Ubuntu中darkros调用gpu加速
加速运行!!!
NVIDIA驱动:
sudo ubuntu-drivers devices
sudo ubuntu-drivers autoinstall
(一定要)重启
nvidia-smi
出现
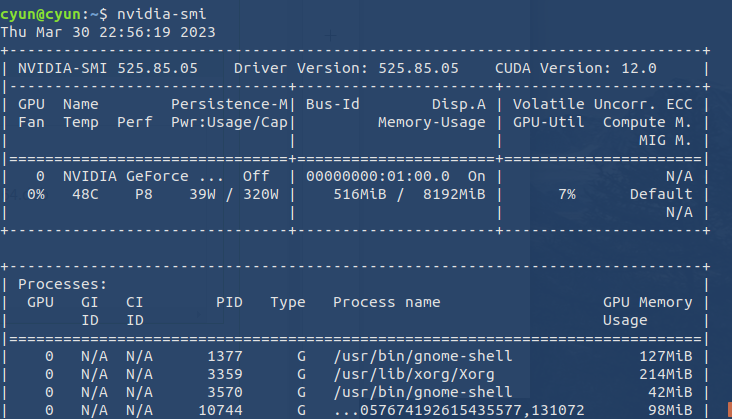
cuda:由nvidia-smi可以看到cuda的version
之后去官网:https://developer.nvidia.com/cuda-toolkit-archive
我下载的是12.0.0
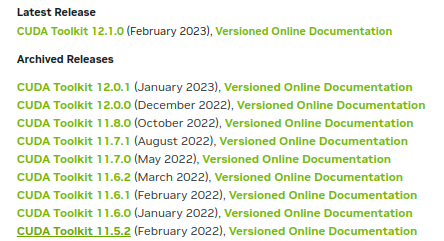
