
哈工大操作系统实验(三)进程运行轨迹的跟踪与绘制
实验目的:
·掌握 Linux 下的多进程编程技术;
·通过对进程运行轨迹的跟踪来形象化进程的概念;
·在进程运行轨迹跟踪的基础上进行相应的数据统计,从而能对进程调度算法进行实际的量化评价,更进一步加深对调度和调度算法的理解,获得能在实际操作系统上对调度算法进行实验数据对比的直接经验。
实验内容:
1、基于模板 process.c 编写多进程的样本程序,实现如下功能: + 所有子进程都并行运行,每个子进程的实际运行时间一般不超过 30 秒; + 父进程向标准输出打印所有子进程的 id,并在所有子进程都退出后才退出;
2、在 Linux0.11 上实现进程运行轨迹的跟踪。 + 基本任务是在内核中维护一个日志文件 /var/process.log,把从操作系统启动到系统关机过程中所有进程的运行轨迹都记录在这一 log 文件中。
3、在修改过的 0.11 上运行样本程序,通过分析 log 文件,统计该程序建立的所有进程的等待时间、完成时间(周转时间)和运行时间,然后计算平均等待时间,平均完成时间和吞吐量。可以自己编写统计程序,也可以使用 python 脚本程序—— stat_log.py(在 /home/teacher/ 目录下) ——进行统计。
4、修改 0.11 进程调度的时间片,然后再运行同样的样本程序,统计同样的时间数据,和原有的情况对比,体会不同时间片带来的差异
process.c程序:
#include <stdio.h>
#include <unistd.h>
#include <time.h>
#include <sys/times.h>
#include <stdlib.h>
#include <sys/wait.h>
#include <sys/types.h>
#include <errno.h>
#define HZ 100
void cpuio_bound(int last,int cpu_time,int io_time);
int main(int argc,char* arg[])
{
pid_t pid1;
pid_t pid2;
pid_t pid3;
pid1=fork();
if(pid1<0)
{
printf("fork1 error");
}
else if(pid1==0)
{
printf("fork 1\n");
cpuio_bound(5,3,2);
}
pid2=fork();
if(pid2<0)
{
printf("fork2 error");
}
else if(pid2==0)
{
printf("fork 2\n");
cpuio_bound(5,3,2);
}
pid3=fork();
if(pid3<0)
{
printf("fork3 error");
}
else if(pid3==0)
{
printf("fork 1\n");
cpuio_bound(5,3,2);
}
printf("This process's Pid is %d\n", getpid());
printf("Pid of child process 1 is %d\n", pid1);
printf("Pid of child process 2 is %d\n", pid2);
printf("Pid of child process 3 is %d\n", pid3);
wait(NULL);
return 0;
}
void cpuio_bound(int last,int cpu_time,int io_time)
{
struct tms start_time,current_time;
clock_t utime,stime;
int sleep_time;
while(last>0)
{
times(&start_time);
do
{
times(¤t_time);
utime = current_time.tms_utime-start_time.tms_utime;
stime=current_time.tms_stime-start_time.tms_stime;
}while(((utime_stime)/HZ)<cpu_time);
last-=cpu_time;
if(last<=0)
break;
sleep_time=0;
while(sleep_time<io_time)
{
sleep(1);
sleep_time++;
}
last-=sleep_time;
}
}
init/main.c修改成如下形式:

之后修改kernel/fork.c kernel/sched.c kernel/exit.c 三个文件,找到进程状态转换的点,并把它输出到log文件之中。
fork.c:
/*
* linux/kernel/fork.c
*
* (C) 1991 Linus Torvalds
*/
/*
* 'fork.c' contains the help-routines for the 'fork' system call
* (see also system_call.s), and some misc functions ('verify_area').
