
计算机视觉--图像到图像的映射
一、原理
单应性变换:
是将平面内的一个点映射到另一个平面内的二维投影变换,单应性变换矩阵是一个3*3的矩阵,具有8个自由度,第三行第三列,也就是最后一个值为1。单应性矩阵可以由两幅图像中对应点计算出来。
公式推导可以参考:https://blog.csdn.net/limmmy/article/details/88662042
仿射变换:
一种二维坐标到二维坐标之间的线性变换(相同平面),它保持了二维图形的“平直性”(直线经过变换之后依然是直线)和“平行性”(二维图形之间的相对位置关系保持不变,平行线依然是平行线,且直线上点的位置顺序不变),但是角度会改变。任意的仿射变换都能表示为乘以一个矩阵(线性变换),再加上一个向量 (平移) 的形式。单应性变换有8个自由度,仿射有6个自由度。
二、homography.py文件的内容
import numpy as np from numpy import * from matplotlib.pyplot import * from scipy import ndimage from PIL import Image def normallize(points): """在齐次坐标意义下,对点集进行归一化,是最后一行为1""" for row in points: row /= points[-1] return points def make_homog(points): """将点集(dim×n的数组)转换为齐次坐标表示""" return np.vstack((points,np.ones((1, points.shape[1])))) def H_from_points(fp, tp): """使用线性DLT方法,计算单应性矩阵H,使fp映射到tp。点自动进行归一化""" if fp.shape != tp.shape: raise RuntimeError('number of points do not match') # 对点进行归一化(对数值计算很重要) # --- 映射起始点 --- m = np.mean(fp[:2], axis=1) maxstd = max(np.std(fp[:2], axis=1)) + 1e-9 C1 = np.diag([1/maxstd, 1/maxstd, 1]) C1[0][2] = -m[0]/maxstd C1[1][2] = -m[1]/maxstd fp = np.dot(C1,fp) # --- 映射对应点 --- m = np.mean(tp[:2], axis=1) maxstd = max(np.std(tp[:2], axis=1)) + 1e-9 C2 = np.diag([1 / maxstd, 1 / maxstd, 1]) C2[0][2] = -m[0] / maxstd C2[1][2] = -m[1] / maxstd tp = np.dot(C2, tp) # 创建用于线性方法的矩阵,对于每个对应对,在矩阵中会出现两行数值 nbr_correspondences = fp.shape[1] A = np.zeros((2 * nbr_correspondences, 9)) for i in range(nbr_correspondences): A[2*i] = [-fp[0][i], -fp[1][i],-1,0,0,0, tp[0][i]*fp[0][i],tp[0][i]*fp[1][i],tp[0][i]] A[2*i+1] = [0,0,0,-fp[0][i],-fp[1][i],-1, tp[1][i]*fp[0][i],tp[1][i]*fp[1][i],tp[1][i]] U,S,V = np.linalg.svd(A) H = V[8].reshape((3,3)) #反归一化 H = np.dot(np.linalg.inv(C2),np.dot(H,C1)) #归一化,然后返回 return H / H[2,2] def Haffine_from_points(fp, tp): """计算H仿射变换,使得tp是fp经过仿射变换H得到的""" if fp.shape != tp.shape: raise RuntimeError('number of points do not match') # 对点进行归一化(对数值计算很重要) # --- 映射起始点 --- m = np.mean(fp[:2], axis=1) maxstd = max(np.std(fp[:2], axis=1)) + 1e-9 C1 = np.diag([1/maxstd, 1/maxstd, 1]) C1[0][2] = -m[0]/maxstd