foundationpose 部署到jetson(1)
将FoundationPose 部署到jetson上 (1)
这个最终实现的是jetson不需要外接其他的显示器,键盘实现本地显示图片,直接通过Windows远程连接,这个对于后续开发比较关键。
1. 环境
这里使用的是vscode+ssh+vcxsrv 进行远程桌面连接并且能在本地显示GUI界面
我的环境如下:
- PC端:Windows11
- vscode
- vcxsrv
- jetson Orin NX (Ubuntu22.04)
- MobaXterm
2. ssh连接jetson
2.1 获取jetson的IP
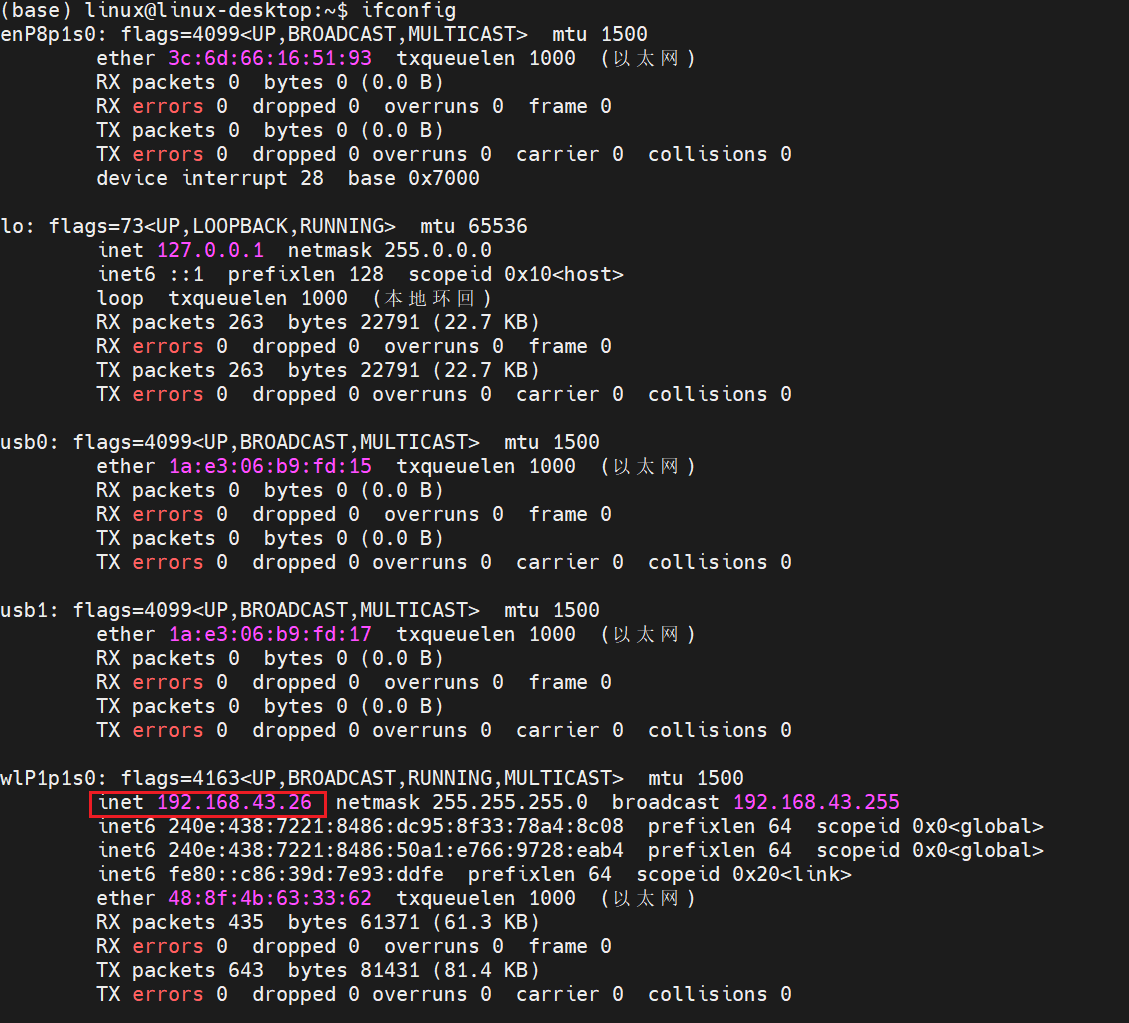
首先使用jetson连接网络,然后在jetson终端输入:
ifconfig
获取IP(这里还是使用屏幕和键盘,由于我之前已经设置好了这里就使用的MobaXterm),我使用的是WiFi所以得到下面的:
2.2 通过MobaXterm或者vscode来连接jetson
