

制作的简易SCARA 机器人的控制资料 +“一个水平轴 + 两个旋转轴”
一、SCARA 机器人
“一个平动轴 + 两个旋转轴”,在工业机器人领域最常用的名称是:
SCARA 机器人
这个名字是英文“Selective Compliance Assembly Robot Arm”的缩写,意思是“选择性柔顺装配机器人手臂”。
为什么它叫 SCARA?
这要从它的机械结构和工作原理来解释,这正好对应了您说的“一个水平轴 + 两个旋转轴”:
-
两个旋转轴:通常位于机器人的“肩膀”和“肘部”。这两个关节在水平面内旋转,决定了机器人末端在XY平面内的位置。
-
一个水平轴:这是机器人的第三个关节,是一个直线轴,负责末端执行器在Z轴方向的上下运动。
“选择性柔顺” 指的是:
-
在水平面(XY方向)刚性很强:能够抵抗侧向力,保持精确定位。
-
在垂直方向(Z方向)具有一定的柔顺性:当进行装配作业(如插入零件)时,如果遇到微小的位置偏差,它可以依靠这个方向的轻微柔顺性来自动对准,从而避免卡死或损坏零件。
这个特性使得SCARA机器人特别擅长您描述的这类工作。
其他可能的叫法(但不常用)
虽然SCARA是最标准、最专业的称呼,但根据上下文,也可能被不太准确地称为:
-
平面关节型机器人:这是从它的结构形态来描述的,因为其主要运动关节在一个平面内。
-
装配机器人:这是从其最广泛的应用领域来称呼的。
总结
所以,当您提到“一个水平轴+两个旋转轴”的机械臂时,最准确、最专业的答案就是 SCARA 机器人。它在电子、半导体、汽车零部件等行业的快速拾放、精密装配领域应用极为广泛。
二、机电参数
2.1水平面(XY方向)
