差分算法(求解偏微分方程)
差分算法是数学建模比赛中的一种十分常见的代码,在2018A题和2020A中均用到一维热传导模型,模型的求解用的就是差分算法,具体如何解可以自己去查看相关论文。
定义
差分方法又称为有限差分方法或网格法,是求偏微分方程定解问题的数值解中应用 最广泛的方法之一。它的基本思想是:先对求解区域作网格剖分,将自变量的连续变化 区域用有限离散点(网格点)集代替;将问题中出现的连续变量的函数用定义在网格点 上离散变量的函数代替;通过用网格点上函数的差商代替导数,将含连续变量的偏微分 方程定解问题化成只含有限个未知数的代数方程组(称为差分格式)。如果差分格式有 解,且当网格无限变小时其解收敛于原微分方程定解问题的解,则差分格式的解就作为 原问题的近似解(数值解)。因此,用差分方法求偏微分方程定解问题一般需要解决一下问题:
- 选取网络;
- 对微分方程及定解条件选择差分近似,列出差分格式;
- 求解差分格式;
- 讨论差分格式解对于微分方程解的收敛性及误差估计
算法详解
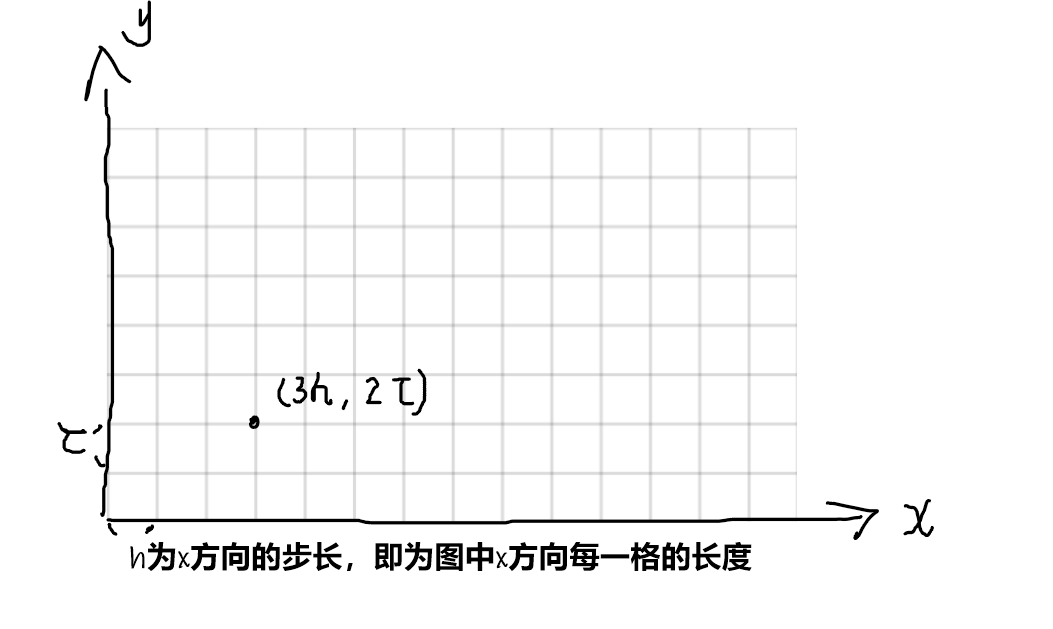
因此,只要确定了步长,我们就可以将连续变化的自变量用有限离散点来表示
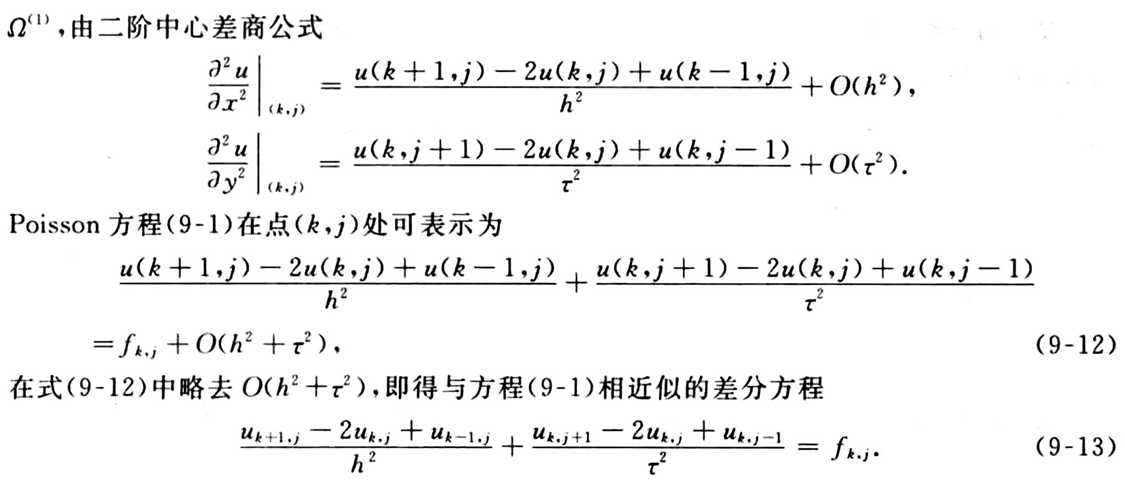
对于(9-3)的式子,为了方便计算,我们用差分来表示偏微分方程
\[\frac{\partial^2u}{\partial x^2}+\frac{\partial^2u}{\partial y^2}=f(x,y)
\]
由于式子中进行了两次偏导,因此我们一步一步进行分析。
进行一次差分,我们用向前差分。
\[\frac{\partial u}{\partial x}=\frac{u(k+1,j)-u(k,j)}{h}
\]
由于向前差分有误差,如果我们进行两次向前差分的话,计算的误差可能会增大,因此,第二次偏导我们选择向后差分。即我们混合向前差分、向后差分来近似代替两次偏导。
因此,第二次我们用向后差分
\[\begin{aligned}
\frac{\partial^2u}{\partial x^2}&=\frac{\partial}{\partial x}(\frac{u(k+1,j)-u(k,j)}{h})\\
& = \frac{\partial}{\partial x}(\frac{u(k+1,j)}{h})-\frac{\partial}{\partial x}(\frac{u(k,j)}{h})
\end{aligned}
\]
\[\begin{aligned}
\frac{\partial}{\partial x}(\frac{u(k+1,j)}{h})&=\frac{\frac{u(k+1,j)-u(k,j)}{h}\cdot h-0}{h^2}\\
&=\frac{u(k+1,j)-u(k,j)}{h^2}
\end{aligned}
