八叉树地图的构建
本文写于2020年11月5日
背景
自己虽然用过很多次八叉树地图,但是对于其概率的计算方式一直有些含糊,因此决定重新读一遍论文,来了解其原理。
论文
Hornung, Armin, et al. "OctoMap: An efficient probabilistic 3D mapping framework based on octrees." Autonomous robots 34.3 (2013): 189-206.
正文
3 OctoMap mapping framework
3.1 Octree
- Octree 是一个有层次的数据结构。
- Octree 中的每个Node表示空间中的一个立方体,也称为一个voxel。这个立方体会被递归地分为八个块,直到每个块达到最小的尺寸。
- 当node的状态只有占据与free两种状态时,一个比较好的剪枝方法为,当一个node的所有children都是同一个状态,则这些children可以被裁剪掉
3.2 Probabilistic sensor fusion
给定\(1:t\)时刻的观测值\(Z_{1:t}\),则叶子节点n的占据(后验)概率\(P(n|z_{1:t})\)为
这个式子涉及三个概率:
- \(P(n|z_t)\)为根据当前测量得到的栅格n的占据概率
- \(P(n|z_{1:t-1})\)为历史的占据概率。
- \(P(n)\)为其先验概率
正常情况下,设置先验概率为0.5,然后利用log-odds表示,则上式可以表示成
其中
由于log-odds是可以转换成概率的,因此每个node不再直接存储概率,而是直接存储log-odds value。
注意到log-odds值是可以无限叠加的,所以当一个node被观测到k次占据后,至少也得要k次非占据的观测才能改变该node的占据状态。这个性质在环境物体是静态的时候是可以的,但是当环境是高度动态的时候,会导致地图的更新过于缓慢。因此,通常给log-odds函数人为设置取值上下限(称为Clamp),如下式所示。
3.3 Multi-resolution queries
当点云的测量值给出的时候,概率值是只在八叉树的叶子节点更新的。而父节点的占据概率更新可以有两种方式
- 平均占据概率
- 最大占据概率
为了在机器人的导航中获得一条没有碰撞的路线,通常采用策略2。
3.4 Octree map compresson
在3.1节提到的剪枝策略是针对node状态只有0或者1而言的。当node中存储的是log-odd值时,就不能直接这么操作了。
该文提出的方法是,将log-odd值达到clamp的上界或者下界的node视为稳定的node。当一个node的四个children均为稳定,且状态相同,即可进行裁剪。并且,当有新的测量使得该node的状态发生变化的时候,该node的childern又会被重新创建。
3.5 Extensions
Octree的节点可以被拓展以用来存储其他信息,例如颜色等。
本文还设计了一个软件,用来分割八叉树模型。
4 Implementation details
4.1 Memory-efficient node implementation
为了节约八叉树的存储空间,文章采取了以下措施:
- 首先,每个node的位置信息和size信息是在遍历的时候可以得到的,因此这些信息不会被存储在node中。
- 其次,每个node里只保存一个指向children指针数组 的指针。当这个node为leaf时,该指针为空;否则,指向一个由八个指针组成的数组。
- node的占据信息用一个float来存储。
- 由于虚继承会导致虚函数表指针的创建,因此,只在octree类使用虚继承,而在octree node类中不使用虚继承。
4.2 Octree types
类之间的继承关系如下所示。
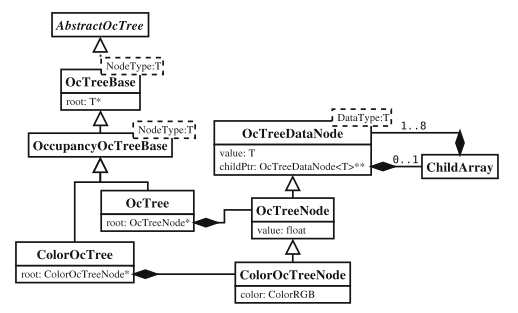
在目前的实现中,树的最大深度被设置为16,从而导致当分辨率为1cm时,八叉树只能表示长宽高为655.36m的区域。但是可以修改树的最大深度为32,使得区域大大扩大。
4.3 Map file generation
这里讲的是如何紧致地存储地图哈。暂时用不着。
4.4 our OctoMap implementation
4.4.1 Integrating sensor measurements
测量量使用\(insertRay()\)方法来更新ocTree。这个方法使得从机器人到测量值的终点(除终点以外)的voxel为free,而终点所在的vocel为occupied.
\(insertScan()\)方法则是一个优化后的批量方法,比单独trace每一条ray速度块很多。
\(updateNode()\)方法是根据某个点测量,单独更新octree的某个Node。
4.4.2 Accessing data
- 通过坐标可以查找到某个node
- Octomap实现了迭代器,可以查找任何node,任何叶子节点以及任何bounding box内的叶子节点。
- 还提供了\(castRay()\)方法来供用户查询ray intersection。(即查询一束光线首次hit到的占据的volume)
Evaluation
5.1 Sensor model for laser range data
log-odds的值可以设置为:
- \(l_{occ} = 0.85\)
- \(l_{free} = -0.4\)
以对应occupied与free的概率分别为0.7与0.4
clamping threshold为\(l_{min}=-2\),\(l_{max}=3.5\)。
当一个激光雷达在摇摆的时候,某些本该是占据的栅格会被认为是free的,如下图所示。
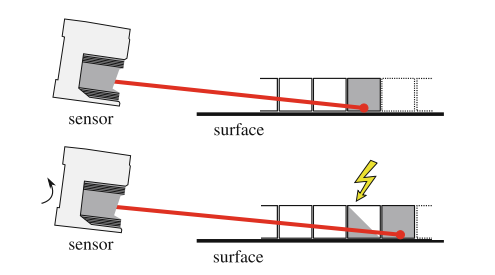
为了解决这个问题,整个sweep的点云会被叠加到一起,再塞入到octomap中去。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号