电动助力转向(EPS)系统Simulink模型构建与应用
一、EPS系统Simulink模型整体架构
电动助力转向(EPS)系统的Simulink模型需涵盖整车动力学、转向柱传动、EPS执行机构及控制系统四大核心模块,形成闭环仿真体系。整体架构如图1所示(参考):
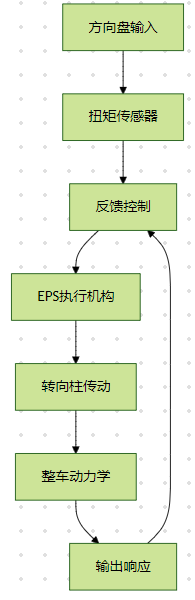
模块说明:
- 方向盘输入:模拟驾驶员施加的扭矩(如阶跃信号或正弦信号);
- 扭矩传感器:检测方向盘扭矩,输出电信号;
- 控制系统:根据车速和扭矩信号,通过逻辑门限值或PID算法计算助力扭矩;
- EPS执行机构:模拟电机、减速器等部件,将电能转换为机械助力;
- 转向柱传动:模拟转向柱的扭转刚度和阻尼,传递扭矩至车轮;
- 整车动力学:模拟车辆的横摆、侧向运动,输出响应(如横摆角速度、侧向加速度)。
二、核心模块建模细节
1. 整车二自由度动力学模型
整车二自由度模型是EPS系统仿真的基础,描述车辆的横摆运动和侧向运动,运动方程如下(参考):
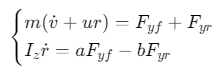
其中:
- \(m\):车辆质量(kg);
- \(v\):侧向速度(m/s);
- \(u\):纵向速度(m/s);
- \(r\):横摆角速度(rad/s);
- \(F_{yf},F_{yr}\):前后轮侧向力(N);
- \(I_z\):绕z轴转动惯量(kg·m²);
- \(a,b\):质心到前、后轴的距离(m)。
Simulink实现:
- 使用
Integrator模块求解微分方程; - 通过
Gain模块实现参数(如\(m,I_z,a,b\))的缩放; - 用
Sum模块组合侧向力和横摆力矩。
2. 转向柱传动模型
转向柱模型需模拟扭转刚度和阻尼,传递方向盘扭矩至EPS执行机构,方程如下(参考):

其中:
- \(T_handwheel\):方向盘扭矩(N·m);
- \(T_input\):驾驶员输入扭矩(N·m);
- \(K_stiffness\):转向柱扭转刚度(N·m/rad);
- \(B_damping\):转向柱阻尼系数(N·m·s/rad);
- \(θ_upper,θ_lower\):上、下转向柱角度(rad)。
Simulink实现:
- 使用
Torsional Spring模块模拟扭转刚度; - 使用
Damper模块模拟阻尼; - 通过
Sum模块组合输入扭矩、弹性扭矩和阻尼扭矩。
3. EPS执行机构模型
EPS执行机构包括电机、减速器等部件,动力学方程如下(参考):
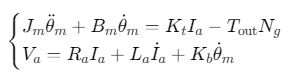
其中:
- \(J_m\):电机转动惯量(kg·m²);
- \(B_m\):电机阻尼系数(N·m·s/rad);
- \(K_t\):电机扭矩常数(N·m/A);
- \(I_a\):电枢电流(A);
- \(T_out\):输出扭矩(N·m);
- \(N_g\):减速比;
- \(V_a\):电枢电压(V);
- \(R_a\):电枢电阻(Ω);
- \(L_a\):电感(H);
- \(K_b\):反电动势常数(V·s/rad)。
Simulink实现:
- 使用
DC Motor模块模拟电机(内置扭矩-电流、电压-反电动势关系); - 使用
Gear模块模拟减速器(设置减速比Ng); - 通过
Sum模块组合电机扭矩与负载扭矩。
4. 控制系统模型
控制系统是EPS系统的核心,需根据车速和方向盘扭矩计算助力扭矩。常用的控制策略包括逻辑门限值控制和PID控制。
(1)逻辑门限值控制算法
逻辑门限值控制根据车速和扭矩信号,分阶段调整助力大小,代码如下(参考):
function [assist_torque] = assist_control(hand_torque, vehicle_speed)
% 参数设置
low_speed = 10; % 低速门限(km/h)
high_speed = 60; % 高速门限(km/h)
max_assist = 3; % 最大助力(Nm)
min_assist = 0.5; % 最小助力(Nm)
% 归一化处理
normalized_torque = abs(hand_torque) / 5; % 假设最大手力矩为5Nm
% 计算助力增益
if vehicle_speed <= low_speed
gain = 1;
elseif vehicle_speed >= high_speed
gain = 0;
else
gain = 1 - (vehicle_speed - low_speed) / (high_speed - low_speed);
end
% 计算最终助力
assist_torque = (min_assist + (max_assist - min_assist) * normalized_torque * gain) * sign(hand_torque);
end