\]
\[\begin{aligned}
\frac{\partial}{\partial x}(\frac{u(k,j)}{h})&=\frac{\frac{u(k,j)-u(k-1,j)}{h}\cdot h-0}{h^2}\\
&=\frac{u(k,j)-u(k-1,j)}{h^2}
\end{aligned}
\]
综上,
\[\begin{aligned}
\frac{\partial^2u}{\partial x^2}&=\frac{\partial}{\partial x}(\frac{u(k+1,j)-u(k,j)}{h})\\
& = \frac{\partial}{\partial x}(\frac{u(k+1,j)}{h})-\frac{\partial}{\partial x}(\frac{u(k,j)}{h})\\
&=\frac{u(k+1,j)-u(k,j)}{h^2}-\frac{u(k,j)-u(k-1,j)}{h^2}\\
&= \frac{u(k+1,j)-2u(k,j)+u(k-1,j)}{h^2}
\end{aligned}
\]
同理可得
\[\frac{\partial^2u}{\partial y^2}=\frac{u(k,j+1)-2u(k,j)+u(k,j-1)}{\tau^2}
\]
所以原方程就变为
\[\frac{\partial^2u}{\partial x^2}+\frac{\partial^2u}{\partial y^2}=f(x,y)\\
\frac{u(k+1,j)-2u(k,j)+u(k-1,j)}{h^2}+\frac{u(k,j+1)-2u(k,j)+u(k,j-1)}{\tau^2}=f(x,y)
\]
以上的进行通过混合向前差分、向后差分的方法求二阶偏导的方法实际上就是二阶中心差分
常见的差分
向前差分
函数的前向差分通常简称为函数的差分。对于函数f(x),如果在等距节点:
\[x_k=x_0+kh(k=0,1,\cdots,n)
\]
\[\Delta f(x_k)=f(x_{k+1})-f(x_k)
\]
则称Δf(x),函数在每个小区间上的增量$$y(k+1)-y(k)$$为f(x)的一阶前向差分。在微积分学中的有限差分(finite differences),前向差分通常是微分在离散的函数中的等效运算。差分方程的解法也与微分方程的解法相似。当是多项式时,前向差分为Delta算子,一种线性算子。前向差分会将多项式阶数降低1
由于向前差分可以从已知的值求解出结果,所以我们称向前差分为显式差分。
向后差分
向后差分为隐式差分方法,无条件稳定。
对于函数\(f(x_k)\),一阶向后差分为:
\[\Delta f(x_k)=f(x_k)-f(x_{k-1})
\]
Crank-Nicolson差分 (CN差分)
