GNSS定位_UKF
算法描述
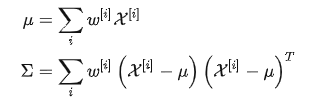
根据采样点集计算均值和方差:
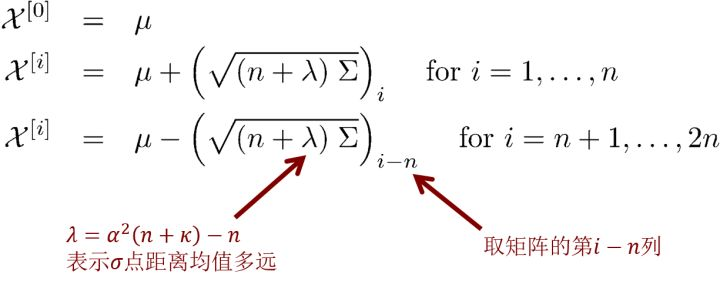
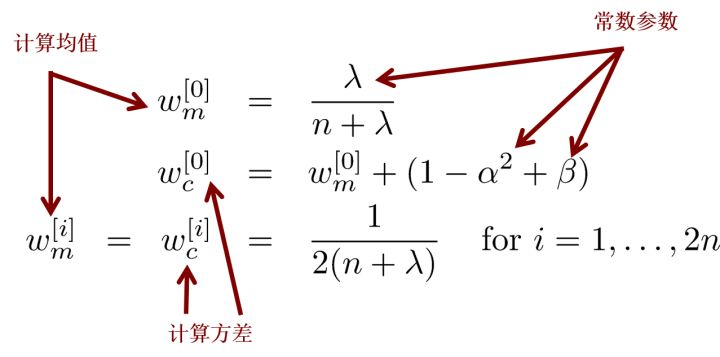
采样点集的生成及对应权重的生成:(根据估计量的均值和协方差阵进行生成)
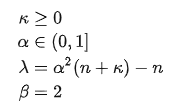
其中,参数满足的条件如下:
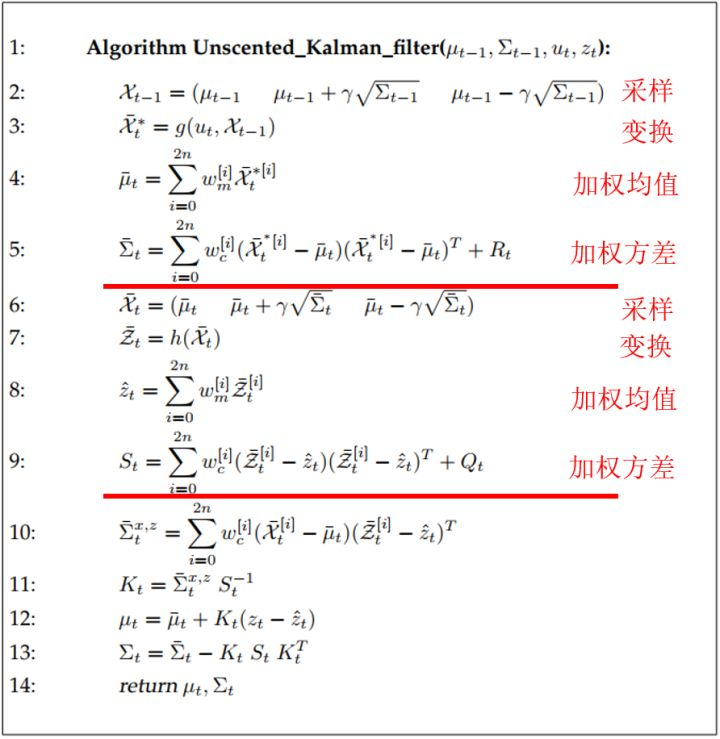
流程:
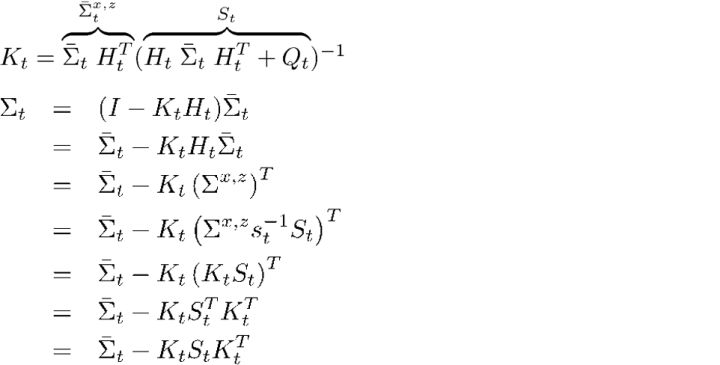
公式推导:
code实现
python code:
结果:
参考链接
记录每天生活的点点滴滴,呵呵呵呵呵呵

根据采样点集计算均值和方差:
采样点集的生成及对应权重的生成:(根据估计量的均值和协方差阵进行生成)
其中,参数满足的条件如下:
流程:
公式推导:
python code:
结果:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号