* Fork is rather simple, once you get the hang of it, but the memory
* management can be a bitch. See 'mm/mm.c': 'copy_page_tables()'
*/
#include <errno.h>
#include <linux/sched.h>
#include <linux/kernel.h>
#include <asm/segment.h>
#include <asm/system.h>
extern void write_verify(unsigned long address);
long last_pid=0;
void verify_area(void * addr,int size)
{
unsigned long start;
start = (unsigned long) addr;
size += start & 0xfff;
start &= 0xfffff000;
start += get_base(current->ldt[2]);
while (size>0) {
size -= 4096;
write_verify(start);
start += 4096;
}
}
int copy_mem(int nr,struct task_struct * p)
{
unsigned long old_data_base,new_data_base,data_limit;
unsigned long old_code_base,new_code_base,code_limit;
code_limit=get_limit(0x0f);
data_limit=get_limit(0x17);
old_code_base = get_base(current->ldt[1]);
old_data_base = get_base(current->ldt[2]);
if (old_data_base != old_code_base)
panic("We don't support separate I&D");
if (data_limit < code_limit)
panic("Bad data_limit");
new_data_base = new_code_base = nr * 0x4000000;
p->start_code = new_code_base;
set_base(p->ldt[1],new_code_base);
set_base(p->ldt[2],new_data_base);
if (copy_page_tables(old_data_base,new_data_base,data_limit)) {
printk("free_page_tables: from copy_mem\n");
free_page_tables(new_data_base,data_limit);
return -ENOMEM;
}
return 0;
}
/*
* Ok, this is the main fork-routine. It copies the system process
* information (task[nr]) and sets up the necessary registers. It
* also copies the data segment in it's entirety.
*/
int copy_process(int nr,long ebp,long edi,long esi,long gs,long none,
long ebx,long ecx,long edx,
long fs,long es,long ds,
long eip,long cs,long eflags,long esp,long ss)
{
struct task_struct *p;
int i;
struct file *f;
p = (struct task_struct *) get_free_page();
if (!p)
return -EAGAIN;
task[nr] = p;
*p = *current; /* NOTE! this doesn't copy the supervisor stack */
p->state = TASK_UNINTERRUPTIBLE;
p->pid = last_pid;
p->father = current->pid;
p->counter = p->priority;
p->signal = 0;
p->alarm = 0;
p->leader = 0; /* process leadership doesn't inherit */
p->utime = p->stime = 0;
p->cutime = p->cstime = 0;
p->start_time = jiffies;
fprintk(3,"%d\tN\t%d\n",p->pid,jiffies);
p->tss.back_link = 0;
p->tss.esp0 = PAGE_SIZE + (long) p;
p->tss.ss0 = 0x10;
p->tss.eip = eip;
p->tss.eflags = eflags;
p->tss.eax = 0;
p->tss.ecx = ecx;
p->tss.edx = edx;
p->tss.ebx = ebx;
p->tss.esp = esp;
p->tss.ebp = ebp;
p->tss.esi = esi;
p->tss.edi = edi;
p->tss.es = es & 0xffff;
p->tss.cs = cs & 0xffff;
p->tss.ss = ss & 0xffff;
p->tss.ds = ds & 0xffff;
p->tss.fs = fs & 0xffff;
p->tss.gs = gs & 0xffff;
p->tss.ldt = _LDT(nr);
p->tss.trace_bitmap = 0x80000000;
if (last_task_used_math == current)
__asm__("clts ; fnsave %0"::"m" (p->tss.i387));
if (copy_mem(nr,p)) {
task[nr] = NULL;
free_page((long) p);
return -EAGAIN;
}
for (i=0; i<NR_OPEN;i++)
if ((f=p->filp[i]))
f->f_count++;
if (current->pwd)
current->pwd->i_count++;
if (current->root)
current->root->i_count++;
if (current->executable)
current->executable->i_count++;
set_tss_desc(gdt+(nr<<1)+FIRST_TSS_ENTRY,&(p->tss));
set_ldt_desc(gdt+(nr<<1)+FIRST_LDT_ENTRY,&(p->ldt));
p->state = TASK_RUNNING; /* do this last, just in case */
return last_pid;
}
int find_empty_process(void)
{
int i;
repeat:
if ((++last_pid)<0) last_pid=1;
for(i=0 ; i<NR_TASKS ; i++)
if (task[i] && task[i]->pid == last_pid) goto repeat;
for(i=1 ; i<NR_TASKS ; i++)
if (!task[i])
return i;
return -EAGAIN;
}
exit.c
/*
* linux/kernel/exit.c
*
* (C) 1991 Linus Torvalds
*/
#include <errno.h>
#include <signal.h>
#include <sys/wait.h>
#include <linux/sched.h>
#include <linux/kernel.h>
#include <linux/tty.h>
#include <asm/segment.h>
int sys_pause(void);
int sys_close(int fd);
void release(struct task_struct * p)
{
int i;
if (!p)
return;
for (i=1 ; i<NR_TASKS ; i++)
if (task[i]==p) {
task[i]=NULL;
free_page((long)p);
schedule();
return;
}
panic("trying to release non-existent task");
}
static inline int send_sig(long sig,struct task_struct * p,int priv)
{
if (!p || sig<1 || sig>32)
return -EINVAL;
if (priv || (current->euid==p->euid) || suser())
p->signal |= (1<<(sig-1));
else
return -EPERM;
return 0;
}
static void kill_session(void)
{
struct task_struct **p = NR_TASKS + task;
while (--p > &FIRST_TASK) {
if (*p && (*p)->session == current->session)
(*p)->signal |= 1<<(SIGHUP-1);
}
}
/*
* XXX need to check permissions needed to send signals to process
* groups, etc. etc. kill() permissions semantics are tricky!