Crank-Nicolson差分格式又称为中心差分格式。Crank-Nicolson方法式显式方法和隐式方法的结合,式无条件稳定的方法,公式看起来复杂,但是考虑到提高的精度和保证的稳定性。
\[\begin{aligned}
\Delta f(x_k)&=\frac{1}{2}(f(x_{k+1})-f(x_k)+f(x_k)-f(x_{k-1}))\\
&=\frac{1}{2}(f(x_{k+1})-f(x_{k-1}))
\end{aligned}
\]
对于扩散方程(包括许多其他方程),可以证明Crank-Nicolson方法无条件稳定。但是,如果时间步长与空间步长平方的比值过大(一般地,大于1/2),近似解中将存在虚假的振荡或衰减。基于这个原因,当要求大时间步或高空间分辨率的时候,往往会采用数值精确较差的后向欧拉方法进行计算,这样即可以保证稳定,又避免了解的伪振荡。
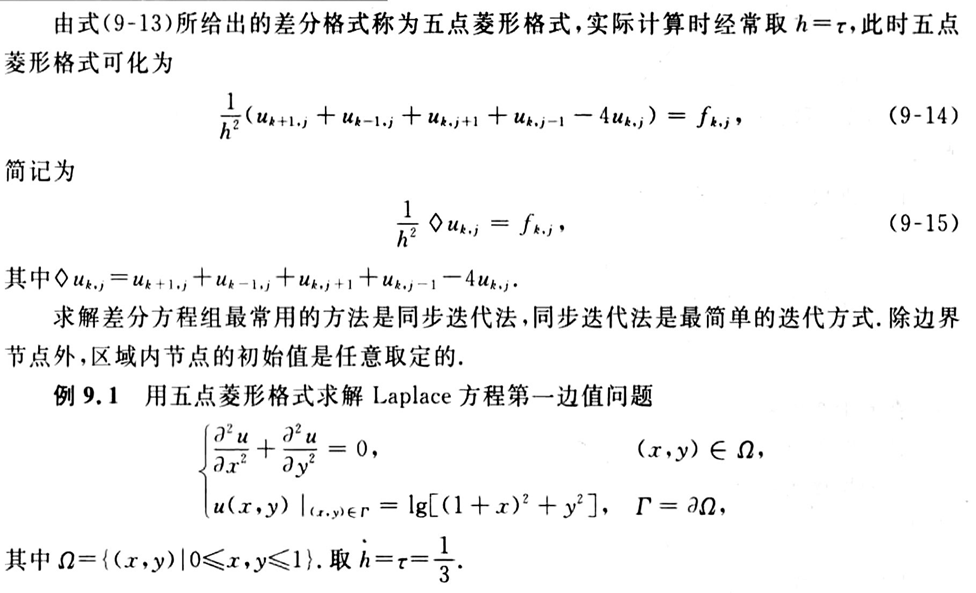
例题
用五点菱形个格式求解Laplace方程第一边值问题
\[\begin{cases}
\frac{\partial^2u}{\partial x^2}+\frac{\partial^2u}{\partial y^2}=0,&(x,y)\in \Omega\\
u(x,y)|_{(x,y)\in \Gamma}=\lg [(1+x)^2+y^2],&\Gamma=\partial \Omega,
\end{cases}
\]
其中\(\Omega=\left\{ (x,y)|0 \leq x,y \leq 1 \right\}\),取\(h=\tau=\frac{1}{3}\)
解:
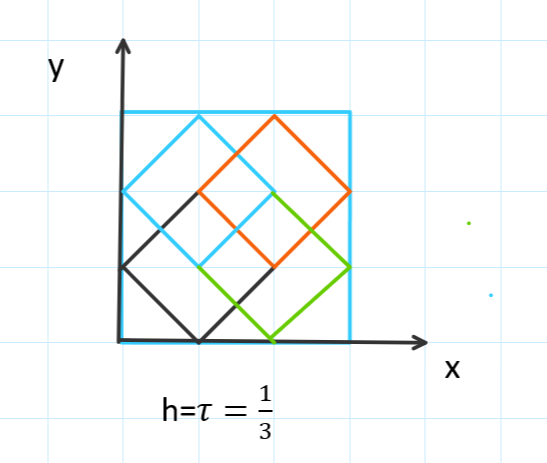
根据题意,我们画出网格出来,正好构成四个五点菱形,即得到四个方程,我们将线性方程组写出来
\[\begin{cases}
\frac{1}{h^2}(u_{1,2}+u_{2,1}+u_{1,0}+u_{0,1}-4u(1,1))=0\\
\frac{1}{h^2}(u_{2,2}+u_{3,1}+u_{2,0}+u_{1,1}-4u(2,1))=0\\
\frac{1}{h^2}(u_{1,3}+u_{2,2}+u_{1,1}+u_{0,2}-4u(1,2))=0\\
\frac{1}{h^2}(u_{2,3}+u_{3,2}+u_{2,1}+u_{1,2}-4u(2,2))=0
\end{cases}
\]
线性方程组又可以化简成
\[\begin{bmatrix}
-4 & 1 &1 &0 \\
1 & -4 & 0 & 1 \\
1 & 0 & -4 & 1\\
0 & 1 & 1 & -4
\end{bmatrix}
\begin{bmatrix}
u_{1,1}\\
u_{1,2}\\
u_{2,1}\\
u_{2,2}
\end{bmatrix}=-
\begin{bmatrix}