选择这些,然后按照指令安装即可。
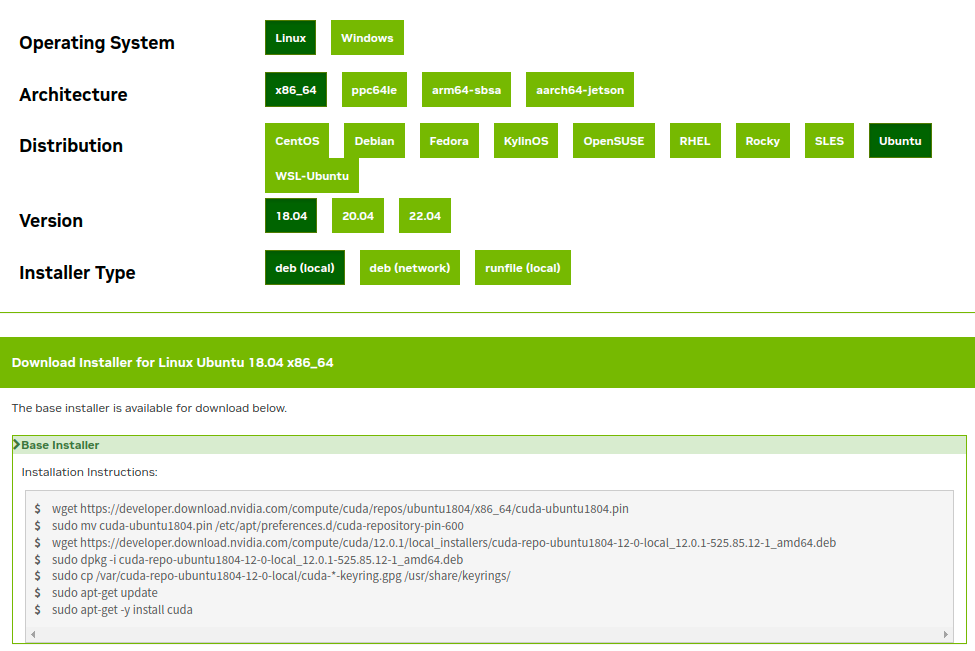
当然还可以去下载cudnn
xxxx这里忘了记录了。
既然启动了硬件加速,检验一下性能就好的就是用图像检测了yolov3
1.安装darknet-ros
git clone --recursive git@github.com:leggedrobotics/darknet_ros.git
建立工作空间编译。
catkin_make -DCMAKE_BUILD_TYPE=Release
安装好usb-cam驱动,调用摄像头:
sudo apt-get install ros-melodic-usb-cam