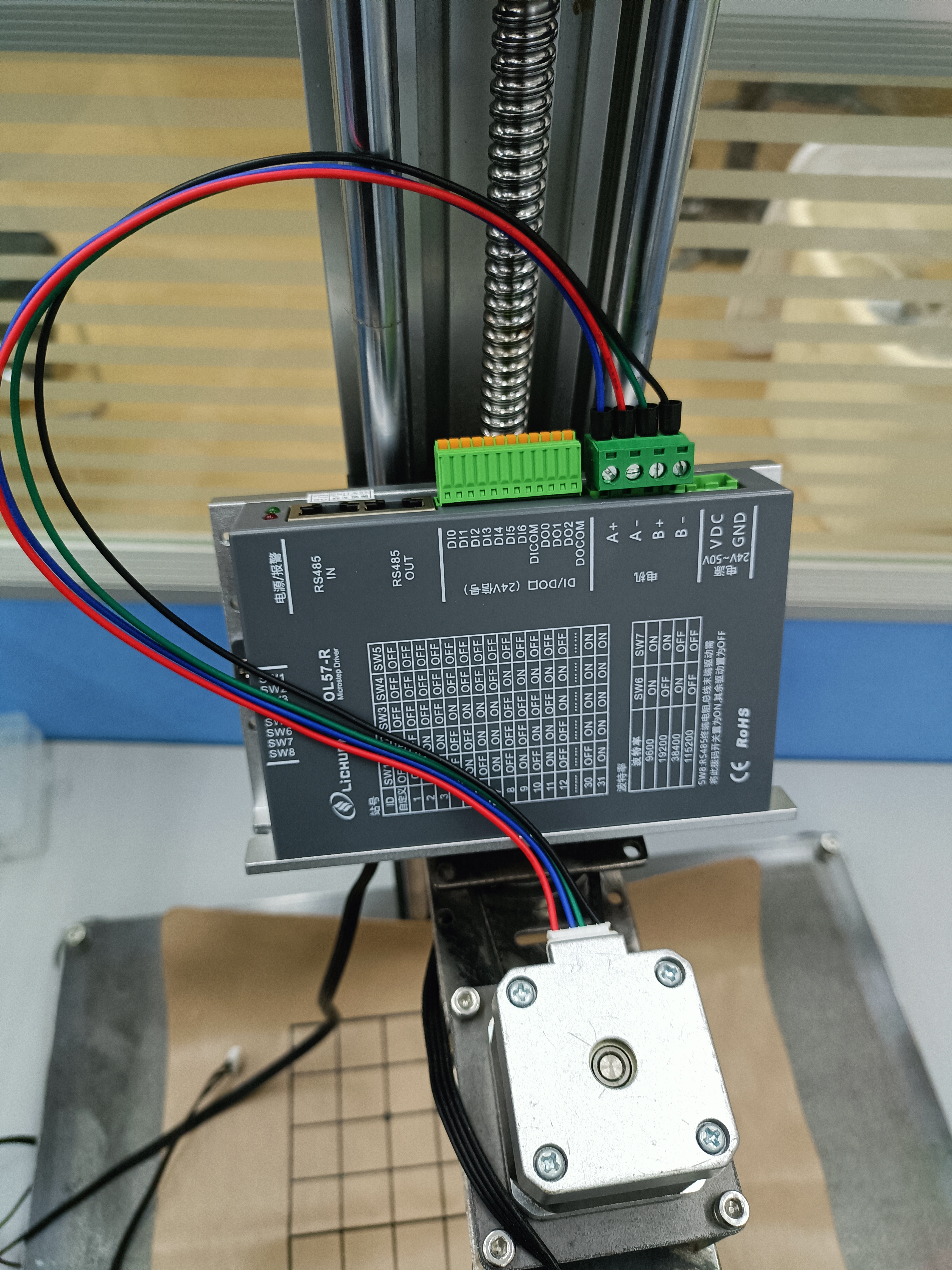
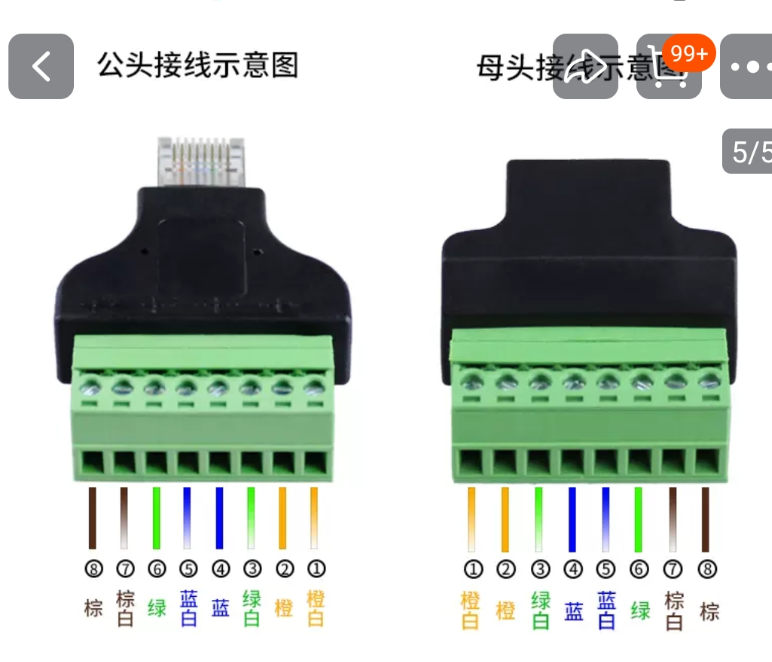
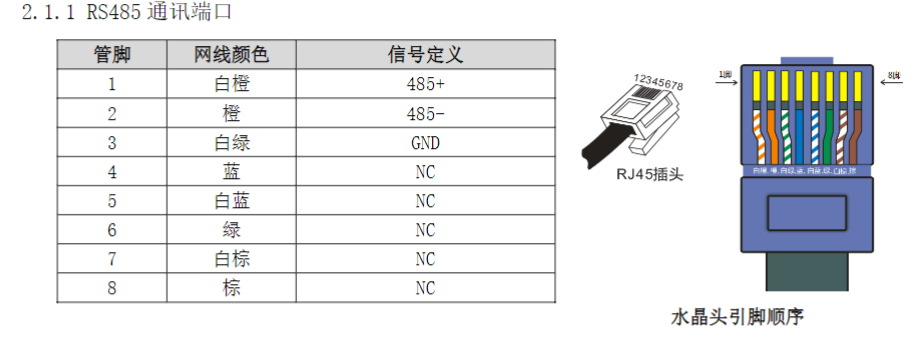
2.1.1、旋转轴电机与驱动器接线:
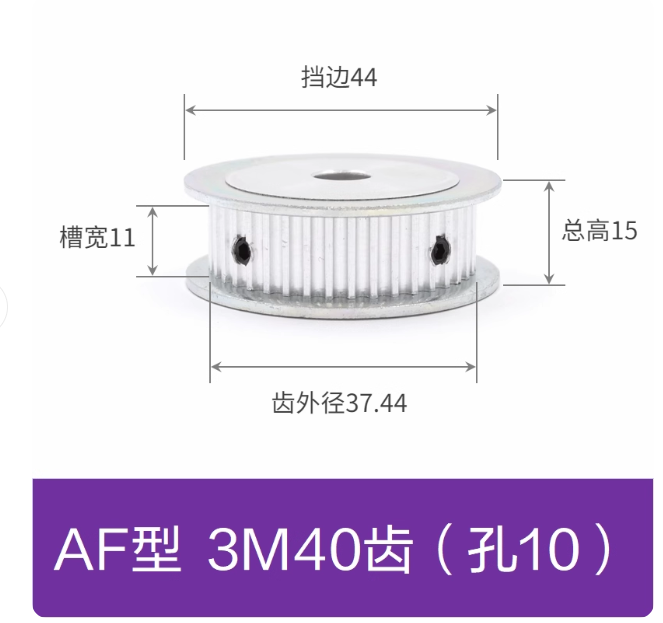
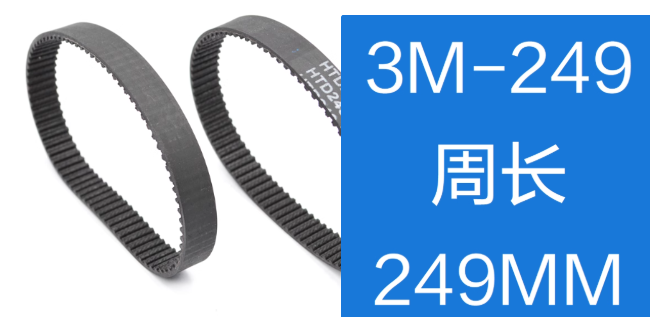
2.1.2 同步轮传动
驱动轮:带台阶3M15齿 孔5

从动轮:两面平3M40齿 孔10
同步带3M249
2.1.3 步进电机驱动

通过网盘分享的文件:SCADA机器人资料 链接: https://pan.baidu.com/s/1AFsStst9R861eTTOH41Gfw?pwd=aiot 提取码: aiot