u_{1,0}+u_{0,1}\\
u_{3,1}+u_{2,0}\\
u_{1,3}+u_{0,2}\\
u_{2,3}+u_{3,2}
\end{bmatrix}
\]
解非齐次线性方程组求得:
\[u_1=0.6348,
u_2=1.06,
u_3=0.7985,
u_4=1.1698
\]
计算的MATLAB程序如下
clc;
clear;
f1 = @(x)2 * log(1+x);
f2 = @(x)log((1+x).^2+1);
f3 = @(y)log(1+y.^2);
f4= @(y)log(4+y.^2);
u=zeros(4);
m=4;% 总列数
n=4;% 总行数
h=1/3;
u(1,1:m)=feval(f3,0:h:(m-1)*h)';
u(n,1:m)=feval(f4,0:h:(m-1)*h)';
u(1:n,1)=feval(f1,0:h:(n-1)*h);
u(1:n,m)=feval(f2,0:h:(n-1)*h);
b = -[u(2,1)+u(1,2);u(4,2)+u(3,1);u(2,4)+u(1,3);u(3,4)+u(4,3)];
a = [-4,1,1,0;1,-4,0,1;1,0,-4,1;0,1,1,-4];
x=a\b;
代码解读
观察线性方程:
\[\begin{bmatrix}
-4 & 1 &1 &0 \\
1 & -4 & 0 & 1 \\
1 & 0 & -4 & 1\\
0 & 1 & 1 & -4
\end{bmatrix}
\begin{bmatrix}
u_{1,1}\\
u_{1,2}\\
u_{2,1}\\
u_{2,2}
\end{bmatrix}=-
\begin{bmatrix}
u_{1,0}+u_{0,1}\\
u_{3,1}+u_{2,0}\\
u_{1,3}+u_{0,2}\\
u_{2,3}+u_{3,2}
\end{bmatrix}
\]
这个形式为最小二乘法的形式
参考Matlab中的线性最小二乘的标准型:
\[\min _A \Vert RA-Y \Vert_2^2
\]
所以我们只需要求出等式右边的式子,那么我们就可以解出等式中间的向量
现在我们来解等式右边的向量,观察可知,为定义域的边界
注意这里从1开始,与上式子有些不同
\[\begin{bmatrix}
u_{1,1} & u_{1,2} & u_{1,3} & u_{1,4}\\
u_{2,1} & u_{2,2} & u_{2,3} & u_{2,4}\\
u_{3,1} & u_{3,2} & u_{3,3} & u_{3,4}\\
u_{4,1} & u_{4,2} & u_{4,3} & u_{4,4}
\end{bmatrix}
\]
因此我们只需要解出边界的值,就可以把b表示出来

 浙公网安备 33010602011771号
浙公网安备 33010602011771号