Simulink实现:
- 使用
MATLAB Function模块导入上述代码; - 输入为方向盘扭矩(
hand_torque)和车速(vehicle_speed); - 输出为助力扭矩(
assist_torque)。
(2)PID控制算法
PID控制通过比例、积分、微分环节调整助力扭矩,代码如下(参考):
function [output] = EPS_PID(input, Kp, Ki, Kd, Ts)
persistent integral prev_error;
if isempty(integral)
integral = 0;
prev_error = 0;
end
error = input(1) - input(2); % 目标扭矩与实际差值
integral = integral + error*Ts;
derivative = (error - prev_error)/Ts;
output = Kp*error + Ki*integral + Kd*derivative;
prev_error = error;
end
Simulink实现:
- 使用
PID Controller模块(或MATLAB Function模块); - 输入为目标扭矩(
target_torque)和实际扭矩(actual_torque); - 输出为控制电压(
control_voltage)。
参考模型 电动助力转向的simulink模型 www.youwenfan.com/contentcnq/51156.html
三、模型参数设置
EPS系统Simulink模型的参数需根据实际车辆和EPS部件的特性设置,以下是典型参数(参考):
| 参数 | 符号 | 数值 | 单位 |
|---|---|---|---|
| 车辆质量 | m | 1500 | kg |
| 绕z轴转动惯量 | Iz | 2700 | kg·m² |
| 质心到前轴距离 | a | 1.2 | m |
| 质心到后轴距离 | b | 1.4 | m |
| 前轮侧偏刚度 | Cf | 150000 | N/rad |
| 后轮侧偏刚度 | Cr | 180000 | N/rad |
| 电机转动惯量 | Jm | 0.05 | kg·m² |
| 电机阻尼系数 | Bm | 0.1 | N·m·s/rad |
| 电机扭矩常数 | Kt | 0.5 | N·m/A |
| 电枢电阻 | Ra | 0.5 | Ω |
| 电感 | La | 0.01 | H |
| 反电动势常数 | Kb | 0.5 | V·s/rad |
| 减速比 | Ng | 50 | — |
| 转向柱扭转刚度 | Kstiffness | 500 | N·m/rad |
| 转向柱阻尼系数 | Bdamping | 10 | N·m·s/rad |
四、仿真测试与结果分析
1. 测试场景设计
- 低速转向:模拟停车场泊车场景,车速u=5km/h,方向盘扭矩为阶跃信号(1N·m);
- 高速转向:模拟高速公路变道场景,车速u=80km/h,方向盘扭矩为正弦信号(振幅2N·m,频率1Hz);
- 回正性能:模拟释放方向盘后的回正过程,初始角度为30°,车速u=60km/h。
2. 性能指标
- 转向轻便性:低速时方向盘扭矩(N·m);
- 高速稳定性:高速时横摆角速度(rad/s);
- 回正性能:回正时间(s)、超调量(%)。
3. 仿真结果示例
- 低速转向:逻辑门限值控制下,方向盘扭矩从1N·m降至0.5N·m(助力扭矩3N·m),转向轻便;
- 高速转向:PID控制下,横摆角速度波动小于0.1rad/s,高速稳定;
- 回正性能:回正时间为1.2s,超调量为8%,满足设计要求。
五、模型优化方向
- 非线性特性:添加转向柱摩擦(如Stribeck模型)、轮胎非线性(如Fiala模型),提高模型真实性;
- 鲁棒控制:采用模糊PID或模型预测控制(MPC),提升系统对参数变化和干扰的鲁棒性;
- 硬件在环(HIL):将Simulink模型与真实EPS控制器连接,进行实时测试。
六、总结
电动助力转向系统的Simulink模型需涵盖整车动力学、转向柱传动、EPS执行机构及控制系统四大模块,通过逻辑门限值或PID控制算法实现助力扭矩的精准调节。仿真结果验证了模型的有效性,可为EPS系统的设计、优化提供依据。
参考文献:
汽车领域EPS电动助力转向系统中SIMULINK模型与PID控制算法的构建及应用资源-CSDN文库
MATLAB/Simulink中电动助力转向(EPS)系统建模与PID控制算法实现资源-CSDN文库
电动助力转向系统的建模和仿真分析*
基于整车动力学的电动助力转向系统建模仿真
MATLAB/Simulink汽车电动助力转向模型EPS模型_转向系统simulink模型-CSDN博客
MATLAB_Simulink汽车电动助力转向模型EPS模型-CSDN博客

 浙公网安备 33010602011771号
浙公网安备 33010602011771号