*/
int sys_kill(int pid,int sig)
{
struct task_struct **p = NR_TASKS + task;
int err, retval = 0;
if (!pid) while (--p > &FIRST_TASK) {
if (*p && (*p)->pgrp == current->pid)
if ((err=send_sig(sig,*p,1)))
retval = err;
} else if (pid>0) while (--p > &FIRST_TASK) {
if (*p && (*p)->pid == pid)
if ((err=send_sig(sig,*p,0)))
retval = err;
} else if (pid == -1) while (--p > &FIRST_TASK) {
if ((err = send_sig(sig,*p,0)))
retval = err;
} else while (--p > &FIRST_TASK)
if (*p && (*p)->pgrp == -pid)
if ((err = send_sig(sig,*p,0)))
retval = err;
return retval;
}
static void tell_father(int pid)
{
int i;
if (pid)
for (i=0;i<NR_TASKS;i++) {
if (!task[i])
continue;
if (task[i]->pid != pid)
continue;
task[i]->signal |= (1<<(SIGCHLD-1));
return;
}
/* if we don't find any fathers, we just release ourselves */
/* This is not really OK. Must change it to make father 1 */
printk("BAD BAD - no father found\n\r");
release(current);
}
int do_exit(long code)
{
int i;
free_page_tables(get_base(current->ldt[1]),get_limit(0x0f));
free_page_tables(get_base(current->ldt[2]),get_limit(0x17));
for (i=0 ; i<NR_TASKS ; i++)
if (task[i] && task[i]->father == current->pid) {
task[i]->father = 1;
if (task[i]->state == TASK_ZOMBIE)
/* assumption task[1] is always init */
(void) send_sig(SIGCHLD, task[1], 1);
}
for (i=0 ; i<NR_OPEN ; i++)
if (current->filp[i])
sys_close(i);
iput(current->pwd);
current->pwd=NULL;
iput(current->root);
current->root=NULL;
iput(current->executable);
current->executable=NULL;
if (current->leader && current->tty >= 0)
tty_table[current->tty].pgrp = 0;
if (last_task_used_math == current)
last_task_used_math = NULL;
if (current->leader)
kill_session();
current->state = TASK_ZOMBIE;
fprintk(3,"%d\tE\t%d\n",current->pid,jiffies);
current->exit_code = code;
tell_father(current->father);
schedule();
return (-1); /* just to suppress warnings */
}
int sys_exit(int error_code)
{
return do_exit((error_code&0xff)<<8);
}
int sys_waitpid(pid_t pid,unsigned long * stat_addr, int options)
{
int flag, code;
struct task_struct ** p;
verify_area(stat_addr,4);
repeat:
flag=0;
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p) {
if (!*p || *p == current)
continue;
if ((*p)->father != current->pid)
continue;
if (pid>0) {
if ((*p)->pid != pid)
continue;
} else if (!pid) {
if ((*p)->pgrp != current->pgrp)
continue;
} else if (pid != -1) {
if ((*p)->pgrp != -pid)
continue;
}
switch ((*p)->state) {
case TASK_STOPPED:
if (!(options & WUNTRACED))
continue;
put_fs_long(0x7f,stat_addr);
return (*p)->pid;
case TASK_ZOMBIE:
current->cutime += (*p)->utime;
current->cstime += (*p)->stime;
flag = (*p)->pid;
code = (*p)->exit_code;
release(*p);
put_fs_long(code,stat_addr);
return flag;
default:
flag=1;
continue;
}
}
if (flag) {
if (options & WNOHANG)
return 0;
current->state=TASK_INTERRUPTIBLE;
fprintk(3,"%d\tW\t%d\n",current->pid,jiffies);
schedule();
if (!(current->signal &= ~(1<<(SIGCHLD-1))))
goto repeat;
else
return -EINTR;
}
return -ECHILD;
}
sched.c
/*
* linux/kernel/sched.c
*
* (C) 1991 Linus Torvalds
*/
/*