2.2 垂直方向(Z方向)
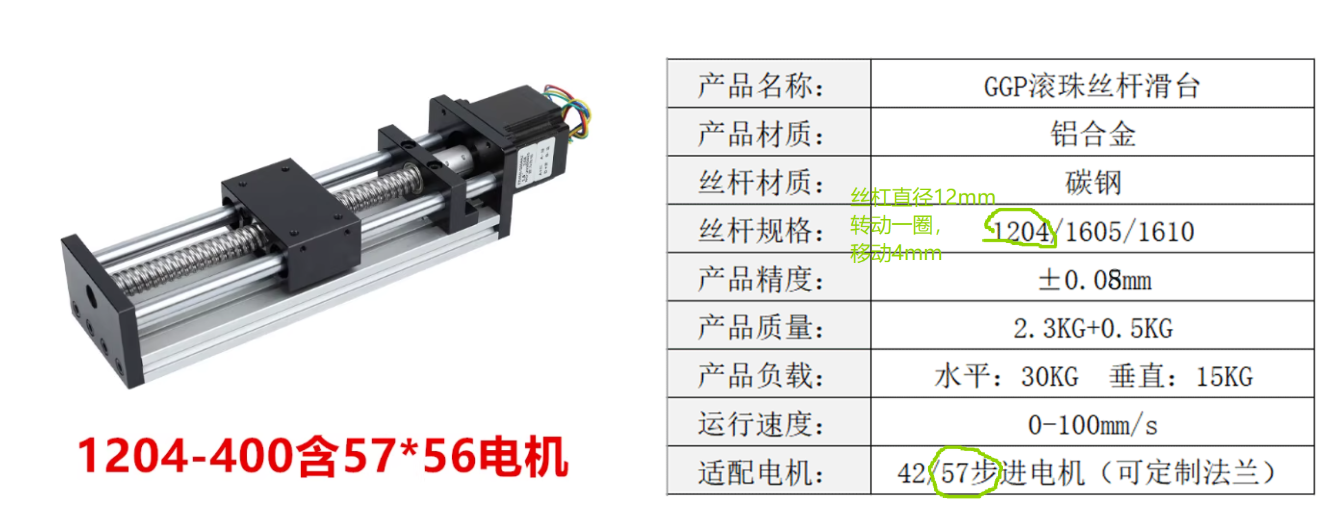
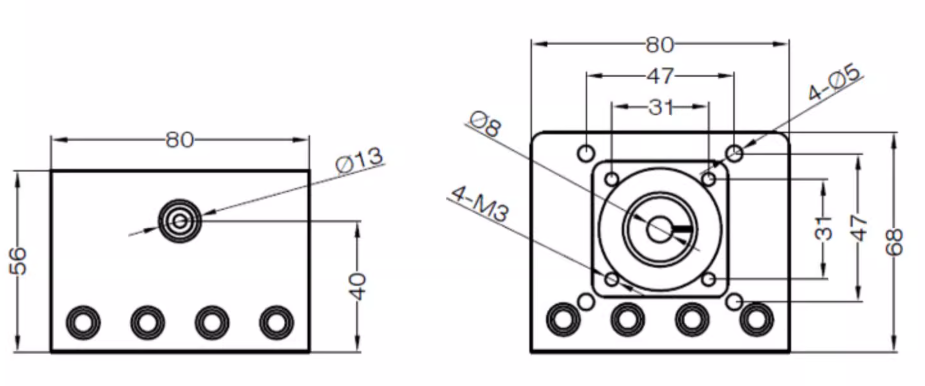
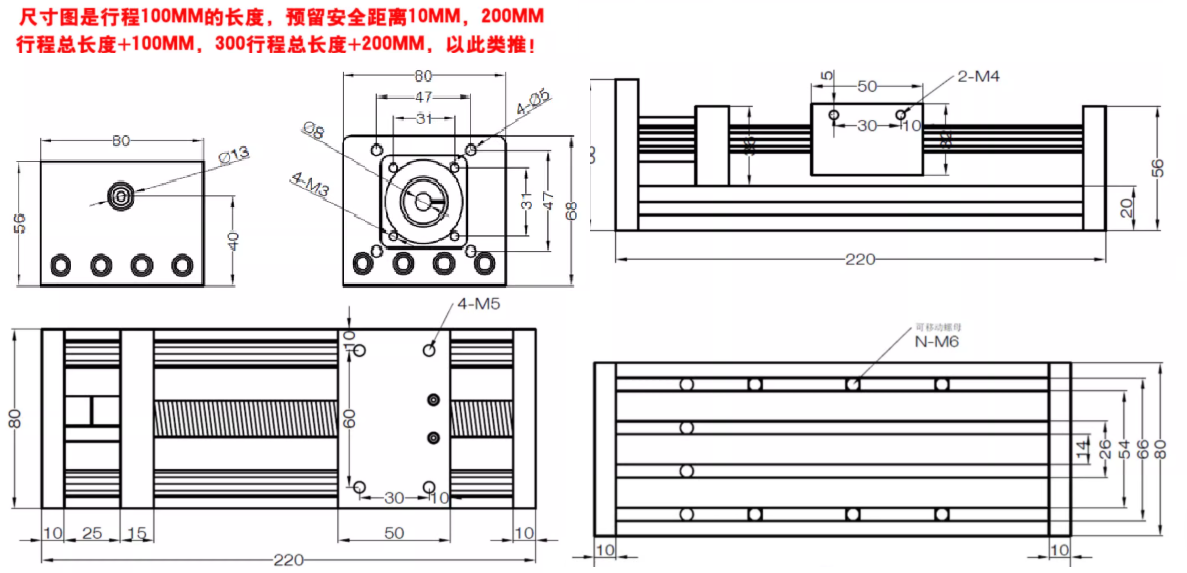
2.2.1 GGP双光轴滚珠丝杆滑台 电动丝杠滑轨传动滑台
2.2.2 ZDT 电机驱动板
电子资料地址:
https://pan.baidu.com/s/1c-ksbvdsLk5-L4nPd5BeTw?pwd=ijay 提取码: ijay 《步进闭环驱动资料》
3 实物照片


 浙公网安备 33010602011771号
浙公网安备 33010602011771号