
UDS协议栈的技术解析
一、协议栈分层架构
UDS协议栈基于ISO 14229标准构建,采用分层设计实现跨总线兼容性,典型架构包含五层:
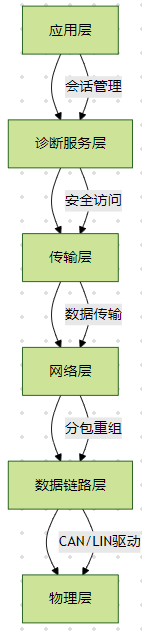
1. 物理层
- 总线支持:CAN(ISO 11898)、LIN(ISO 17987)、以太网(DoIP)
- 硬件接口:MCU的CAN控制器、LIN收发器、以太网MAC
2. 数据链路层
- CAN帧处理:8字节数据包收发,ID过滤机制
- LIN主从控制:NAD(节点地址)寻址,总线唤醒
3. 网络层(ISO 15765-2)
-
多帧传输: 单帧(SF):≤7字节数据 首帧(FF):声明数据长度(12位) 流控帧(FC):控制传输速率(BS块大小/STmin间隔) 连续帧(CF):按序列号(SN)传输数据块
-
定时参数:
#define N_As_TIMEOUT 25 // 发送方超时(ms) #define N_Br_TIMEOUT 150 // 接收方超时(ms) #define STMIN_DEFAULT 5 // 最小间隔时间(ms)
4. 传输层(ISO 14229-2)
- 诊断服务路由:物理寻址(0x7DF)与功能寻址(0x7E0-0x7E7)
- 缓冲区管理:环形缓冲区处理多帧重组
5. 应用层(ISO 14229-1)
- 核心服务:26种标准化服务(6大类)
- 会话管理:默认/编程/扩展会话状态机
二、核心服务功能
1. 诊断会话控制(0x10服务)
typedef enum {
DEFAULT_SESSION = 0x01,
PROGRAM_SESSION = 0x02,
EXTEND_SESSION = 0x03
} SessionType;
uint8_t UDS_DiagnosticSessionControl(uint8_t subFunc) {
switch(subFunc) {
case 0x01: // 默认会话
SetSession(DEFAULT_SESSION);
return 0x50; // 正响应
case 0x03: // 扩展会话
StartSessionTimer(S3_TIMEOUT);
return 0x50;
default:
return 0x12; // 子功能不支持
}
}
2. 安全访问(0x27服务)
uint8_t Seed[4] = {0x12,0x34,0x56,0x78}; // 种子值
uint8_t Key[4];
uint8_t UDS_SecurityAccess(uint8_t subFunc) {
if(subFunc == 0x01) { // 请求种子
SendSeed(Seed);
return 0x67; // 正响应
} else if(subFunc == 0x02) { // 验证密钥
if(ValidateKey(Key)) {
UnlockServices();
return 0x67;
}
}
return 0x33; // 安全访问拒绝
}
3. 数据读写服务
-
读取数据流(0x22):
uint8_t ReadData(uint16_t DID) { if(DID == 0xF190) { // VIN码 return ReadVIN(); } return 0x31; // 请求超出范围 } -
写入配置(0x2E):
uint8_t WriteData(uint16_t DID, uint8_t* data) { if(!IsProgrammingSession()) return 0x7E; // 会话无效 return WriteEEPROM(DID, data); }
三、通信机制实现
1. 请求-响应流程
Tester → ECU: 02 10 03 00 (进入扩展会话)
ECU → Tester: 06 50 03 00 32 01 F4 (正响应)
Tester → ECU: 03 27 01 (请求安全访问)
ECU → Tester: 07 67 12 34 56 78 (发送种子)
Tester → ECU: 07 67 22 34 56 78 (验证密钥)
ECU → Tester: 06 67 00 (解锁成功)
2. 多帧传输处理
// 首帧处理
void HandleFirstFrame(uint8_t* data) {
uint16_t length = (data[1]<<8) | data[2];
SendFlowControl(FC_CONTINUE, 8, 5); // 允许发送8帧,间隔5ms
}
// 连续帧处理
void HandleConsecutiveFrame(uint8_t sn, uint8_t* data) {
if(sn != expectedSN++) return; // 序列号校验
memcpy(buffer + sn*8, data, 7);
}
四、错误处理机制
1. 负响应码(NRC)
| NRC码 | 含义 | 处理策略 |
|---|---|---|
| 0x10 | 服务不支持 | 返回错误日志 |
| 0x12 | 子功能不支持 | 关闭当前会话 |
| 0x22 | 请求超出范围 | 校验参数合法性 |
| 0x31 | 内存地址无效 | 终止数据传输 |
| 0x72 | 一般编程错误 | 回滚操作并复位ECU |
2. 异常恢复策略
void HandleCommunicationError(uint8_t error) {
switch(error) {
case NRC_TIMEOUT:
RestartSessionTimer();
break;
case NRC_SEQUENCE_ERROR:
ResynchronizeSN();
break;
case NRC_HARDWARE_FAULT:
EnterSafeState();
break;
}
}
五、总线适配实现
1. CAN总线优化
// CAN接收中断处理
void CAN_RX_IRQHandler() {
CanRxMsgTypeDef msg;
HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &msg);
if(msg.StdId == 0x7DF) { // 功能寻址
ProcessDiagnosticRequest(msg.Data);
} else if(msg.StdId == 0x7E0) { // 物理寻址
HandlePhysicalAddressing(msg.Data);
}
}
2. LIN总线扩展
// LIN从站响应
void LIN_Slave_Response() {
if(NAD == 0x01) { // 测试仪地址
SendLINFrame(0x3C, response_data);
}
}
参考代码 UDS协议栈 www.youwenfan.com/contentcnm/70202.html
六、性能优化方案
-
DMA传输:
// CAN DMA配置 hdma_can_rx.Instance = DMA1_Stream0; hdma_can_rx.Init.Direction = DMA_PERIPH_TO_MEMORY; HAL_DMA_Init(&hdma_can_rx); -
环形缓冲区:
#define RX_BUFFER_SIZE 128 uint8_t rx_buffer[RX_BUFFER_SIZE]; volatile uint16_t rx_head = 0, rx_tail = 0; -
看门狗定时:
void WDG_Reset() { HAL_IWDG_Refresh(&hiwdg); }
七、典型应用场景
-
产线检测: VIN码烧录(0x34/0x36服务) ECU功能验证(0x19故障码读取)
-
售后诊断: 故障码清除(0x14服务) 执行器测试(0x2F服务)
-
OTA升级:
// 固件下载流程 UDS_RequestDownload(0x01, 0x1000, 0x2000); // 请求下载 UDS_TransferData(0x01, firmware_data); // 分块传输 UDS_RequestTransferExit(0x01); // 完成传输
八、调试与验证
-
CANoe仿真: 配置诊断会话模板 注入故障帧测试容错能力
-
日志分析:
[2025-10-17 14:30:00] [DBG] Received 0x10 request [2025-10-17 14:30:00] [ERR] NRC 0x12: Sub-function not supported -
单元测试框架:
void test_UDS_SessionControl() { uint8_t response[8]; UDS_ProcessRequest(0x10, 0x02, 0x00, response); TEST_ASSERT_EQUAL(0x50, response[1]); }
通过上述架构设计和实现策略,UDS协议栈可满足汽车电子系统从基础诊断到复杂编程的全生命周期需求。实际开发中需结合具体ECU硬件特性进行参数调优,并通过CANoe等工具进行协议一致性验证。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号