的系统,如不能观的部分是稳定的,不稳
定的部分是能观的,则称该系统为能检测的。
1.7状态反馈

此时\(K\):状态反馈增益矩阵
极点配置法:必要条件是系统完全可控
阶数小于3的求解:
将矩阵\(K\)带入特征多项式求解
通过\(s\)的对应系数相等可求得\(K\)
1.8状态观测器

阶数小于3的求解:
将矩阵\(K_e\)带入特征多项式求解
通过\(s\)的对应系数相等可求得\(K_e\)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号