C1[1][2] = -m[1]/maxstd fp_cond = np.dot(C1,fp) # --- 映射对应点 --- m = np.mean(tp[:2], axis=1) C2 = C1.copy() # 两个点集,必须都进行相同的缩放 C2[0][2] = -m[0]/maxstd C2[1][2] = -m[1]/maxstd tp_cond = np.dot(C2,tp) # 因为归一化后点的均值为0,所以平移量为0 A = np.concatenate((fp_cond[:2],tp_cond[:2]), axis=0) U,S,V = np.linalg.svd(A.T) # 如Hartley和Zisserman著的Multiplr View Geometry In Computer,Scond Edition所示, # 创建矩阵B和C tmp = V[:2].T B = tmp[:2] C = tmp[2:4] tmp2 = np.concatenate((np.dot(C,np.linalg.pinv(B)),np.zeros((2,1))), axis=1) H = np.vstack((tmp2,[0,0,1])) # 反归一化 H = np.dot(np.linalg.inv(C2),np.dot(H,C1)) return H / H[2,2] def image_in_image(im1, im2, tp): """使用仿射变换将im1放置在im2上,使im1图像的角和tp尽可能的靠近 tp是齐次表示的,并且是按照从左上角逆时针计算的""" # 扭曲的点 m,n = im1.shape[:2] fp = array([[0,m,m,0],[0,0,n,n],[1,1,1,1]]) # 计算仿射变换,并且将其应用于图像im1中 H = Haffine_from_points(tp,fp) im1_t = ndimage.affine_transform(im1,H[:2,:2], (H[0,2],H[1,2]),im2.shape[:2]) alpha = (im1_t > 0) return (1-alpha)*im2 + alpha*im1_t
三、图像扭曲
对图像块应用仿射变换,我们将其称为图像扭曲(或者仿射扭曲)。该操作不仅经常在计算机图形学中,而且经常出现在计算机视觉算法总。扭曲的操作可以使用SciPy工具包中的ndimage包来简单完成。实验代码实现如下:
im = array(Image.open('jf3.jpg').convert('L')) H = array([[1.4,0.05,-100],[0.05,1.5,-100],[0,0,1]]) im2 = ndimage.affine_transform(im, H[:2,:2],(H[0,2],H[1,2])) gray() subplot(121) imshow(im) axis('off') subplot(122) imshow(im2) axis('off') show()
运行结果:
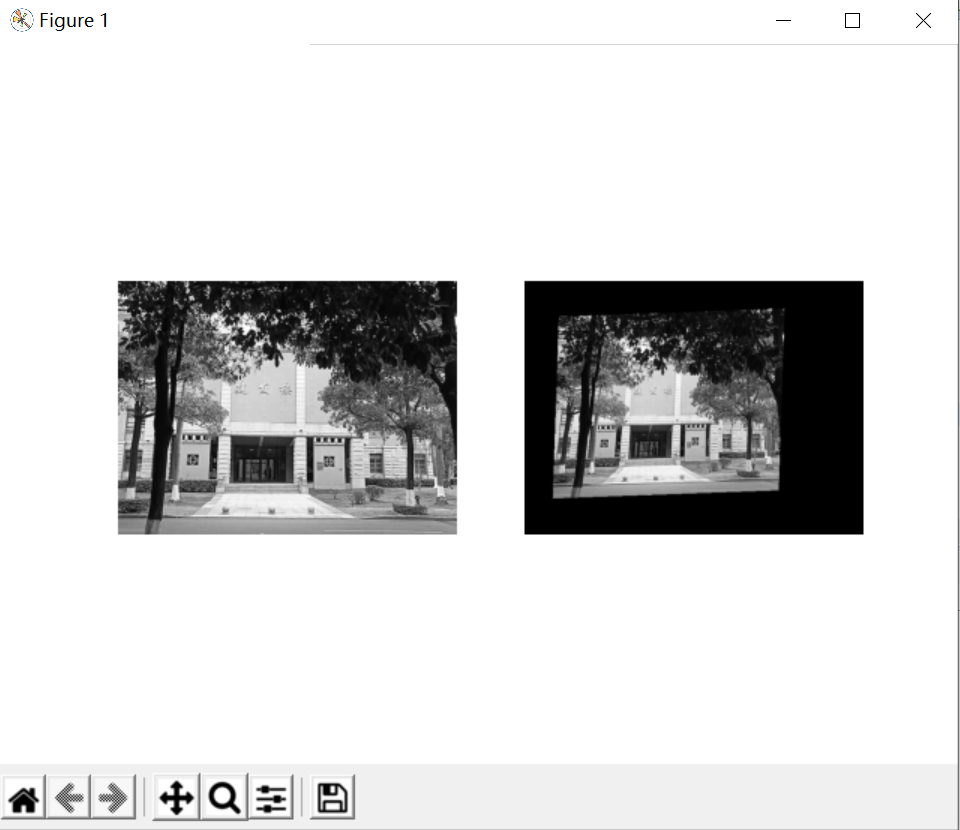
作图为拍摄的建发楼原图,右图是经过仿射变换得到的图片,没有映射到的像素点填充为0,为黑色,可以看见经过仿射变换后图片的角度发生了变化。
四、图像中的图像
仿射扭曲的一个简单例子是,将图像或者图像的一部分放置在另一幅图像中,是的他们能够和指定的区域或者标记物对齐。代码实现如下:
im1 = array(Image.open('dy-ja1.jpg').convert('L')) im2 = array(Image.open('dy-ja2.jpg').convert('L')) gray() subplot(131) imshow(im1) axis('equal') axis('off') subplot(132) imshow(im2) axis('equal') axis('off') # tp是映射目标位置 tp = array([[144, 272, 266, 141], [216, 216, 272, 269], [1, 1, 1, 1]]) im3 = image_in_image(im1, im2, tp) subplot(133) imshow(im3) axis('equal') axis('off') show()
运行结果:

im1(第一张图)是道远楼的图片,im2(第二张图)是建安楼,这段代码是将im1扭曲映射到im2指定的位置中,以替换楼房名称,想象中是无缝连接,事实是有色差,获取tp目标坐标是先显示im2图片,然后鼠标放至目标位置,从右下角取得xy坐标值

 浙公网安备 33010602011771号
浙公网安备 33010602011771号