
基于云台结构的姿态旋转传递 - 基于四元数
基于云台结构的姿态旋转传递 - 基于四元数
通过基座姿态和云台关节角得到负载的姿态
参考文献:
四元数乘法:https://blog.csdn.net/benchuspx/article/details/108523498
四元数实现绕轴旋转:https://blog.csdn.net/cww_sh26/article/details/123339793
内旋和外旋:
Math Basic
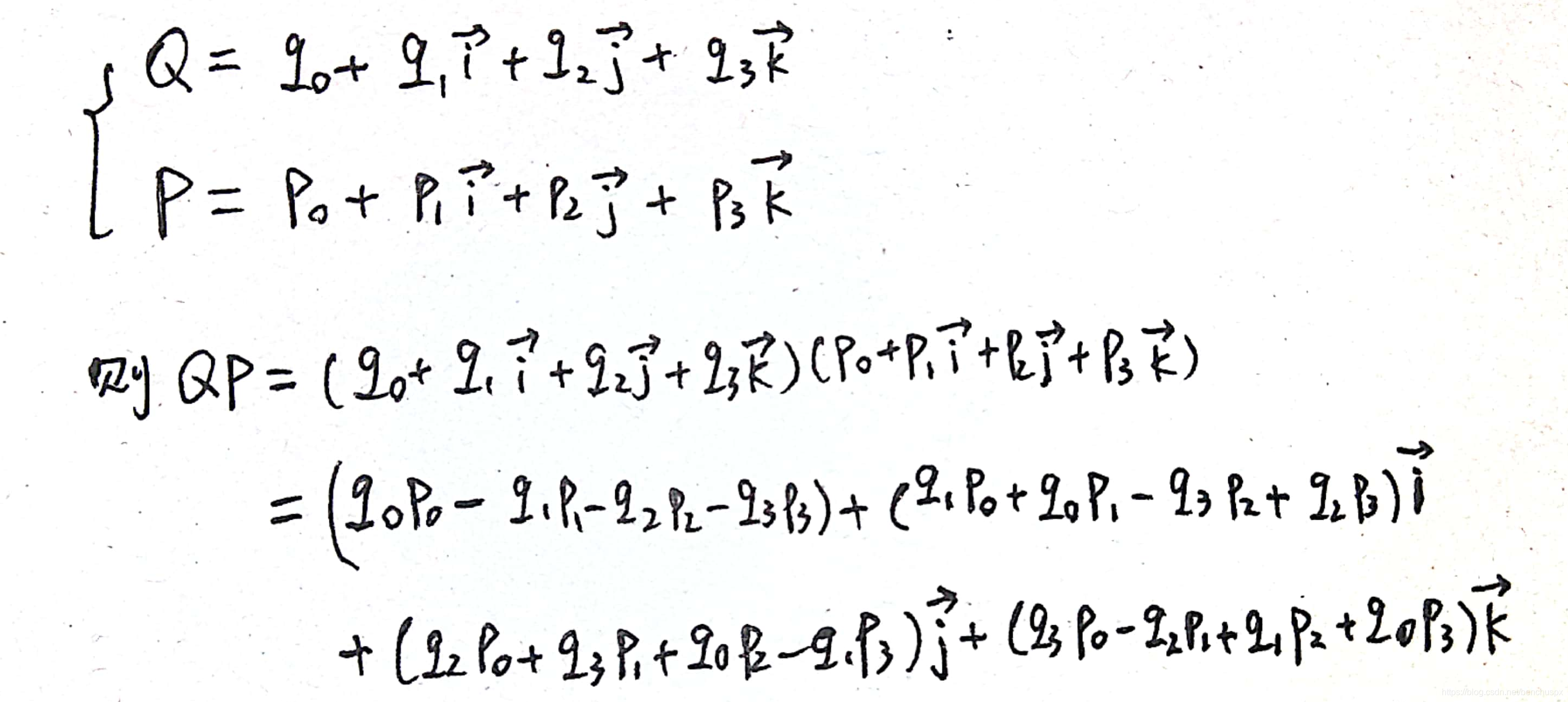
四元数乘法
以机体坐标系做旋转
一个在机体坐标系下的旋转信息四元数 qB
只需要将 qB * (需要旋转的姿态qA) 即可得到以机体坐标系旋转后的qA,且qA的坐标系不改变
四元数绕轴旋转
问题:已知单位方向向量v=(vx,vy,vz),求绕v旋转角度ω(逆时针为正)的旋转矩阵。
实现方法:
首先计算单位四元素:q = (q0, q1, q2, q3)
- q0 = cos(ω/2)
- q1 = vx*sin(ω/2)
- q2 = vy*sin(ω/2)
- q3 = vz*sin(ω/2)
接着,使用单位四元素计算旋转矩阵;
void UnitQuaternion2Rotation(const double* q, double* rot) { rot[0] = q[0] * q[0] + q[1] * q[1] - q[2] * q[2] - q[3] * q[3]; rot[1] = (q[1] * q[2] - q[0] * q[3]) * 2; rot[2] = (q[1] * q[3] + q[0] * q[2]) * 2; rot[3] = (q[2] * q[1] + q[0] * q[3]) * 2; rot[4] = q[0] * q[0] - q[1] * q[1] + q[2] * q[2] - q[3] * q[3]; rot[5] = (q[2] * q[3] - q[0] * q[1]) * 2; rot[6] = (q[3] * q[1] - q[0] * q[2]) * 2; rot[7] = (q[3] * q[2] + q[0] * q[1]) * 2; rot[8] = q[0] * q[0] - q[1] * q[1] - q[2] * q[2] + q[3] * q[3]; }
基座姿态到负载姿态的传递
定义三轴的旋转角度,rotAngX rotAngY rotAngZ。分别表示绕轴X,Y,Z旋转的角度(右手定则?)
注意:旋转的角度需要遵循右手定则,不然角度会相反
获得分别绕X,Y,Z轴的旋转四元数(机体坐标系)
rotQX = quaternion(cos(rotAngX/2),1*sin(rotAngX/2),0,0);
rotQY = quaternion(cos(rotAngY/2),0,1*sin(rotAngY/2),0);