* 'sched.c' is the main kernel file. It contains scheduling primitives
* (sleep_on, wakeup, schedule etc) as well as a number of simple system
* call functions (type getpid(), which just extracts a field from
* current-task
*/
#include <linux/sched.h>
#include <linux/kernel.h>
#include <linux/sys.h>
#include <linux/fdreg.h>
#include <asm/system.h>
#include <asm/io.h>
#include <asm/segment.h>
#include <signal.h>
#define _S(nr) (1<<((nr)-1))
#define _BLOCKABLE (~(_S(SIGKILL) | _S(SIGSTOP)))
void show_task(int nr,struct task_struct * p)
{
int i,j = 4096-sizeof(struct task_struct);
printk("%d: pid=%d, state=%d, ",nr,p->pid,p->state);
i=0;
while (i<j && !((char *)(p+1))[i])
i++;
printk("%d (of %d) chars free in kernel stack\n\r",i,j);
}
void show_stat(void)
{
int i;
for (i=0;i<NR_TASKS;i++)
if (task[i])
show_task(i,task[i]);
}
#define LATCH (1193180/HZ)
extern void mem_use(void);
extern int timer_interrupt(void);
extern int system_call(void);
union task_union {
struct task_struct task;
char stack[PAGE_SIZE];
};
static union task_union init_task = {INIT_TASK,};
long volatile jiffies=0;
long startup_time=0;
struct task_struct *current = &(init_task.task);
struct task_struct *last_task_used_math = NULL;
struct task_struct * task[NR_TASKS] = {&(init_task.task), };
long user_stack [ PAGE_SIZE>>2 ] ;
struct {
long * a;
short b;
} stack_start = { & user_stack [PAGE_SIZE>>2] , 0x10 };
/*
* 'math_state_restore()' saves the current math information in the
* old math state array, and gets the new ones from the current task
*/
void math_state_restore()
{
if (last_task_used_math == current)
return;
__asm__("fwait");
if (last_task_used_math) {
__asm__("fnsave %0"::"m" (last_task_used_math->tss.i387));
}
last_task_used_math=current;
if (current->used_math) {
__asm__("frstor %0"::"m" (current->tss.i387));
} else {
__asm__("fninit"::);
current->used_math=1;
}
}
/*
* 'schedule()' is the scheduler function. This is GOOD CODE! There
* probably won't be any reason to change this, as it should work well
* in all circumstances (ie gives IO-bound processes good response etc).
* The one thing you might take a look at is the signal-handler code here.
*
* NOTE!! Task 0 is the 'idle' task, which gets called when no other
* tasks can run. It can not be killed, and it cannot sleep. The 'state'
* information in task[0] is never used.
*/
void schedule(void)
{
int i,next,c;
struct task_struct ** p;
/* check alarm, wake up any interruptible tasks that have got a signal */
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p) {
if ((*p)->alarm && (*p)->alarm < jiffies) {
(*p)->signal |= (1<<(SIGALRM-1));
(*p)->alarm = 0;
}
if (((*p)->signal & ~(_BLOCKABLE & (*p)->blocked)) &&
(*p)->state==TASK_INTERRUPTIBLE){
(*p)->state=TASK_RUNNING;
fprintk(3,"%d\tJ\t%d\n",(*p)->pid,jiffies);
}
}
/* this is the scheduler proper: */
while (1) {
c = -1;
next = 0;
i = NR_TASKS;
p = &task[NR_TASKS];
while (--i) {
if (!*--p)
continue;
if ((*p)->state == TASK_RUNNING && (*p)->counter > c)
c = (*p)->counter, next = i;
}
if (c) break;
