【双轮无人车】开源项目整理
一、轮腿机器人Hyun
开源地址:https://github.com/HuGuoXuang/Hyun
演示视频:https://www.bilibili.com/video/BV1Ub4y1s737/
腾讯云讲解博客:https://cloud.tencent.com/developer/article/2176078?areaSource=103001.1&traceId=tIXhXR6humMyjmL6pBcoK

二、Sk8o [skeɪtəʊ] –二足轮式平衡机器人
参考文档:https://wiki.control.fel.cvut.cz/mediawiki/images/9/92/Dp_2021_kollarcik_adam.pdf
开源地址:https://gitlab.fel.cvut.cz/kollaada/master-thesis-by-adam-kollarcik
演示视频:https://www.bilibili.com/video/BV1Kv411s7hy/?spm_id_from=333.788.recommend_more_video.0&vd_source=72e4a85c69a1032f14edeb21f62ac2ba

三、LeTian-robot2(轮腿机器人)
开源地址:https://oshwhub.com/z.sir/letian-robot2
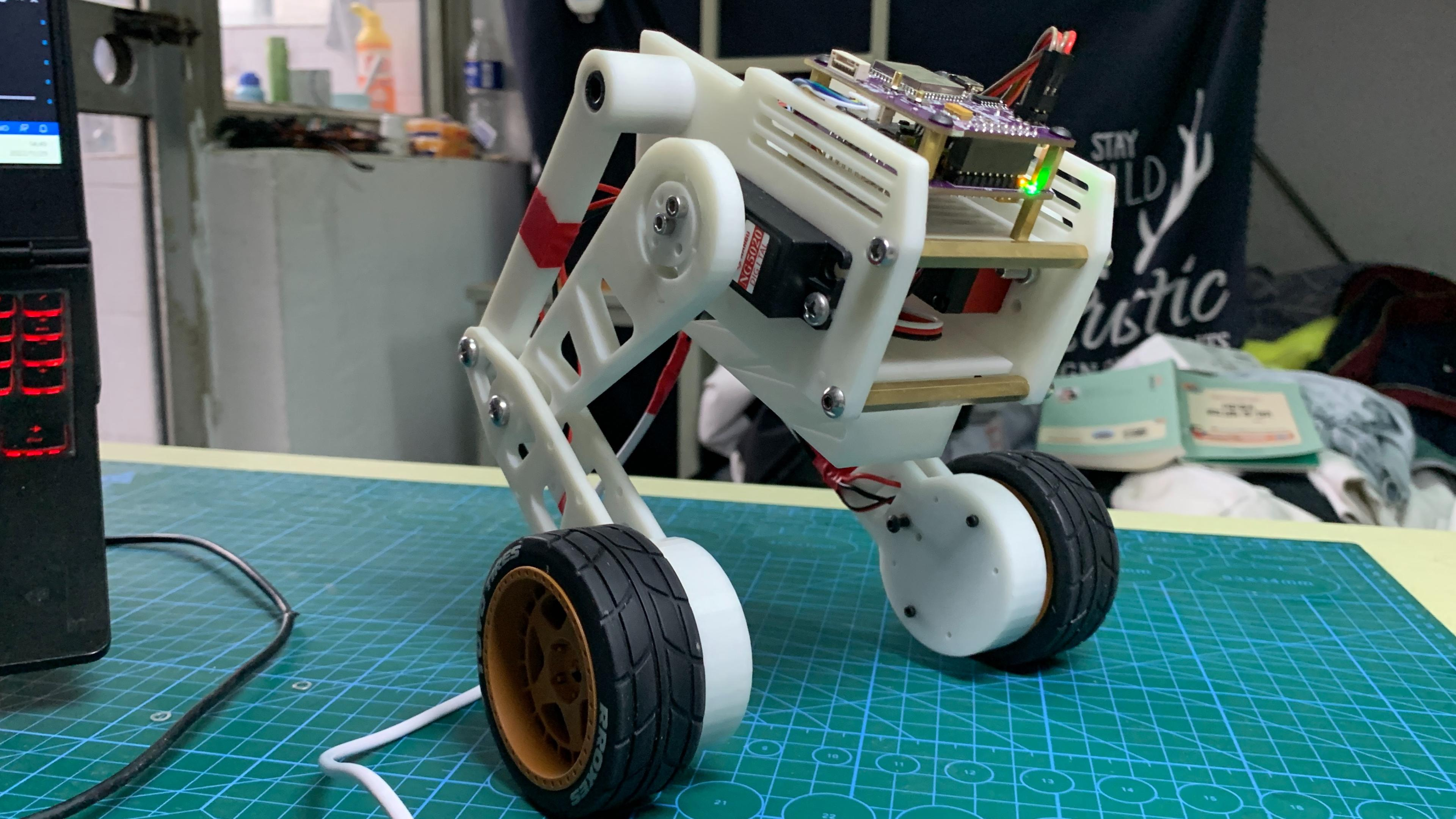
项目介绍: LeTian-robot2(轮腿机器人),项目灵感来源为Ascento机器人,设计的初衷是通过轮足机器人的制作,学习控制算法以及实现最终的跳跃功能。由于整个系统理论知识庞大,目前能力有限跳跃功能的理论设计、建模仿真、实物仿真暂时未能实现,预计明年6月前实现,目前实现的功能有自动关自平衡、身高调节、无线控制。由于ESP32S3支持离线语音识别,固下一步会将离线语音识别添加至此项目,离线语音开发仅支持ESP-IDF平台。
四、乐天平衡步兵
开源地址:https://oshwhub.com/le-tian-er-hao/le-tian-xiu-gai
全部采用esp32,主控和驱动主控中间采用usart通讯,预留了iic和spi,可以以防万一。
驱动现在先采用l6234d,不过现在6234很阴间,价格死高,准备找替换品。
驱动采用foc和电流,磁编码器闭环
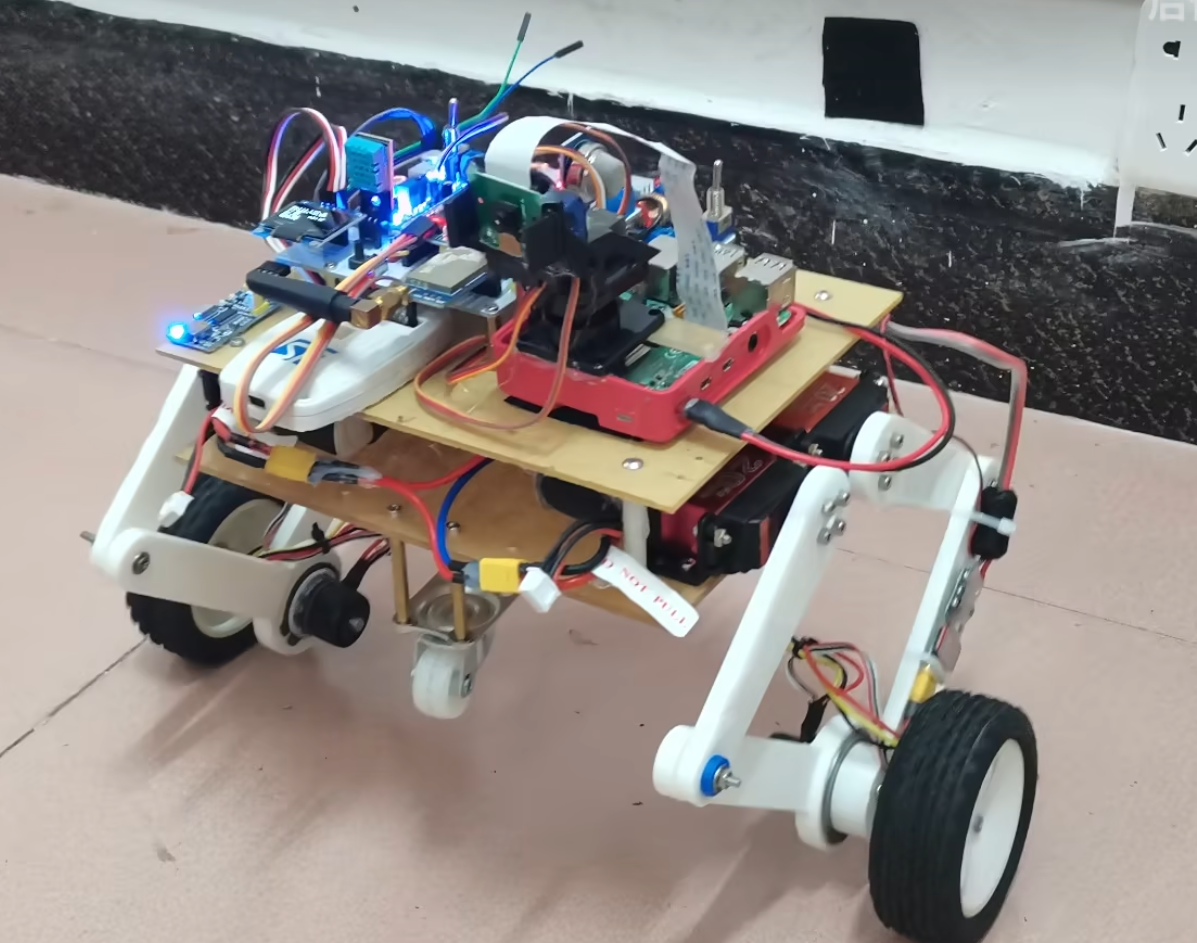
五、本科毕设 轮腿式双足机器人