rotQZ = quaternion(cos(rotAngZ/2),0,0,1*sin(rotAngZ/2));
按照顺序应用传递:
假设初始姿态为
qa(大地坐标系)
qa = rotQY * rotQX * rotQZ * qa; //错误的,这个是外旋,姿态传递应当为外旋
正确的公式如下:
qa = qa * rotQZ * rotQX * rotQY;
得到的 qa 即为按照 Z -> X -> Y 轴旋转后的姿态信息(坐标系不变)
化简
三个四元数相乘可以化简成一个四元数直接与qa相乘
rotQX * rotQZ化简结果
令x = rotAngX / 2z = rotAngZ / 2\[qT = rotQX * rotQZ = cos(x)cos(z) + sin(x)cos(z)i - sin(x)sin(z)j+cos(x)sin(z)k \]
rotQY * qT化简结果
令y = rotAngY / 2,并令qT中的实数项,ijk的系数分别为a,b,c,d\[rotQY * qT = (cos(y)a-sin(y)c) + (cos(y)b+sin(y)d)i+(sin(y)a +cos(y)c)j+(-sin(y)b+cos(y))k \]
即:
可以通过获得三轴关节角度和基座姿态来获取负载的姿态
Matlab 代码
function finRot = rotTransfer(q0,q1,q2,q3,angX,angY,angZ)
% qa = quaternion(0.931698,0.002579,-0.005492,0.363183);
qa = quaternion(q0,q1,q2,q3);
% rotAngX = deg2rad(angX)/2;
% rotAngY = deg2rad(angY)/2;
% rotAngZ = deg2rad(angZ)/2;s
rotAngX = angX/2;
rotAngY = angY/2;
rotAngZ = angZ/2;
rotQX = quaternion(cos(rotAngX),1*sin(rotAngX),0,0);
rotQY = quaternion(cos(rotAngY),0,1*sin(rotAngY),0);
rotQZ = quaternion(cos(rotAngZ),0,0,1*sin(rotAngZ));
% finRot = rotQY * rotQX * rotQZ * qa;
finRot = qa * rotQZ * rotQX * rotQY; %这个才是正确的
%finRot = qa * rotQZ * rotQY * rotQX;
finRot = finRot.normalize();
% [e1,e2,e3] = quat2angle(finRot,"ZYX");
% e1 = rad2deg(e1);
% e2 = rad2deg(e2);
% e3 = rad2deg(e3);
end

 浙公网安备 33010602011771号
浙公网安备 33010602011771号