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p)
(*p)->counter = ((*p)->counter >> 1) +
(*p)->priority;
}
/*编号为next的进程 运行*/
if(current->pid != task[next] ->pid)
{
/*时间片到时程序 => 就绪*/
if(current->state == TASK_RUNNING)
fprintk(3,"%d\tJ\t%d\n",current->pid,jiffies);
fprintk(3,"%d\tR\t%d\n",task[next]->pid,jiffies);
}
switch_to(next);
}
int sys_pause(void)
{
current->state = TASK_INTERRUPTIBLE;
if(current->pid != 0)
fprintk(3,"%d\tW\t%d\n",current->pid,jiffies);
schedule();
return 0;
}
void sleep_on(struct task_struct **p)
{
struct task_struct *tmp;
if (!p)
return;
if (current == &(init_task.task))
panic("task[0] trying to sleep");
tmp = *p;
*p = current;
current->state = TASK_UNINTERRUPTIBLE;
fprintk(3,"%d\tW\t%d\n",current->pid,jiffies);
schedule();
if (tmp){
tmp->state=0;
fprintk(3,"%d\tJ\t%d\n",tmp->pid,jiffies);
}
}
void interruptible_sleep_on(struct task_struct **p)
{
struct task_struct *tmp;
if (!p)
return;
if (current == &(init_task.task))
panic("task[0] trying to sleep");
tmp=*p;
*p=current;
repeat: current->state = TASK_INTERRUPTIBLE;
fprintk(3,"%d\tW\t%d\n",current->pid,jiffies);
schedule();
if (*p && *p != current) {
(**p).state=0;
fprintk(3,"%d\tJ\t%d\n",(*p)->pid,jiffies);
goto repeat;
}
*p=NULL;
if (tmp){
tmp->state=0;
fprintk(3,"%d\tJ\t%d\n",tmp->pid,jiffies);
}
}
void wake_up(struct task_struct **p)
{
if (p && *p) {
(**p).state=0;
fprintk(3,"%d\tJ\t%d\n",(*p)->pid,jiffies);
*p=NULL;
}
}
/*
* OK, here are some floppy things that shouldn't be in the kernel
* proper. They are here because the floppy needs a timer, and this
* was the easiest way of doing it.
*/
static struct task_struct * wait_motor[4] = {NULL,NULL,NULL,NULL};
static int mon_timer[4]={0,0,0,0};
static int moff_timer[4]={0,0,0,0};
unsigned char current_DOR = 0x0C;
int ticks_to_floppy_on(unsigned int nr)
{
extern unsigned char selected;
unsigned char mask = 0x10 << nr;
if (nr>3)
panic("floppy_on: nr>3");
moff_timer[nr]=10000; /* 100 s = very big :-) */
cli(); /* use floppy_off to turn it off */
mask |= current_DOR;
if (!selected) {
mask &= 0xFC;
mask |= nr;
}
if (mask != current_DOR) {
outb(mask,FD_DOR);
if ((mask ^ current_DOR) & 0xf0)
mon_timer[nr] = HZ/2;
else if (mon_timer[nr] < 2)
mon_timer[nr] = 2;
current_DOR = mask;
}
sti();
return mon_timer[nr];
}
void floppy_on(unsigned int nr)
{
cli();
while (ticks_to_floppy_on(nr))
sleep_on(nr+wait_motor);
sti();
}
void floppy_off(unsigned int nr)
{
moff_timer[nr]=3*HZ;
}
void do_floppy_timer(void)
{
int i;
unsigned char mask = 0x10;
for (i=0 ; i<4 ; i++,mask <<= 1) {
if (!(mask & current_DOR))
continue;
if (mon_timer[i]) {
if (!--mon_timer[i])
wake_up(i+wait_motor);
} else if (!moff_timer[i]) {
current_DOR &= ~mask;
outb(current_DOR,FD_DOR);
} else
moff_timer[i]--;
}
}
#define TIME_REQUESTS 64
static struct timer_list {
long jiffies;
void (*fn)();
struct timer_list * next;
} timer_list[TIME_REQUESTS], * next_timer = NULL;
void add_timer(long jiffies, void (*fn)(void))
{
struct timer_list * p;
if (!fn)
return;
cli();
if (jiffies <= 0)
(fn)();
else {
for (p = timer_list ; p < timer_list + TIME_REQUESTS ; p++)
