
PID 算法理解
PID 算法
使用环境:受到外界的影响不能按照理想状态发展。如小车的速度不稳定的调节,尽快达到目标速度。
条件:闭环系统->有反馈
要求:快准狠
分类:位置式、增量式
增量式
输入:前次速度、前前次速度、前前前次速度
输出:pwm的增加值或减少值
位置式
输入:
输出:
公式
 或
或

Kp 比例放大系数 Ti 积分时间 Td 微分时间
Kp比例放大系数 Ki 积分系数 Kd 微分系数
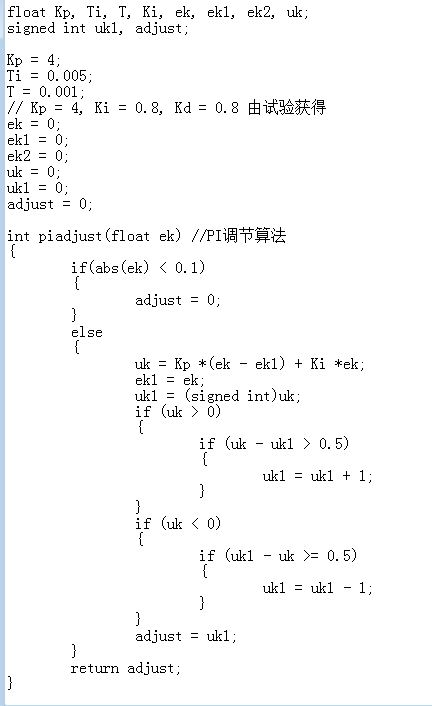
程序
首先,置Kd=Ki=0,然后增加比例系数一直到系统开始振荡(闭环系统的极点在jω轴上);
再将该比例系数乘以0.6,其他参数按照以下公式计算:
Kp = 0.6*Km
Kd = Kp*π/4*ω
Ki = Kp*ω/π
上式中Kp为比例控制参数
Kd为微分控制参数
Ki为积分控制参数
Km为系统开始振荡时的比例值;
ω为振荡时的频率 参数整定找最佳,从小到大顺序查 先是比例后积分,最后再把微分加 曲线振荡很频繁,比例度盘要放大 曲线漂浮绕大湾,比例度盘往小扳 曲线偏离回复慢,积分时间往下降 曲线波动周期长,积分时间再加长 曲线振荡频率快,先把微分降下来 动差大来波动慢,微分时间应加长 理想曲线两个波,前高后低4比 1 一看二调多分析,调节质量不会低

 浙公网安备 33010602011771号
浙公网安备 33010602011771号