- 打开MobaXterm,然后选择Session
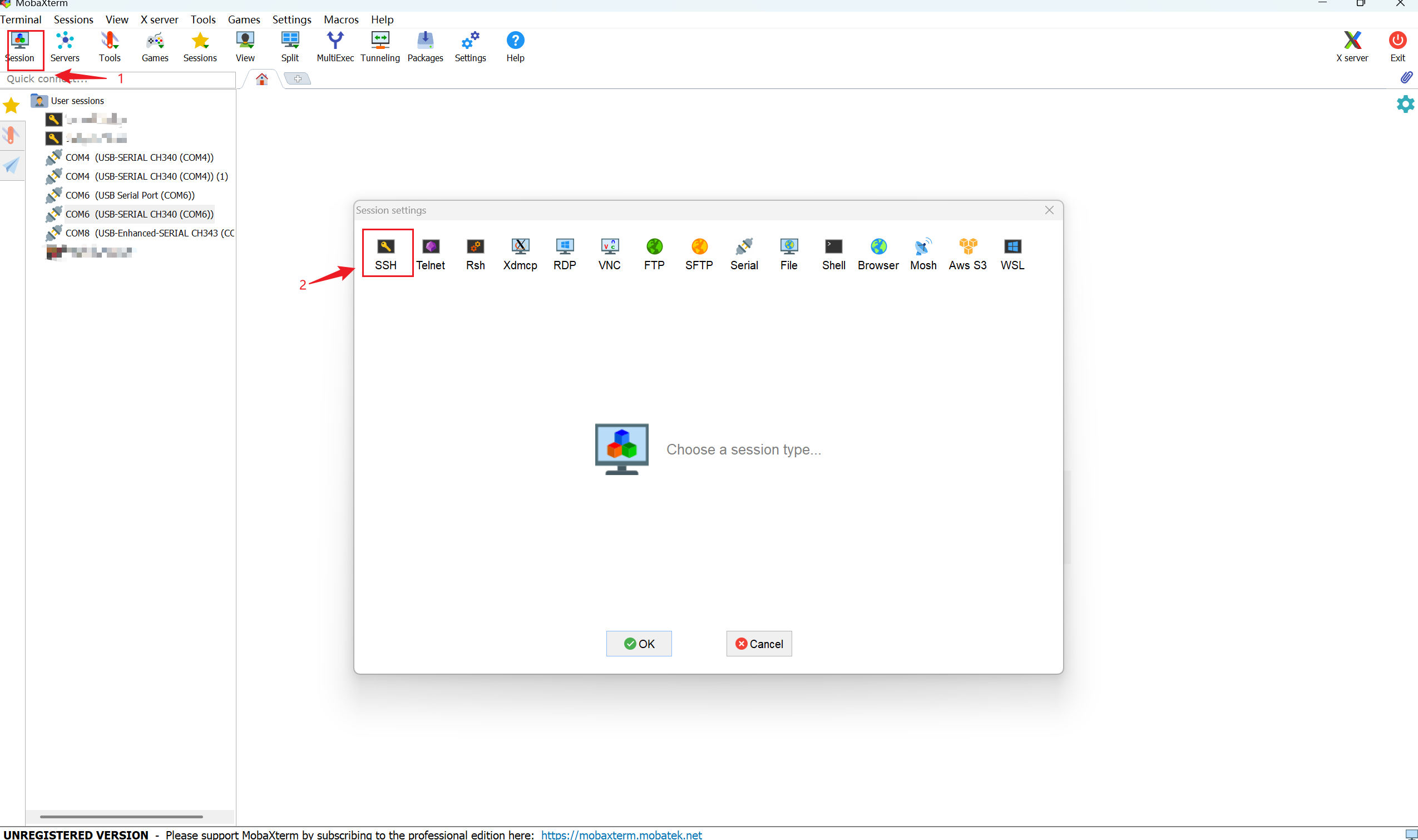
2. 再选择SSH,这里选择X11-Forwarding,这样如果jetson安装了X11,就能显示图片(这个后续配置,先选上)
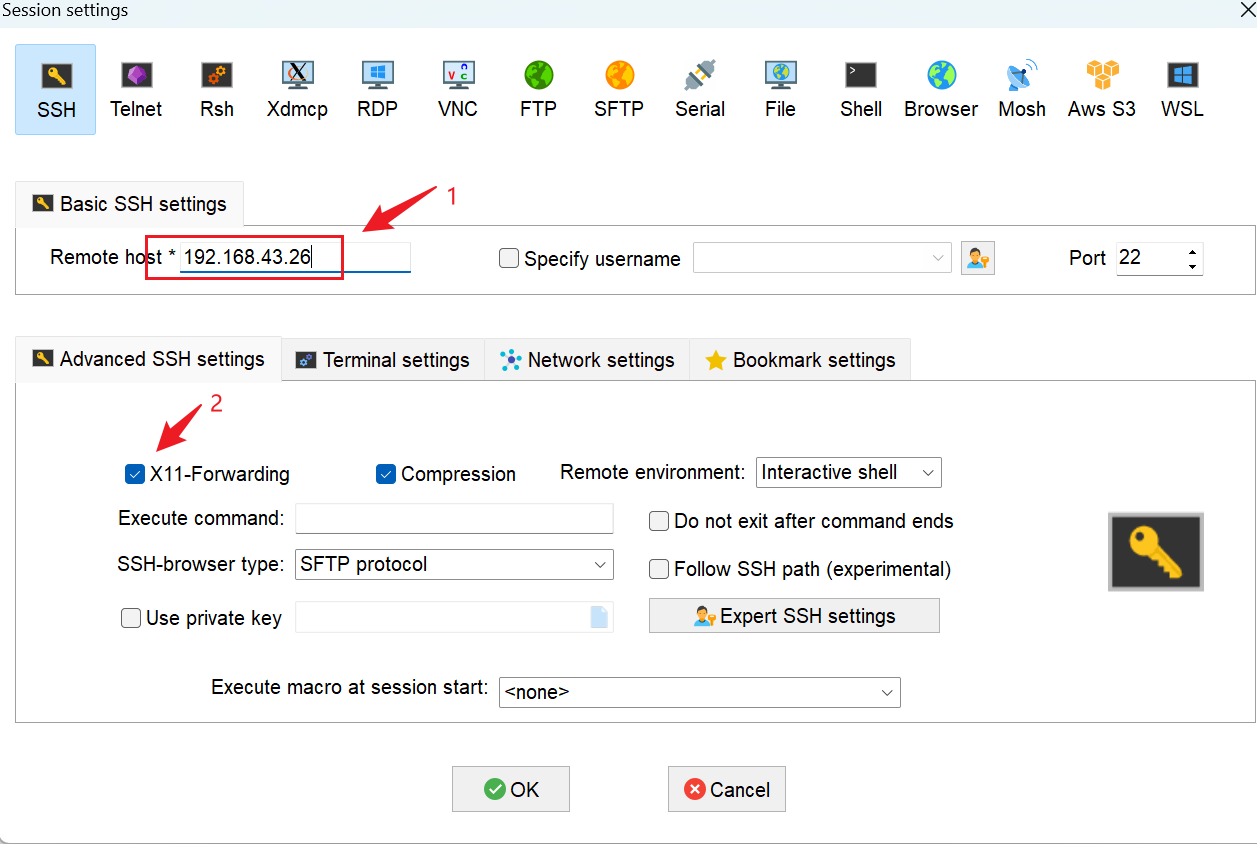
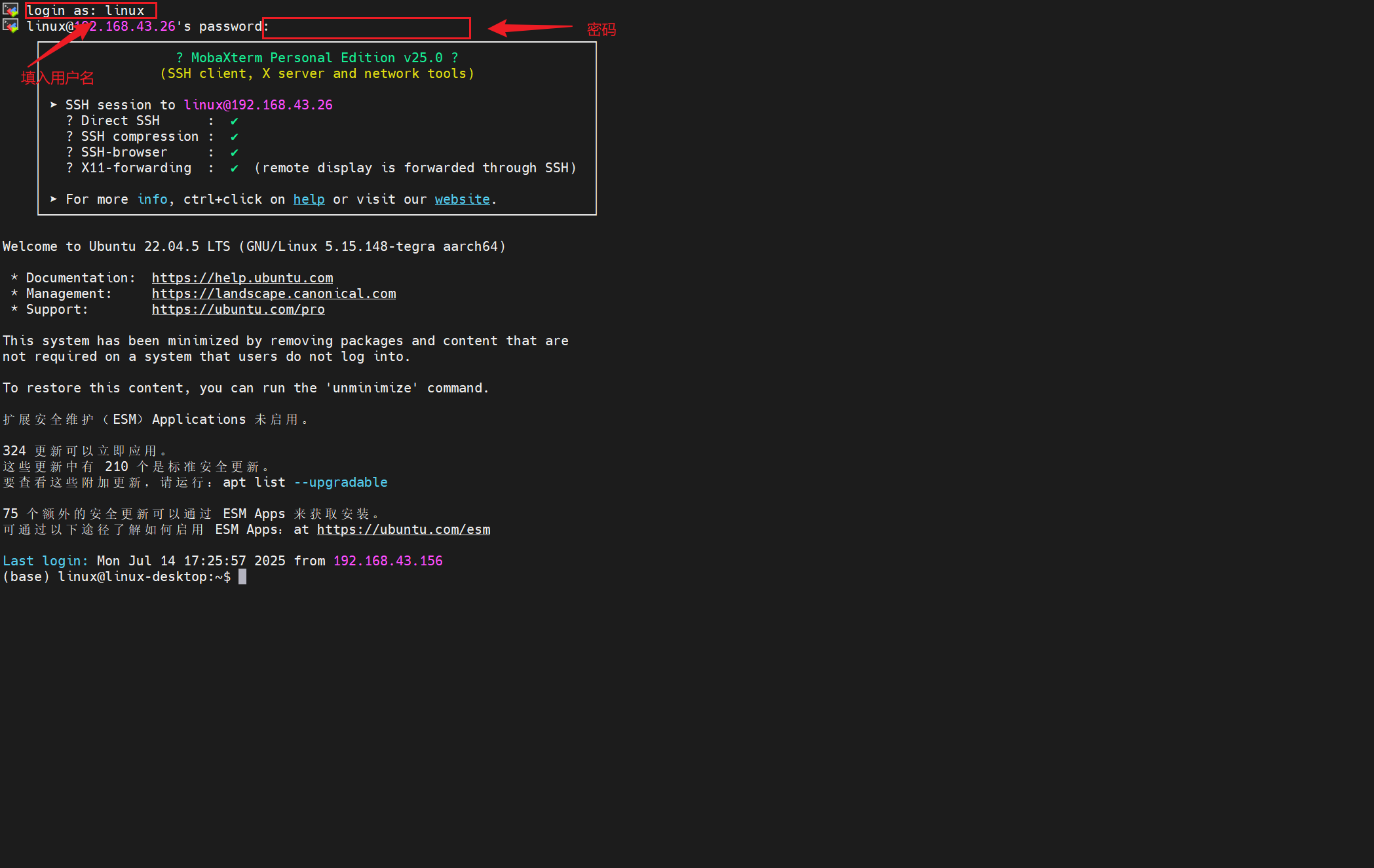