if (!p->fn)
break;
if (p >= timer_list + TIME_REQUESTS)
panic("No more time requests free");
p->fn = fn;
p->jiffies = jiffies;
p->next = next_timer;
next_timer = p;
while (p->next && p->next->jiffies < p->jiffies) {
p->jiffies -= p->next->jiffies;
fn = p->fn;
p->fn = p->next->fn;
p->next->fn = fn;
jiffies = p->jiffies;
p->jiffies = p->next->jiffies;
p->next->jiffies = jiffies;
p = p->next;
}
}
sti();
}
void do_timer(long cpl)
{
extern int beepcount;
extern void sysbeepstop(void);
if (beepcount)
if (!--beepcount)
sysbeepstop();
if (cpl)
current->utime++;
else
current->stime++;
if (next_timer) {
next_timer->jiffies--;
while (next_timer && next_timer->jiffies <= 0) {
void (*fn)(void);
fn = next_timer->fn;
next_timer->fn = NULL;
next_timer = next_timer->next;
(fn)();
}
}
if (current_DOR & 0xf0)
do_floppy_timer();
if ((--current->counter)>0) return;
current->counter=0;
if (!cpl) return;
schedule();
}
int sys_alarm(long seconds)
{
int old = current->alarm;
if (old)
old = (old - jiffies) / HZ;
current->alarm = (seconds>0)?(jiffies+HZ*seconds):0;
return (old);
}
int sys_getpid(void)
{
return current->pid;
}
int sys_getppid(void)
{
return current->father;
}
int sys_getuid(void)
{
return current->uid;
}
int sys_geteuid(void)
{
return current->euid;
}
int sys_getgid(void)
{
return current->gid;
}
int sys_getegid(void)
{
return current->egid;
}
int sys_nice(long increment)
{
if (current->priority-increment>0)
current->priority -= increment;
return 0;
}
void sched_init(void)
{
int i;
struct desc_struct * p;
if (sizeof(struct sigaction) != 16)
panic("Struct sigaction MUST be 16 bytes");
set_tss_desc(gdt+FIRST_TSS_ENTRY,&(init_task.task.tss));
set_ldt_desc(gdt+FIRST_LDT_ENTRY,&(init_task.task.ldt));
p = gdt+2+FIRST_TSS_ENTRY;
for(i=1;i<NR_TASKS;i++) {
task[i] = NULL;
p->a=p->b=0;
p++;
p->a=p->b=0;
p++;
}
/* Clear NT, so that we won't have troubles with that later on */
__asm__("pushfl ; andl $0xffffbfff,(%esp) ; popfl");
ltr(0);
lldt(0);
outb_p(0x36,0x43); /* binary, mode 3, LSB/MSB, ch 0 */
outb_p(LATCH & 0xff , 0x40); /* LSB */
outb(LATCH >> 8 , 0x40); /* MSB */
set_intr_gate(0x20,&timer_interrupt);
outb(inb_p(0x21)&~0x01,0x21);
set_system_gate(0x80,&system_call);
}
修改kernel/printk.c文件,添加打印功能
/*
* linux/kernel/printk.c
*
* (C) 1991 Linus Torvalds
*/
/*
* When in kernel-mode, we cannot use printf, as fs is liable to
* point to 'interesting' things. Make a printf with fs-saving, and
* all is well.
*/
#include <stdarg.h>
#include <stddef.h>
#include "linux/sched.h"
#include "sys/stat.h"
#include <linux/kernel.h>
static char buf[1024];
static char logbuf[1024];
extern int vsprintf(char * buf, const char * fmt, va_list args);
int printk(const char *fmt, ...)
{
va_list args;
int i;
va_start(args, fmt);
i=vsprintf(buf,fmt,args);
va_end(args);
__asm__("push %%fs\n\t"
"push %%ds\n\t"
"pop %%fs\n\t"
"pushl %0\n\t"
"pushl $buf\n\t"
"pushl $0\n\t"
"call tty_write\n\t"
"addl $8,%%esp\n\t"
"popl %0\n\t"
"pop %%fs"
::"r" (i):"ax","cx","dx");
return i;
}
int fprintk(int fd, const char *fmt, ...)
