基于几何模型的跟踪方法——Pure Persuit算法
路径跟踪算法--Pure Persuit实现
1.算法简介
Pure Persuit是一种基于几何的路径跟踪算法,又叫作纯跟踪算法。该算法最早由R. Wallace在1895年提出。该方法的核心是基于当前车辆的后轮中心位置(车辆质心),在参考路径上设置前视距离\(l_d\),根据\(l_d\)的距离匹配一个预瞄点,然后车辆通过计算角速度移动到该预瞄点。
2.核心思想
- 几何跟踪:通过简单的几何关系实现路径跟踪,无需复杂的动力学模型
- 前视距离:通过设置前视距离\(l_d\),以车后轮中心为基点,通过控制前轮转向,使得车辆沿着预设圆弧移动到前视点。
- 曲率控制:根据\(l_d\)的距离,基于三角形正弦定理,计算转向半径,生成方向盘转角
3.原理推导
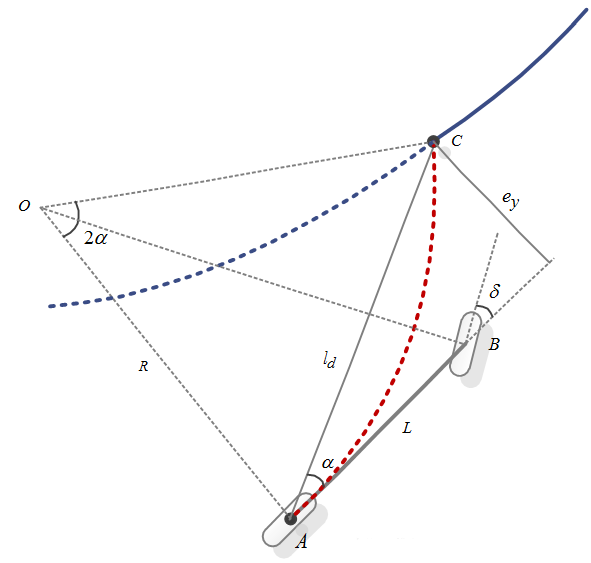
假设车辆后轮中心能够按照一定的转弯半径R行使到该预瞄点,然后根据前视距离\(l_d\)、转弯半径R、车辆坐标系下的朝向角\(\alpha\)之间的几何关系来计算前轮转角\(\delta\)
其中:
- R: 转弯半径
- \(l_d\): 前视距离
- \(\alpha\): 前视点和车辆当前位置倾角
- \(\delta\): 前轮转角
如上图,三角形OAC根据正弦定理有
\[\frac{l_d}{sin(2\alpha)}=\frac{R}{sin(\frac{\pi}{2}-\alpha)}
\]
化简得
\[R=\frac{l_d}{2sin\alpha}
\]
根据车辆的运动学方程有:
\[\delta=tan^{-1}\frac{L}{R}
\]
所以我们可以计算得到前轮倾角:
\[\delta=tan^{-1}\frac{2Lsin(\alpha)}{l_d}
\]
定义横向误差为后轮中心位置与预瞄点再横向的误差,如上图中的\(e_y\)
\[e_y=l_dsin(\alpha)
\]
当前轮转角很小时,横向误差可以近似为
\[e_y=l_dsin(\alpha) \approx \frac{{l_d}^2\delta}{2L} \Rightarrow \delta=\frac{2Le_y}{{l_d}^2}
\]
所以,该算法近似于一个P控制器,跟踪效果由前视距离决定。算法的本质就是对前视横向误差 \(e_{l_d}以\frac{2 L}{l_d^2}\)为比例系数的比例控制器。这样就建立起了转向角\(\delta\)和前视距离\(l_d\),还有车辆轴距L以及目标点方向和当前航向角夹角\(\alpha\)之间的关系。
4.算法实现步骤
- 1.确定车辆的当前位置。
- 2.找到规划路径中离车辆最近的路径点。
- 3.确定前视距离\(l_d\):由人为给定,通常认为和速度相关,车速很快的时候,就需要尽可能的看得远些;反之,车速比较慢时,需要看得比较近些。一种最常用的方法就是把前视距离表示为车辆纵向速度的线性函数,即:\(l_d=k \cdot v+l_0\),其中k为速度增益值,\(l_0\)是一个基础前视距离(或称为静态前视距离)。
- 4.找到目标点𝐺:以车的后轮中心为圆心,\(l_d\)为半径画圆弧,在规划路径上找到距离车辆后轮中心\(l_d\)距离的交点,交点在不同路径中可能不只一个,通常情况下选择比较靠近车辆的目标点为最终的预瞄点。
- 5.将目标点转换为车辆坐标系下,方便计算横向误差。
- 6.根据公式计算转角,并要求车辆将转向设置为该转角

 浙公网安备 33010602011771号
浙公网安备 33010602011771号