- 点击OK之后,填入自己设置的Linux用户名和密码
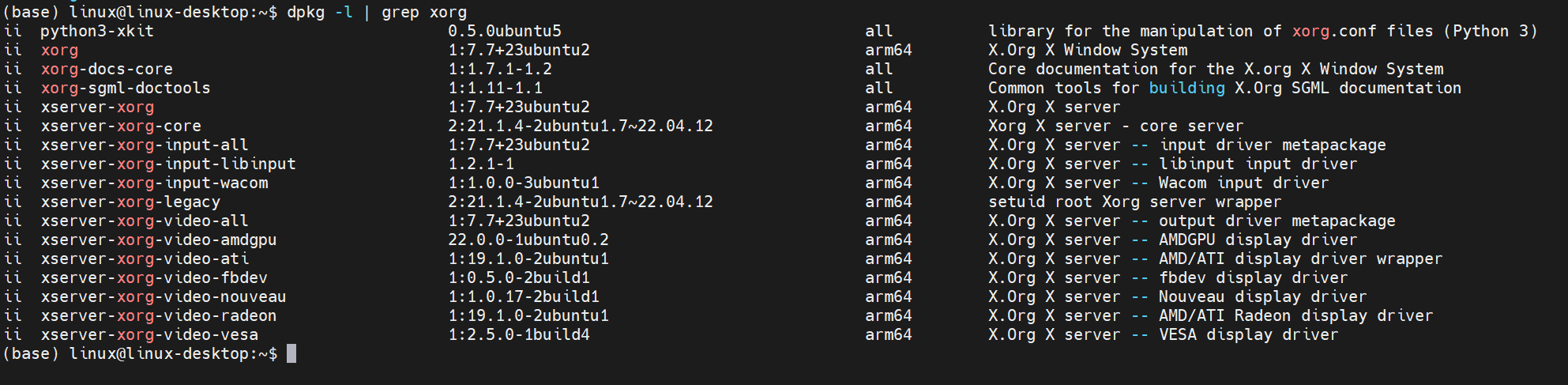
- 查看是否安装了X11
通过以下命令
dpkg -l | grep xorg
如果安装了可以看到X11的信息
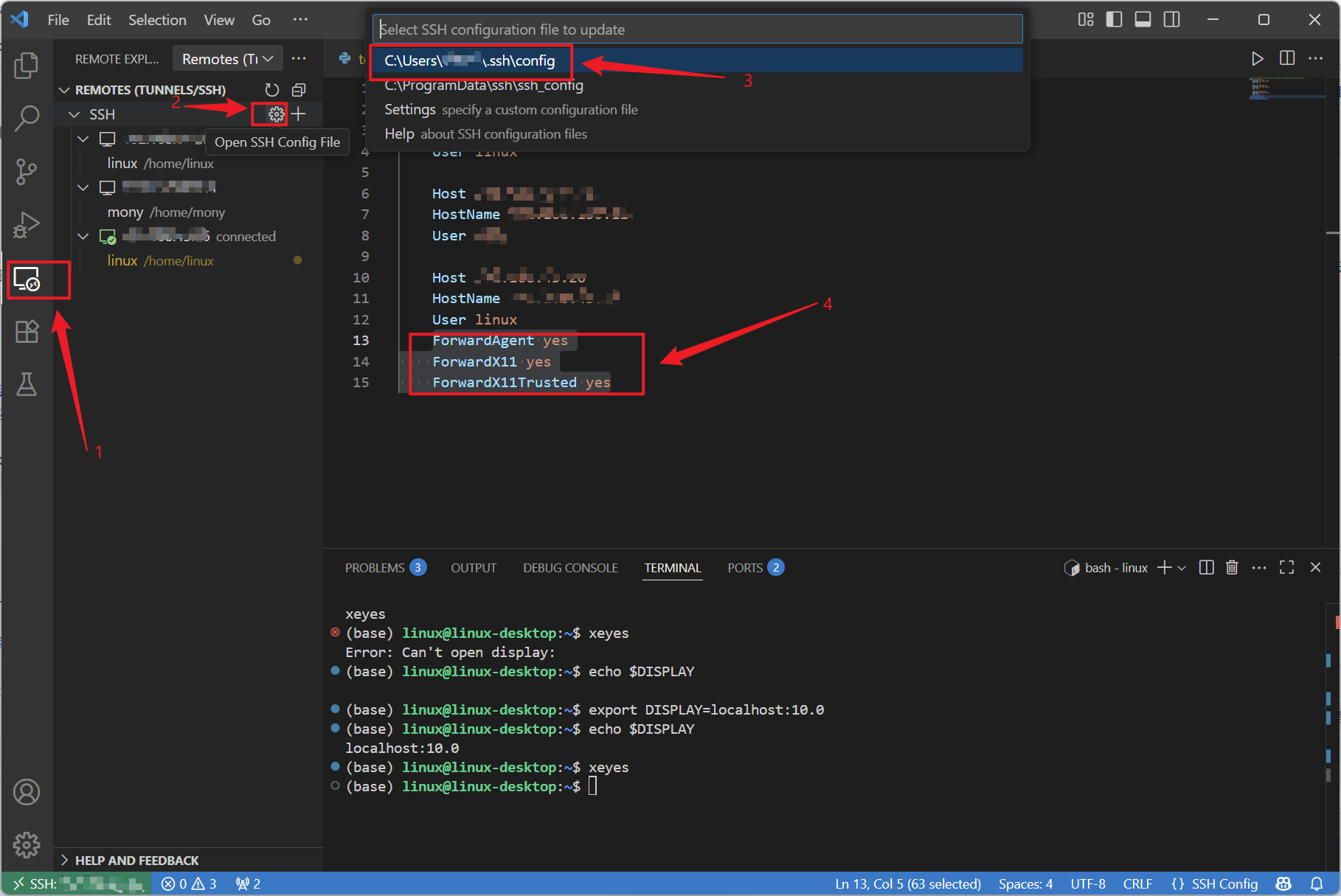
2.3 通过vscode来连接
具体看这个VS Code 远程连接 SSH 服务器