开源项目文件:开源链接:https://pan.baidu.com/s/1HZoyQxGxh-SVvtj2k9SgEQ 提取码:9ah2
演示视频:https://www.bilibili.com/video/av383858616/?vd_source=72e4a85c69a1032f14edeb21f62ac2ba

本项目在机械结构总体布局和腿部连杆机构上参考借鉴了ARX-4开源模型,在轮系结构上学习借鉴了东莞理工学院 ACE战队开源的轮毂连接设计方案,嵌入式代码是在RoboMaster组委会开源的C板官方步兵代码基础上修改得到。在此诚挚感谢上述开源项目对本项目的启发和帮助。
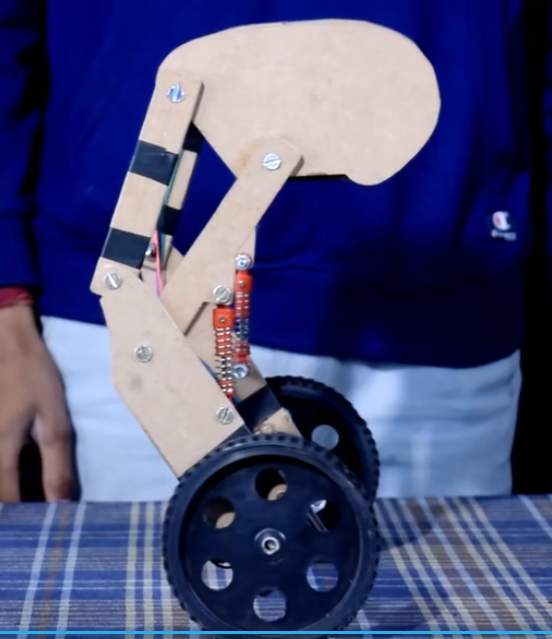
六、基于arduino的自平衡机器人
链接:https://pan.baidu.com/s/12kXVpMKXX3T-nNhoR2DMEA
提取码:ev4f
演示视频:【基于arduino的自平衡机器人】 https://www.bilibili.com/video/BV1s541187YM/?share_source=copy_web&vd_source=f2ddfb073728b5398fc89c062f6fb78d