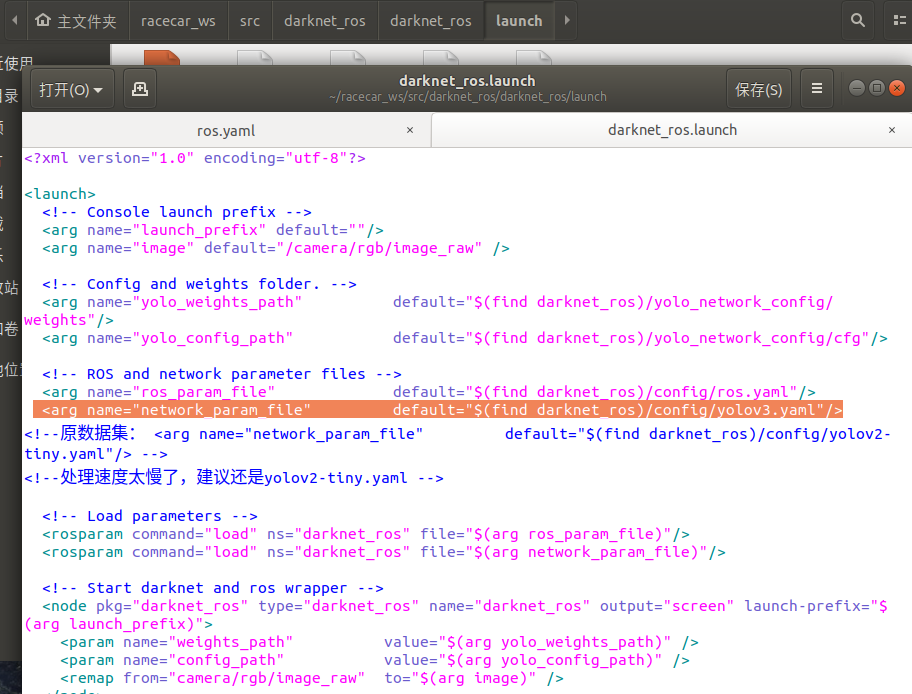
修改darknet-ros中的配置文件:
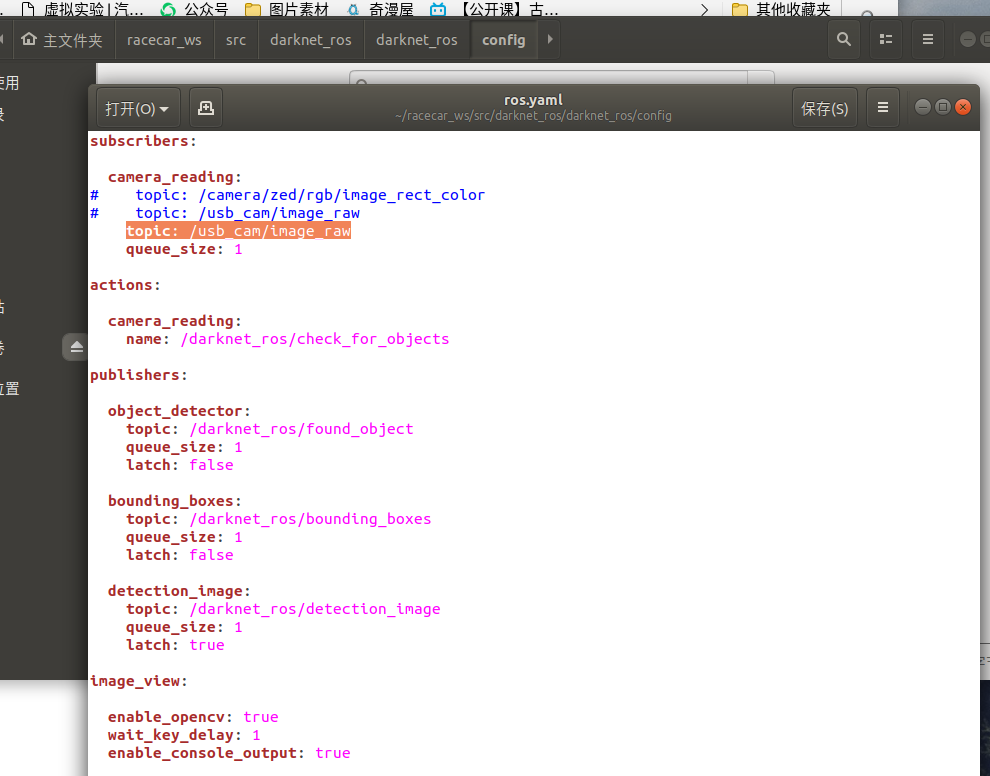
同时把yolov2-tiny改成yolov3
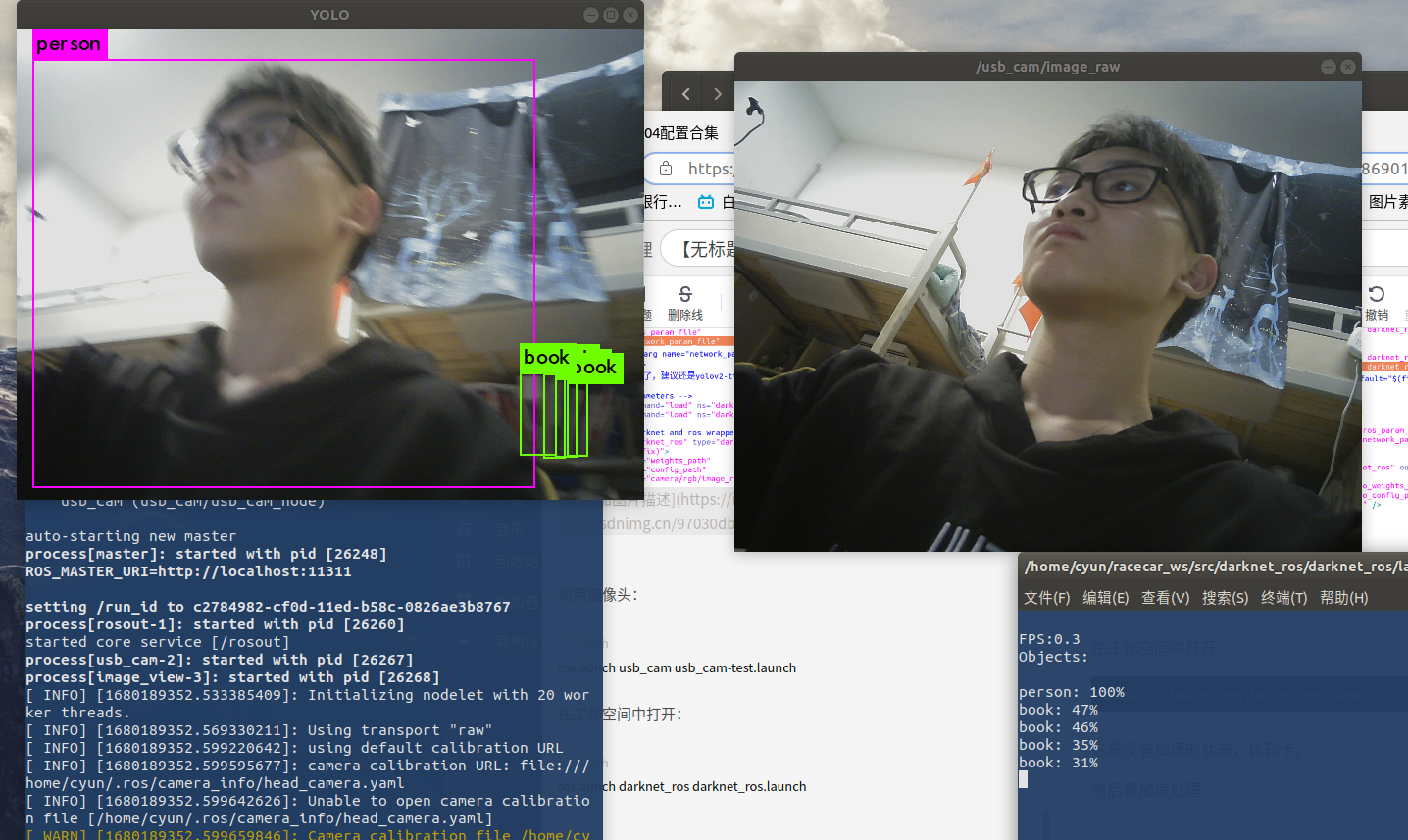
调用摄像头:
roslaunch usb_cam usb_cam-test.launch
在工作空间中打开:
roslaunch darknet_ros darknet_ros.launch
这是没有加速的状态,FPS特别小,而且比较卡。
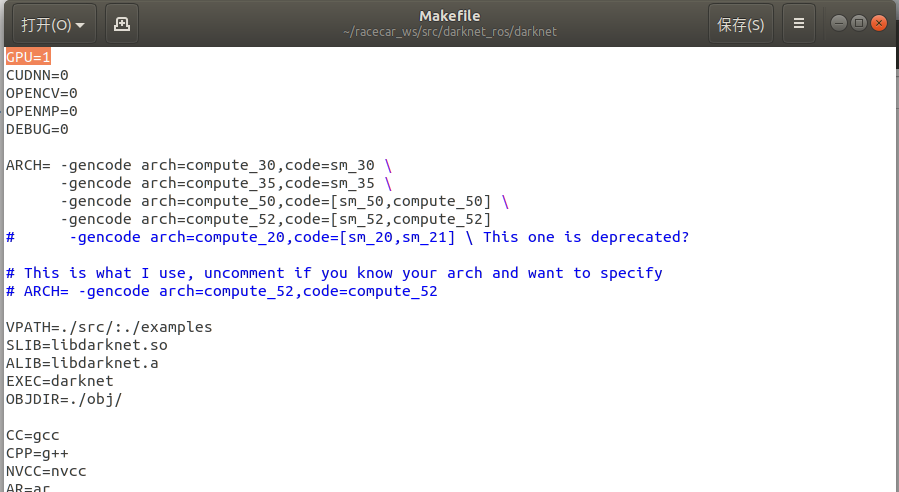