配置 VS Code 的 Remote-SSH 需要用到的 .ssh\config 文件
具体配置如下:
Host 主机名
HostName 域名或IP
User 用户名
Port SSH的端口
ForwardAgent yes
ForwardX11 yes
ForwardX11Trusted yes
3. 安装vcxsrv
-
下载vcxsrv
下载链接 -
下载完之后直接安装就行
安装后可以看到:
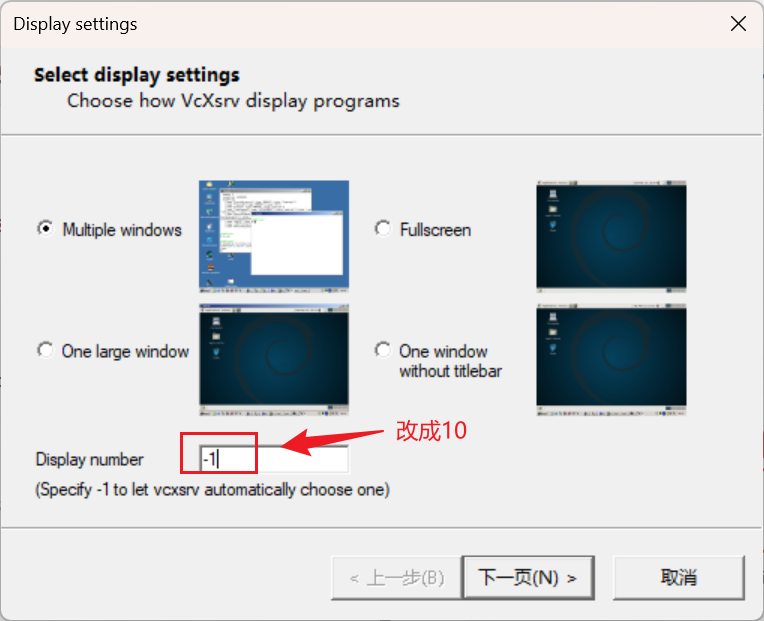