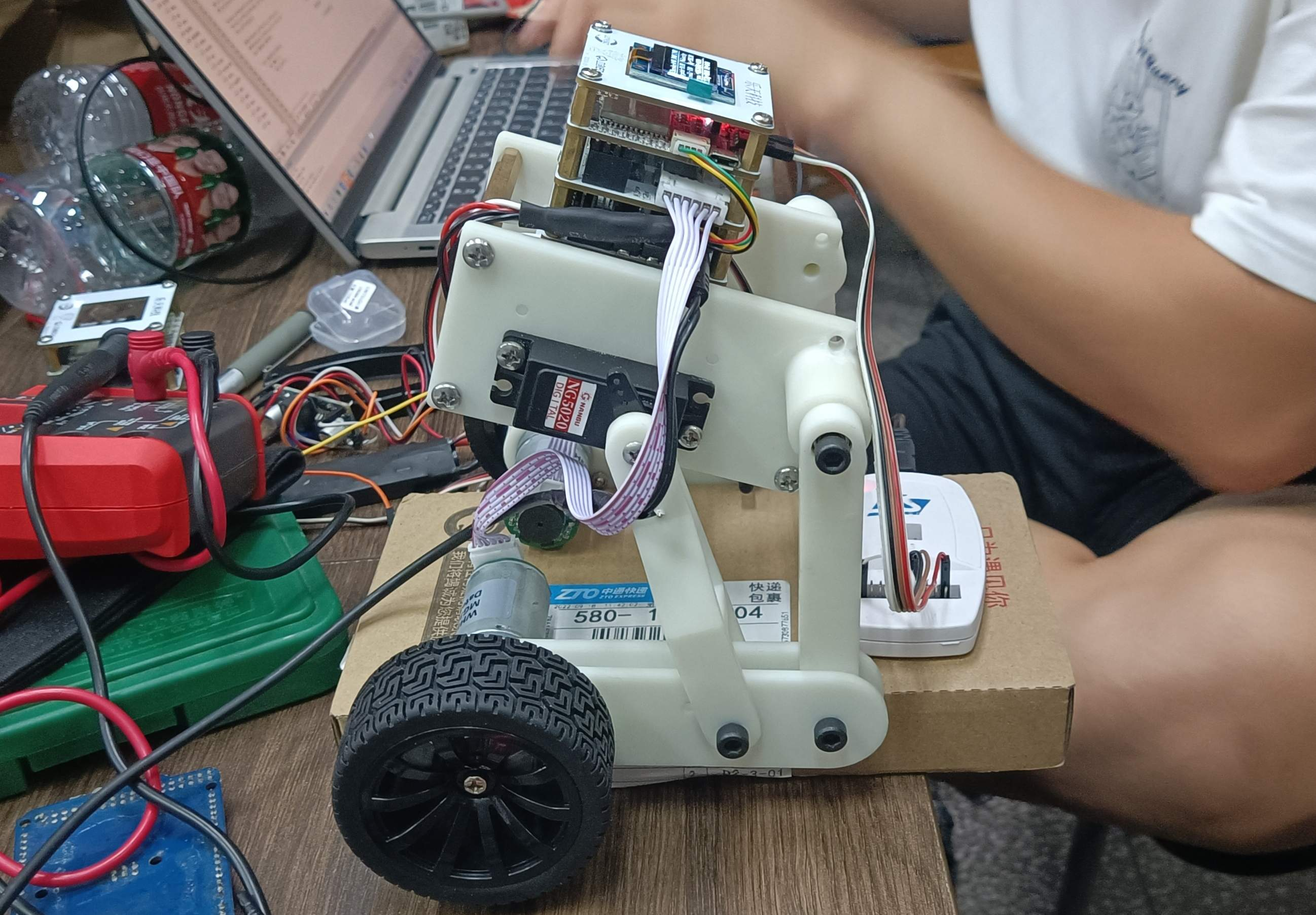
七、毕业设计:双足轮机器人(开源)
链接:https://pan.baidu.com/s/10k0_A_xpAeHuzHxA6Mpw1Q
提取码:0ys5
遥控部分立创开源广场开源连接:https://oshwhub.com/bhwj/esp32-yao-kong
演示视频:【毕业设计:双足轮机器人(开源)】https://www.bilibili.com/video/BV1cD4y1y77B?vd_source=f2ddfb073728b5398fc89c062f6fb78d
控制系统使用了树莓派+STM32,包含APP、ESP32 LoRa遥控等
可以实现4G远程控制图传、平衡移动、通过简单的障碍等
八、
00、其他
【001】博文:腾讯Ollie轮腿机器人论文阅读及分享
https://zhuanlan.zhihu.com/p/619764891
【002】文章推荐 | 轮足可切换双足轮腿机器人轮式动态运动控制
http://www.ius.sdu.edu.cn/info/1026/2436.htm
【003】自重构模块化轮腿足机器人

 浙公网安备 33010602011771号
浙公网安备 33010602011771号