【Notes_3】现代图形学入门——基础变换、MVP变换模型
跟着闫令琪老师的课程学习,总结自己学习到的知识点
基础变换(二维)
三维变化与二维变换矩阵类似
齐次坐标下的基础变换
Scale:
Rotation:
Translation:
组合变换(Compositon Transform)
矩阵变换把先变化的矩阵放到右边:矩阵运算是从右向左

四元数与旋转公式
四元数
罗德里格斯旋转公式
Rodrigue's Rotation Formula: Raotation by angle \(\alpha\) around axis \(\vec{n}\)
In the formula
I :Identity matrix
最后乘积的结果是一个3*3的矩阵
MVP变换
Model Transformation
引用博客:MVP变换
对模型进行模型变换时,需要注意坐标系是在世界坐标系原点。当绕模型中心进行变换时,首先要将模型的中心点移动到世界坐标系的原点,之后在进行模型变换,之后移回到原来的位置。
矩阵描述为:$$M=M_t^{-1} M_r M_s M_t$$
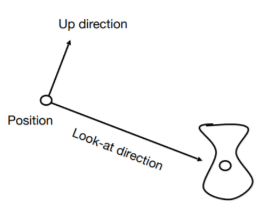
View/Camera Transformation
这个过程是将确定相机的位置:将相机的位置通过下面的过程移动到固定的点和方向。
(1) 相机的位置固定在世界坐标系的原点: \(\vec{e}\)
(2) 相机的朝向 \(-\vec{Z}\): \(\hat{g}\)
(3) 相机的向上方向\(\vec Y\): \(\hat t\)
基于上述过程,要求视图变换矩阵\(M_{view}\)分别求相机的平移矩阵\(T_{view}\)、旋转矩阵\(R_{view}\)
求旋转矩阵时,直接求相机旋转到原点的矩阵不容易求解,但求原点到相机位置的旋转矩阵容易求。
所以先求原点到相机的旋转矩阵:Z To \(-\hat{g}\)、Y To \(\hat{t}\)、最后保证\(\vec{X}\) To \((\hat g \times \hat t)\) 朝向的方向,原因是保证符合右手坐标系。
因为\(R_{view}^{-1}\)是正交矩阵,所以逆矩阵和旋转矩阵相同。
所以
Projection Transformation
个人理解投影变换的终极目的是让物体挤压在一个单位大小的平面(空间)内。原因先挖个坑。
Orthographic Projection
简单理解就是将物体的忽略z坐标,将模型通过Scale To [-1,-1]^2平面内。
真正的操作:
(1) 移动模型的位置到原点
(2) 缩放模型到空间[-1,1]^3中

Perspective Projection
正视投影的光线可以看成是一个立方体,如上图。透视投影的光线可以看成一个视锥,如下图。
透视变换可以分为两个步骤进行:
(1) 将视锥挤压到立方体内\(M_{persp->ortho}\)
(2) 将挤压后的视锥进行正视投影变换$M_{ortho}

挤压时的变换矩阵\(M_{persp->ortho}=\begin{bmatrix}
n&0&0&0\\
0&n&0&0\\
0&0&n+f&-nf\\
0 & 0&1&0
\end{bmatrix}\)
所以投影变换矩阵

 浙公网安备 33010602011771号
浙公网安备 33010602011771号