设置gpu=1
(cudnn=1,opencv=1也可)
重新catkin_make
然后看加速处理:
fps一直变化,但基本都有上百。
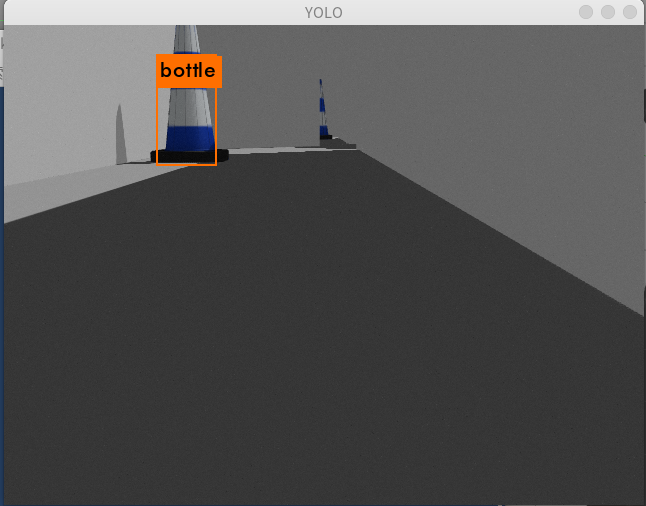

(ros接的一个gazebo仿真)
当然这里面其实会报很多错误,跟你的显卡算力等有关,建议自己去尝试一下。
搭建racecar的gazebo仿真环境1
gazebo仿真+yolov3仿真环境2
ros中编译darkros,训练自己的数据集
修改darkros的gpu设置

 浙公网安备 33010602011771号
浙公网安备 33010602011771号