{
va_list args;
int count;
struct file * file;
struct m_inode * inode;
va_start(args, fmt);
count=vsprintf(logbuf, fmt, args);
va_end(args);
/* 如果输出到stdout或stderr,直接调用sys_write即可 */
if (fd < 3)
{
__asm__("push %%fs\n\t"
"push %%ds\n\t"
"pop %%fs\n\t"
"pushl %0\n\t"
/* 注意对于Windows环境来说,是_logbuf,下同 */
"pushl $logbuf\n\t"
"pushl %1\n\t"
/* 注意对于Windows环境来说,是_sys_write,下同 */
"call sys_write\n\t"
"addl $8,%%esp\n\t"
"popl %0\n\t"
"pop %%fs"
::"r" (count),"r" (fd):"ax","cx","dx");
}
else
/* 假定>=3的描述符都与文件关联。事实上,还存在很多其它情况,这里并没有考虑。*/
{
/* 从进程0的文件描述符表中得到文件句柄 */
if (!(file=task[0]->filp[fd]))
return 0;
inode=file->f_inode;
__asm__("push %%fs\n\t"
"push %%ds\n\t"
"pop %%fs\n\t"
"pushl %0\n\t"
"pushl $logbuf\n\t"
"pushl %1\n\t"
"pushl %2\n\t"
"call file_write\n\t"
"addl $12,%%esp\n\t"
"popl %0\n\t"
"pop %%fs"
::"r" (count),"r" (file),"r" (inode):"ax","cx","dx");
}
return count;
}
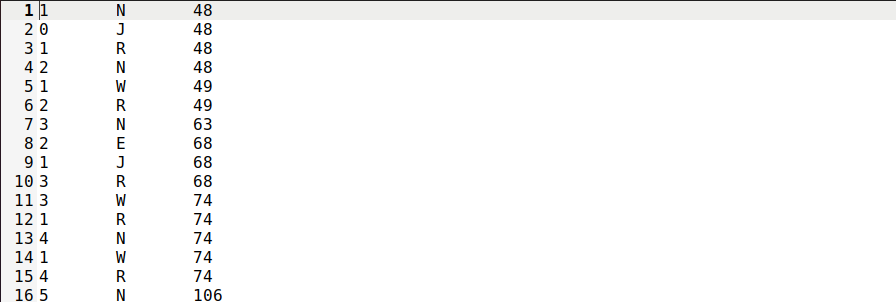
process.log:
注意实验中给出的stat_log.py文件是基于python2版本的,如果自己的系统是python3环境,需要对文件进行处理:
利用python3自带的2to3.py脚本(在/Tools/script/文件夹下),自动将stat_log.py转为python3文件,执行语句:python 2to3.py -w 自己的路径/stat_log.py
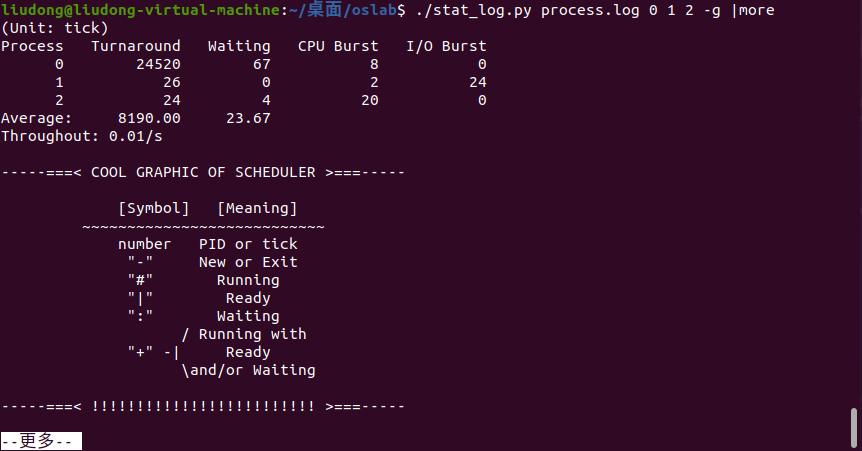
stat_log.py运行结果:
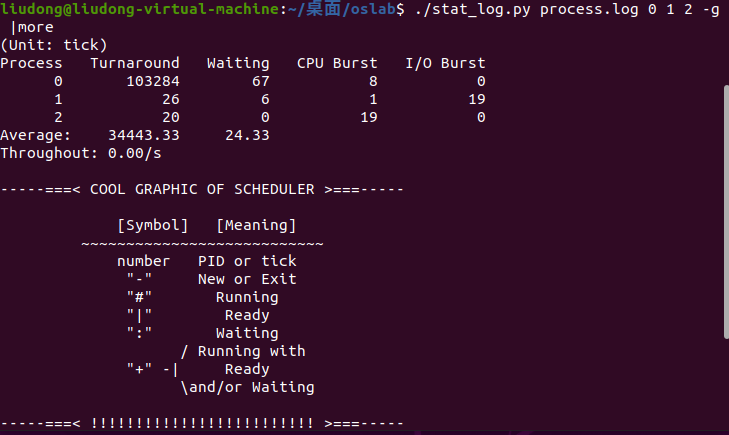
修改时间片之后:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号