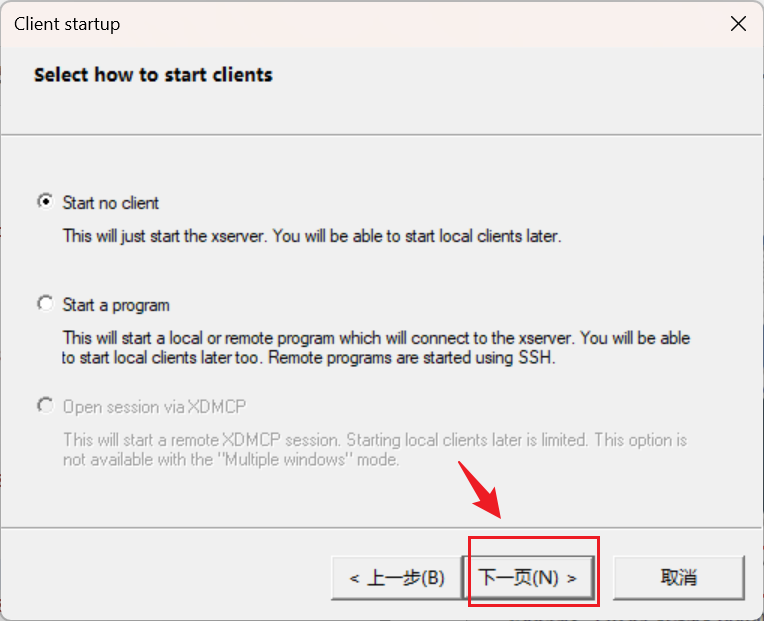
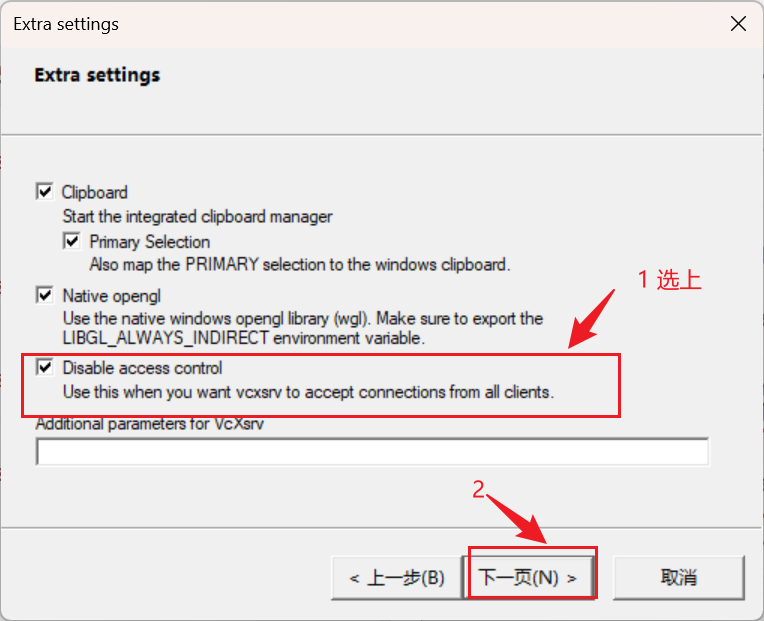
- 点击打开,按照下面步骤即可
4. 验证
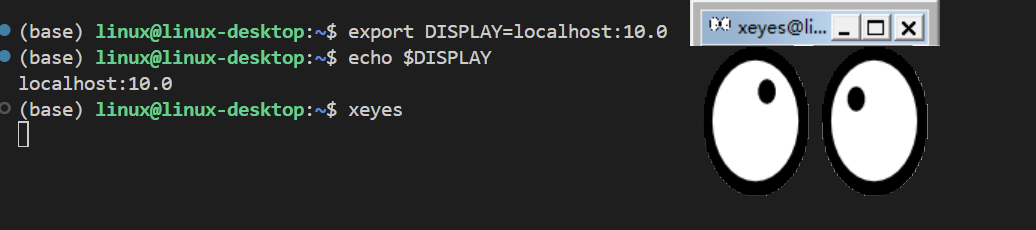
打开MobaXterm终端输入xeyes,可以看到下面的:
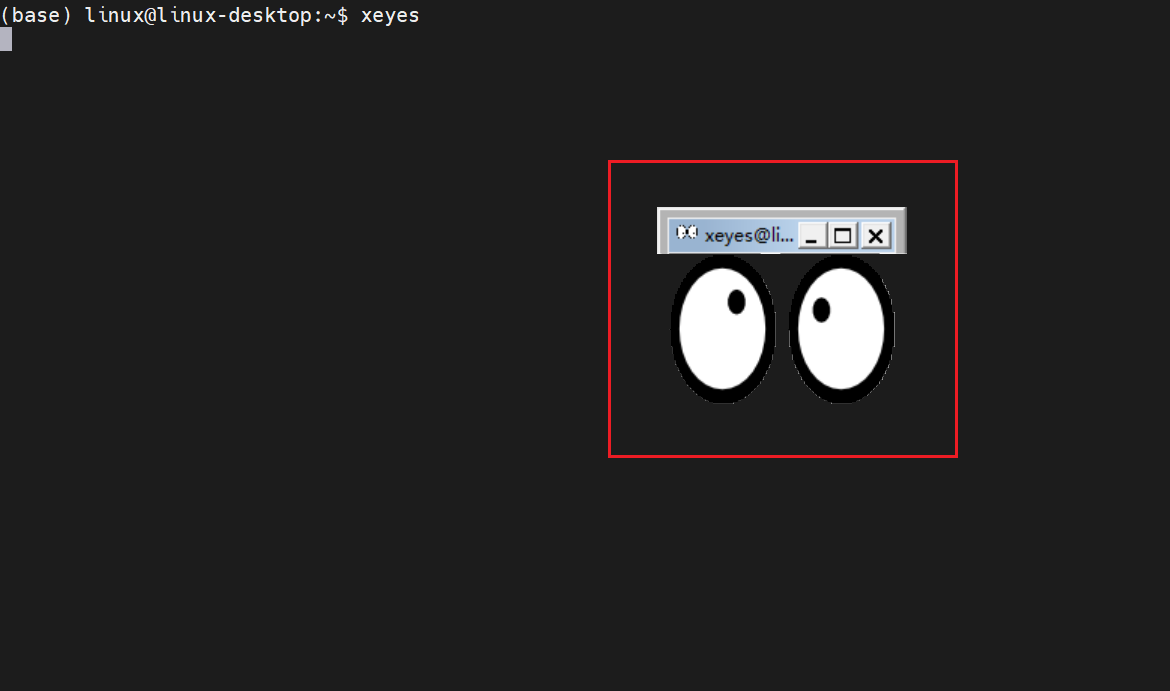
看到上面的结果说明,目前已经可以使用GUI了,显示摄像头采集图片之类的。
注意: 如果显示无法打开显示,例如在vscode中

先查看是否有显示的,命令如下:
echo $DISPLAY

如果显示的是空,则需要输入以下命令:
export DISPLAY=localhost:10.0
再重新输入查看是否有

最后测试看是否能运行:
注: 我自己在使用的时候发现必须同时开启MobaXterm,vscode才能正常的使用GUI,具体原因还需要再看看。。。
根据需要,可以设置静态IP
ubuntu20.04 的 jetson设备命令行设置静态ip
这样后续就不需要显示器和键盘直接在Windows上面操作。
5. 下一步计划
在jetson上安装cuda以及conda,搭建环境来运行FoundationPose。
6. 参考
[1] VSCode『SSH』连接服务器『GUI界面』传输
[2] ubuntu20.04 的 jetson设备命令行设置静态ip

 浙公网安备 33010602011771号
浙公网安备 33010602011771号